







第一次发布博客,有很多不懂.见笑了
数据手册
链接:https://pan.baidu.com/s/1kJvWSDfan5lyPg0boz-1ZQ
提取码:fyzy
小重点
- ZPH01 每一秒会发送一次数据
- 初次使用的时候建议预热5分钟以上.
- ZPH01 每一秒会发送一次数据 初次使用的时候建议预热5分钟以上.
- 建议拿胶布or遮光的东西遮挡住,硬件上方的三角口这样可以保持数值的精准(红外线的也准不到哪去,除非激光的)
引脚&模式的定义
我这里选择的是,使用串口接收。
引脚的接线
TX(接RX)
RX(接不接都无所谓,在串口模式下ZPH01只发数据,不接受命令)
GND(当然是接GND啦)
模式脚(浮空为PMW输出模式,接GND为选择串口模式)
注意!!! 串口模式下 GND和模式脚都要 接地 接地 接地
重要事情说三遍
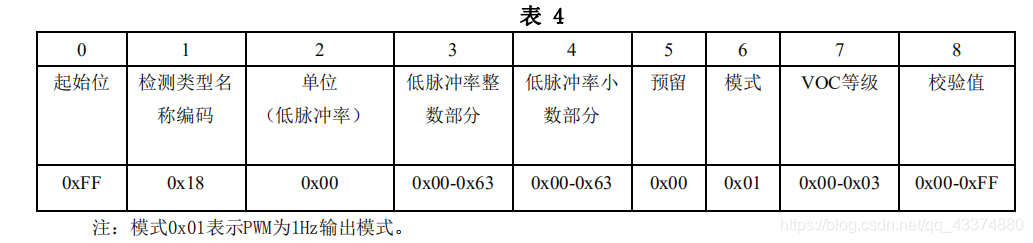
数据格式
串口模式下从机发送过来的数据模式
代码
我接入的是串口2,然后使用串口1printf输出.
没有使用到串口中断.
.c的
#include "Zph01.h"
void Zph01_Init(void){
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//使能USART2时钟
GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_USART2);//映射到PA2
GPIO_PinAFConfig(GPIOA,GPIO_PinSource3,GPIO_AF_USART2);//映射到PA3
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //配置:复用
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //配置:推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //配置:速度
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //配置:无上下拉
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //配置:复用
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //配置:推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //配置:速度
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //配置:无上下拉
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART_InitStructure.USART_BaudRate=9600;//设置:波特率
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;设置:硬件流
USART_InitStructure.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;设置:模式
USART_InitStructure.USART_Parity=USART_Parity_No;//设置:奇偶校验位
USART_InitStructure.USART_StopBits=USART_StopBits_1;//设置:停止位
USART_InitStructure.USART_WordLength=USART_WordLength_8b;设置:字长
USART_Init(USART2,&USART_InitStructure);//串口服务库函数
USART_Cmd(USART2,ENABLE);//使能串口库函数
}
u8 Buf_Cnt;//数据大小
unsigned char Buf[9];//用于存放接收到的数据
unsigned char flag[5]={0xff,0x18,0x00,0x00,0x01};
void Zph01_Rend_buf(void)
{
uint16_t value;
u8 i;
while(USART2->SR &(1<<5)){//判断Zph01是否把数据是否已经写入DR寄存器
value = USART_ReceiveData(USART2);
if(Buf_Cnt<9)
{
Buf[Buf_Cnt++] = value;
}
else{
for(i=0;i<9;i++)
printf("%c",Buf[i]);
Buf_Cnt=0;
}
}
}
.h的
#ifndef _ZPH01_H
#define _ZPH01_H
#include "stm32f4xx.h"
#include "io_bit.h"
#include "stdlib.h"
#include "string.h"
#include "delay.h"
#include "stdio.h"
void Zph01_Init(void);
void Zph01_Rend_buf(void);//发送接收到的数据
#endif
总结
第一次发自己的代码出来,如果有什么问题或者更好的解决方法,希望告知,共同进步谢谢大家.














 7068
7068











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









