







目录
1.图片类型符合,我们就不需要用图片转换工具了。我们先要找到每一个零件。
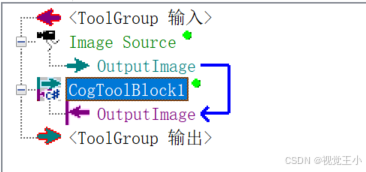
2.创建CogToolBlock工具,我们在block里面操作。
1.案例要求
测量零件的内径(半径)

2.实现思路
我们先进行思考。
1.图片类型符合,我们就不需要用图片转换工具了。我们先要找到每一个零件。
2.依据匹配获得的中心点获取所有圆
3.计算得出所测量的内径
4.编写脚本进行遍历
3.具体操作
1.我们先创建一个Block工具,方便写脚本。
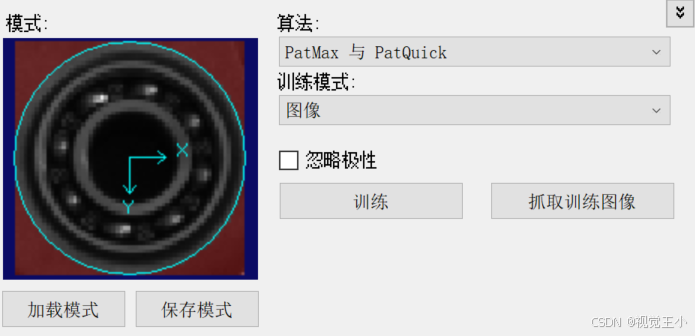
创建模板匹配工具
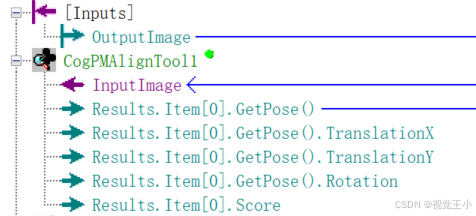
设置好要训练的图像,因为我们要找的是零件内径,而且它特征也明显,所以我们直接匹配他就可以
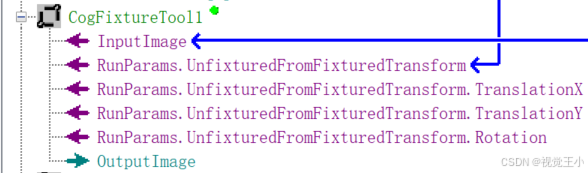
创建定位工具
2.创建CogToolBlock工具,我们在block里面操作。
创建一个找圆工具,之后再脚本里便利,这里我们只需要把图片传入就可以
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1773
1773

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









