



 CaptureOnePro12于2018年底发布,引入创新功能与界面优化,包括亮度蒙版、线性渐变蒙版等工具,增强RAW图像编辑能力。支持新相机与镜头,如尼康Z7、佳能EOS R。新增富士胶片色彩模拟,提升用户体验。
CaptureOnePro12于2018年底发布,引入创新功能与界面优化,包括亮度蒙版、线性渐变蒙版等工具,增强RAW图像编辑能力。支持新相机与镜头,如尼康Z7、佳能EOS R。新增富士胶片色彩模拟,提升用户体验。
Capture One Pro 12在2018年11月底正式发布,改进并新增了许多新功能,官方售价为299美元。
Capture One是一款 RAW 图像编辑软件,它将所有必备工具和高端性能融于一体、使您在一套快捷、灵活且有效的工作流程中捕获、整理、编辑、分享以及打印图像。在 RAW 文件图像编辑中处于领先地位。
Capture One长期以来被认为是RAW图像编辑和图像管理的行业标准。Phase One软件业务副总裁Jan Hyldebrandt-Larsen说。“通过此次更新,我们专注于为用户提供创意功能—— 更新并改进了用户界面,添加强大的新遮罩工具,以及通过插件支持扩展Capture One生态系统。”
新版本的推出,通常带来对新相机和新镜头的支持,此次增加了对尼康Z7、尼康Z6、佳能EOS R、佳能EOS M50等的支持。
官方宣传视频
Capture One 12改进及新增功能
注:中文版(汉化版)的一些关键词与国内通用用语不太一致,用过别的修图软件的需要去短暂适应。
(1)功能更强大、界面更精致、菜单选项卡更优化
颜色、图标和总体设计都经过了优化,适合长时间的编辑图像,并使自定义工作区也变得更加简单。
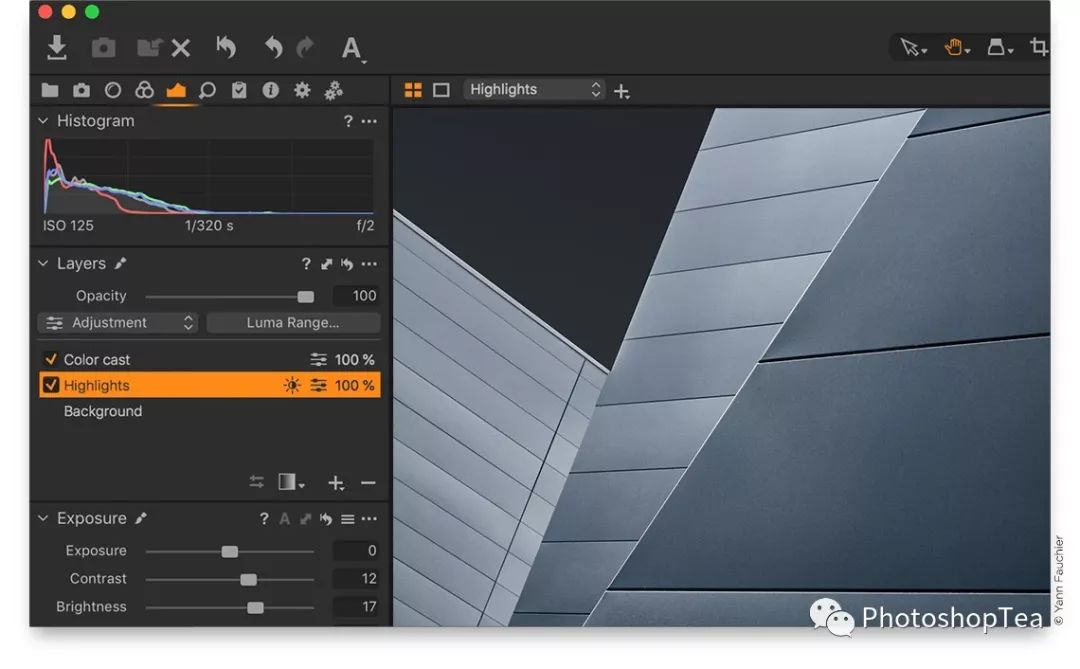
(2)强大的亮度蒙版工具
中文版名:亮度范围,英文版名:Luma Range
亮度蒙版开辟了不可思议的编辑可能性,能实现选择性降噪到精确的颜色分级。比如,仅对图像中最暗的阴影应用阴影恢复,或增加最亮部分的清晰度等。

(3)线性渐变蒙版
中文版名:线性渐变遮罩,英文版名:Linear Gradient Masks
Capture One 12对渐变蒙版进行了升级,造就了可编辑、可移动、可旋转,同时也是最好的非对称渐变蒙版。 Capture One采用全新的参数化蒙版引擎,可通过简单的鼠标点击和键盘敲击操作,对蒙版的尺寸、形状和对称性进行调整。这根本重塑了Capture One中线性渐变的可能性。
(4)径向渐变蒙版
中文版名:放射性渐变遮罩,英文版名:Radial Gradient Masks。
径向蒙版使其易于塑造并转换具有柔化边缘的圆形蒙版。它可用于自定义暗角、创造性效果或增强聚焦区域等,并可调整内部或外部形状。

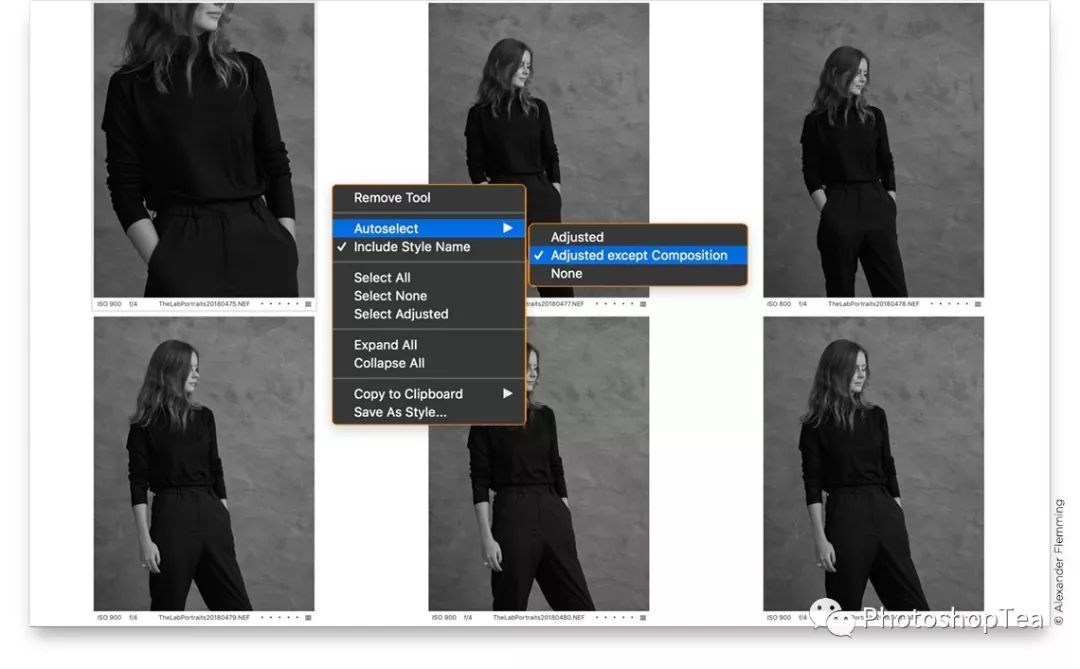
(5)智能的调整拷贝
在图像之间进行复制调整时,Capture One将自动检测快速工作流的变化 。特定的图像调整(如构图或去斑)在默认情况下会被忽略,但如果需要的话可以手动添加。
(6)重新设计的键盘快捷键管理器
搜索或自定义Capture One的快捷键,使您的工作流程实现质的飞跃。 Capture One快捷键面板现支持搜索功能。

(6)新的插件生态系统
为满足摄影师和创意人员在图片共享、编辑和协作上的需求,Capture One插件生态系统为强大的第三方扩展打开了大门。
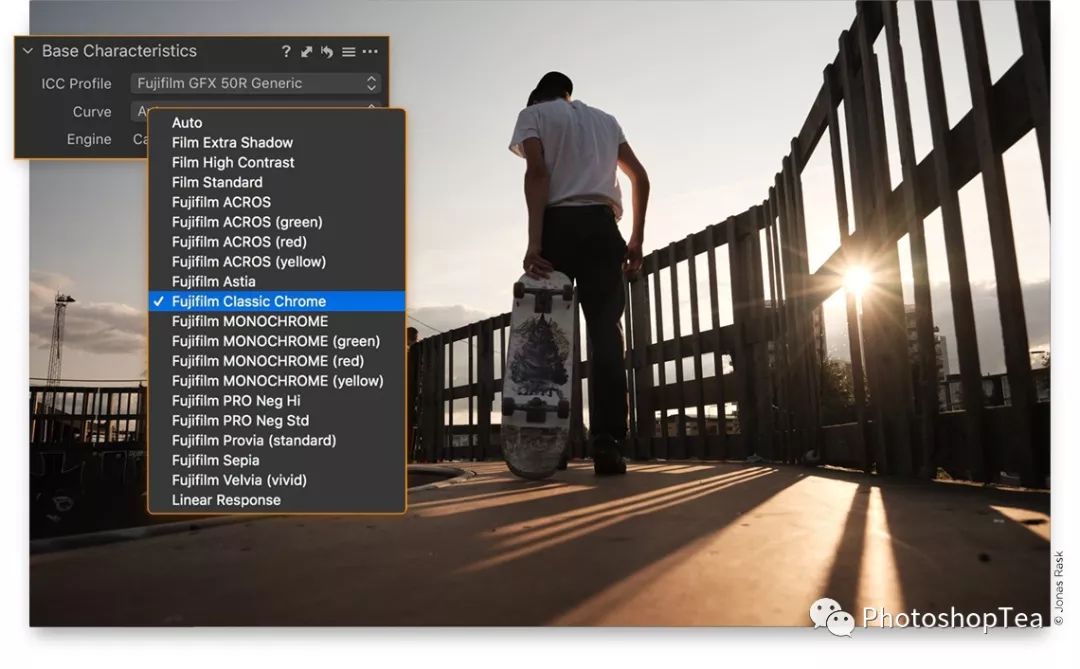
(7)富士胶片色彩模拟
增加了富士相机的胶片风格预设,有多种模式可供选择,还原传统富士摄影胶片的颜色和色调,让图像看起来与相机应用风格预设的图像配置文件一样。
(8)支持扩展的AppleScript脚本语言
注:本文所有截图和视频均来自官方英文网站。后续介绍使用Capture One Pro 12的方法和技巧将基于中文版。敬请期待。

















 1195
1195

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









