






滑模控制器的理论设计与仿真实现
滑模控制器的设计与仿真实现,可以具体参考我之前写的博客文章如下:
滑模控制的转速控制器
为了进一步将滑模控制器应用到双闭环矢量控制中去,为此搭建如下仿真模型并进行仿真分析。并且对比小论文的改进效果,在此将仿真结果图2-4,分析仿真结果产生变化的原因。假定电流环均都是PI控制器,人为已经是整定至最佳的状态,从而来考量改进的效果与创新点。
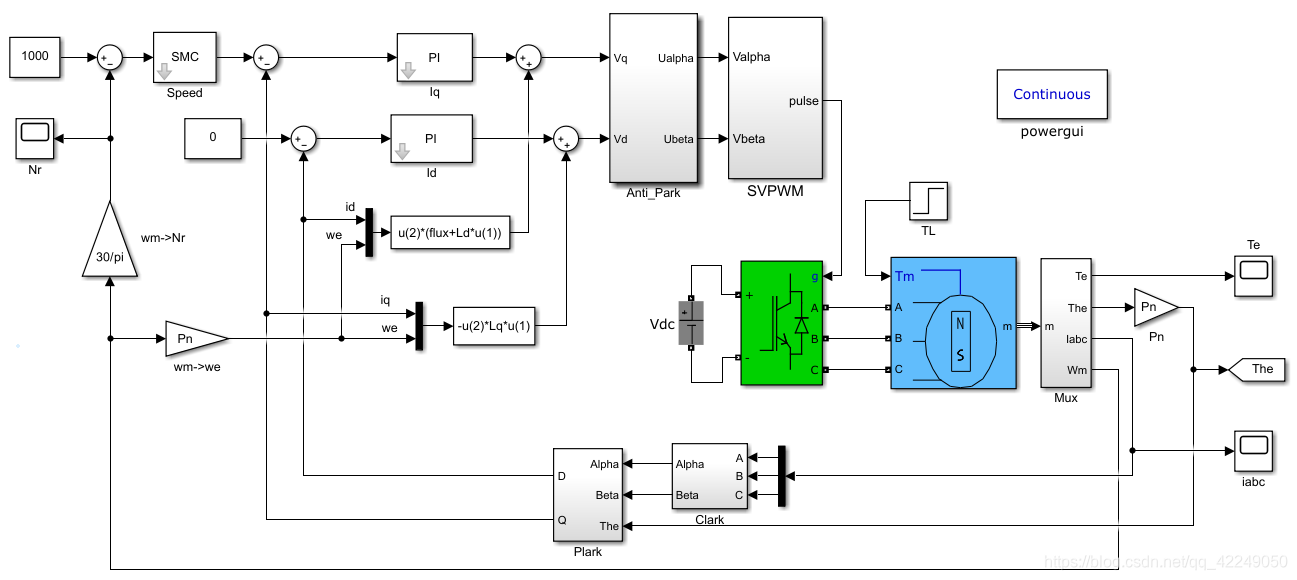
图1 转速环为滑模控制的矢量控制仿真图
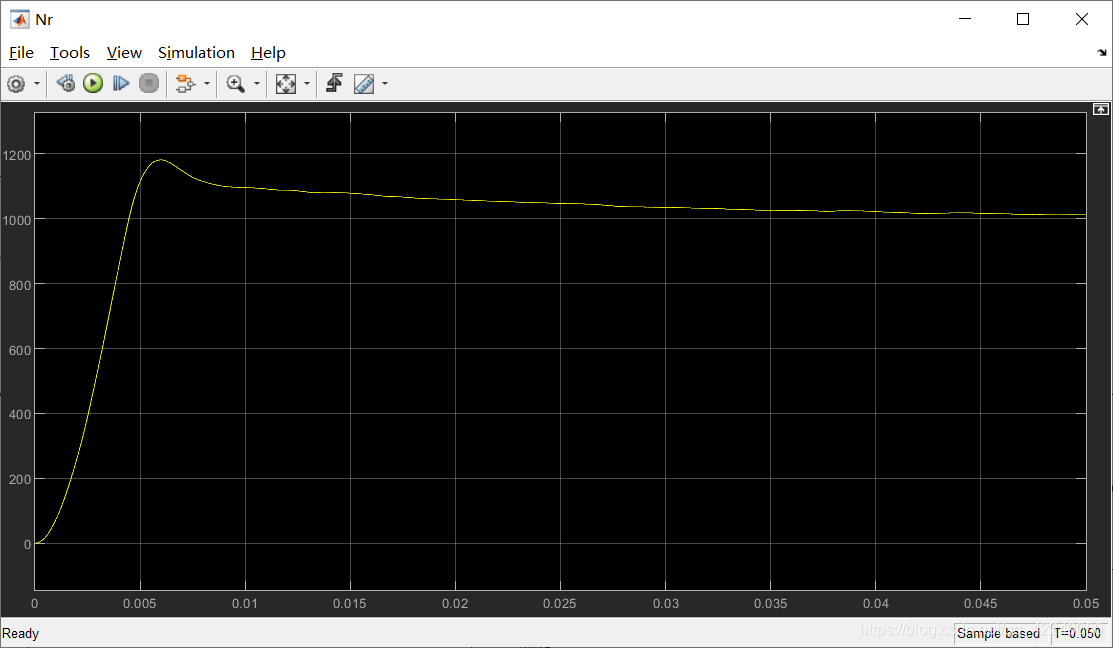
图2 转速仿真输出波形
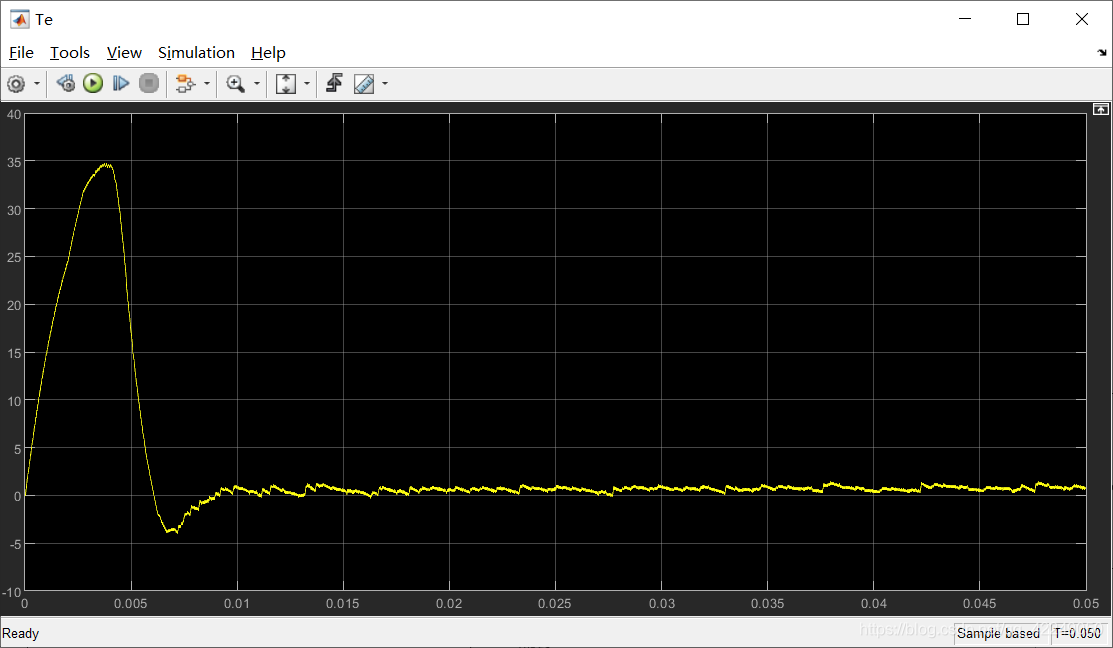
图3 转矩仿真输出波形
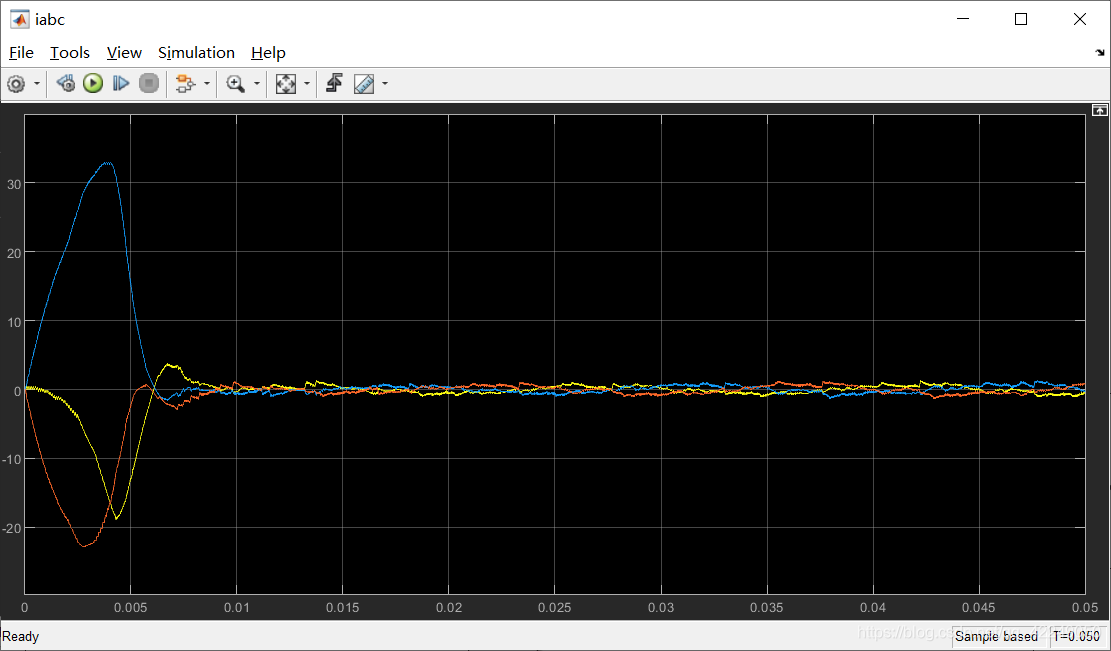
图4 相电流仿真输出波形
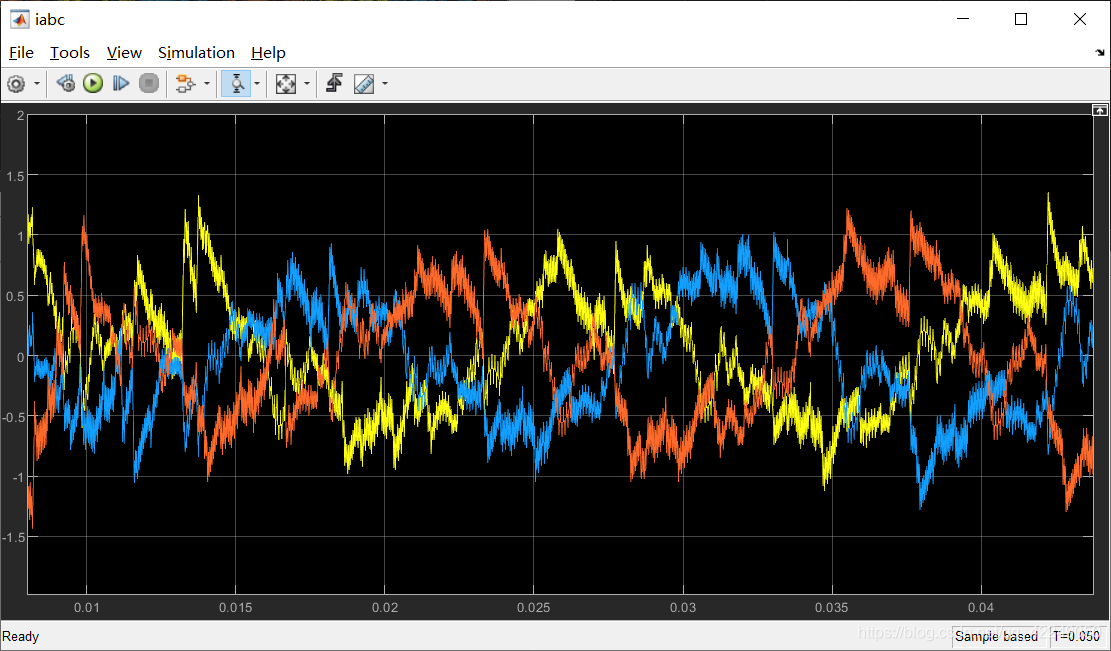
图5 相电流仿真局部放大图形

图6 相电流THD分析图
总结
由图2可看出,该控制系统的转速超调严重,且转速的波动较大;响应速度慢,且跟踪特性不太好;转矩脉动较大,主要是由于三相电流的正弦度不够,以及启动时峰值转矩过大等等恶化性能,这也可以由图6可看出。相电流的THD较大,肯定是无法适用于实际生产实际的。















 482
482











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











