







一、Local Interconnect Network
LIN 是 Local Interconnect Network(局部互联网) 的缩写,是基于 UART/SCI(Universal Asynchronous Receiver-Transmitter / Serial Communication Interface,通用异步收发器/串行通信接口)的低成本、低速率(20kbps)、串行通信总线。
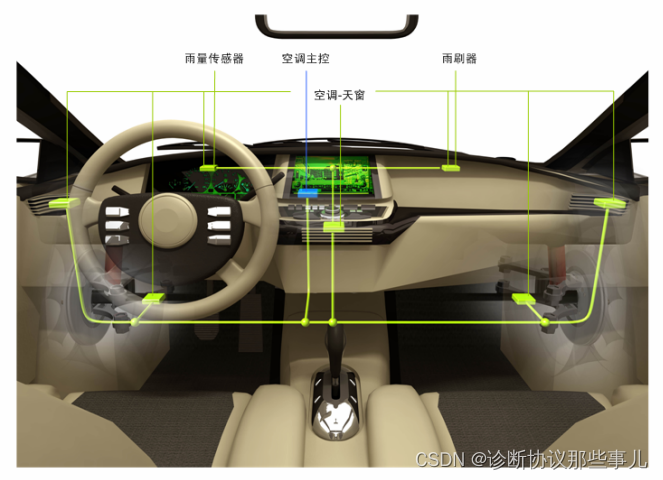
LIN在汽车中主要应用在车身系统,是CAN总线的补充,适用于对总线性能要求不高的车身系统,如车门、车窗、灯光等智能传感器、执行器的连接和控制。
二、LIN协议历史
LIN1.1
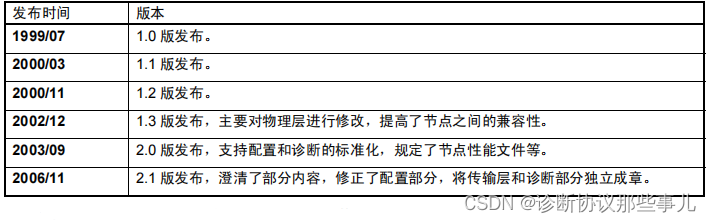
第一版规范于1999年制定。次年,联盟于SAE大会上发布了1.1版本,包含以下部分:LIN协议规范、LIN配置语言规范、LIN应用程序接口规范。
LIN 1.2/LIN 1.3
2000年对LIN1.1规范进行修订,同年11月发布了LIN1.2版本。2002年11月发布了LIN1.3版本,特别增加了物理层。
LIN2.0
为应对汽车行业的发展趋势,实现节点的“即插即用”,经过一年的修订,2003年9月发布了2.0版本。增加了诊断规范和节点能力语言规范,SAE J2602是2.0的变形。
LIN 2.1/LIN 2.2
2006年11月发布了规范2.1,增加了传输层规范和节点配置规范,形成八个子规范。2010年12月发布了LIN规范2.2,修正了一些小错误,并弱化了位采样规则。
1996 年,Volvo和Volcano通讯(VCT)为Volvo S80 系列开发了一种基于UART/SCI的协议,即Volcano Lite。
1997 年,Motorola与Volvo和VCT合作,帮助它们改进Volcano Lite协议以满足各种不同需求(比如无需晶振的从机设备自动同步),并制定可以支持各种半导体产品的开放标准。1998 年 12 月,Audi、BMW、Daimler Chrysler和Volkswagen也加入进来,由此形成了LIN协会(http://www.lin-subbus.org)。开发LIN标准的目的在于适应分层次车内网络在低端(速度和可靠性要求不高、低成本的场合)的需求。

三、CAN-LIN网关
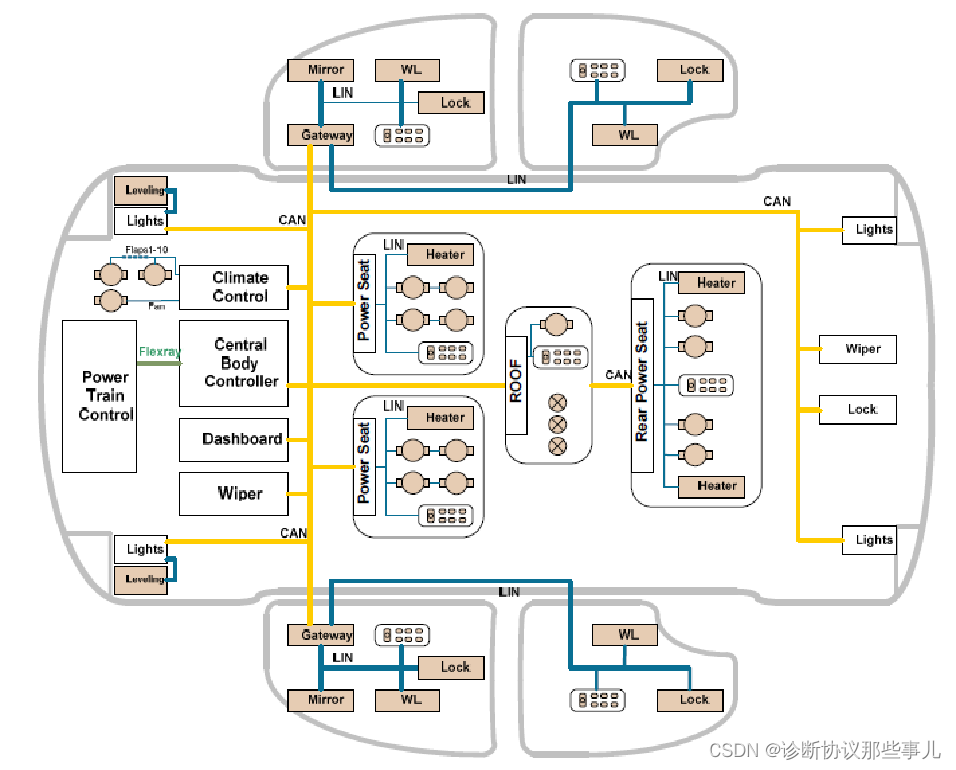
1. 由于 LIN 网络在汽车中一般不独立存在,经常与上层网络(如 CAN)相连,因此子网的概念是相对于上层网络而言。在不强调与上层网络相连的情况下,后面也称作 LIN 网络。
2. 一个节点不一定对应一个 ECU(Electronic Control Unit,电子控制单元),因为一个 ECU 可能提供多个LIN 接口,并且这些接口可能连接到不同的 LIN 通信子网中。
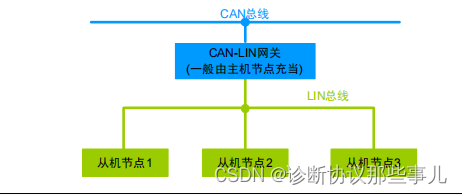
图示为一典型的车载 LIN 通信子网,黄色方块为 LIN 的从机节点,蓝色方块为 LIN 的主机节点,一个节点即一个 LIN 接口。LIN 网络与主干线 CAN(Controller Area Network,控制器局域网)总线相连时,需要加入 CAN-LIN 网关,一般由主机节点来充当。
四、Lin总线被广泛应用的原因
①高/低速CAN和J1850总线已经成为标准的车用网络总线。这些总线速度极高,具有高抗电磁干扰性和高传输可靠性等优越的性能,但价格也较高。
②大量的车身和安全性能方面的应用对车用网络总线的性能要求并不太高,只需要一种性价比更高的标准车用网络总线,而LIN总线正好可以满足这一需求。
因此,目前LIN总线技术正被越来越广泛的应用到车身电子中。



















 1308
1308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











