



SLAM
好奇机器人领域,所以开始探索啦!
一、SLAM是啥?
英文叫simultaneous localization and mapping,叫及时定位与地图构建。
- 定位:机器人通过眼睛获取自己在环境中的位置和姿态
- 地图构建:我周围的环境是什么样子?机器人记录附近的环境中特征的相对位置。
- SLAM:同时估计机器人的位姿和环境地图
总的来说,机器人从一个未知的位置开始移动,在移动的过程中根据位置估计和传感器数据进行自身定位,同时在自身定位的基础上构造增量式地图,实现定位和导航。
核心是定位姿,目标是建图。
二、SLAM有什么用?
扫地、拖地机器人
汽车自动驾驶
酒店机器人助手
手持SLAM扫描仪
三、根据传感器分类
| 类型 | 使用场景 | 特点 |
|---|---|---|
| 二维激光雷达 | 室内移动机器人 | 成本低 |
| 三维激光雷达 | 室内室外、测绘、大场景 | 成本高、信息量大 |
| 视觉 | 室内室外 | 成本高、信息量丰富、稳定性差 |
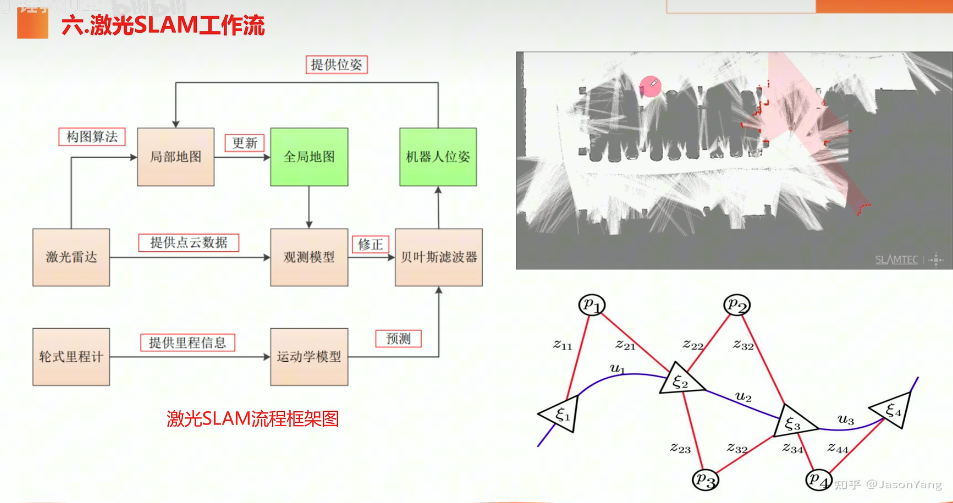
四、激光3D SLAM的优势
(1)激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。
(2)激光SLAM系统通过对不同时刻的两片点云的匹配与对比,计算激光雷达相对运动的距离和姿态的改变,也就完成了机器人自身的定位。
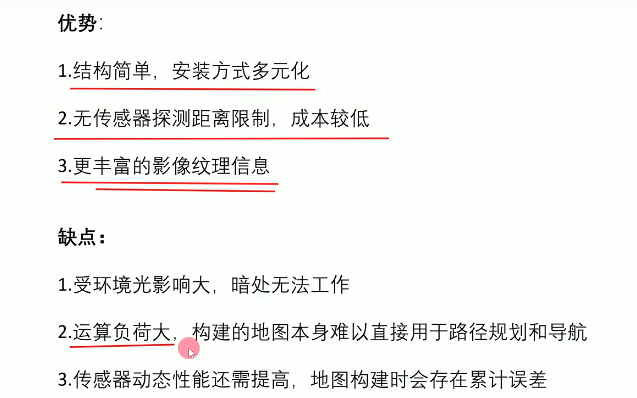
五、视觉 SLAM的优势和缺点
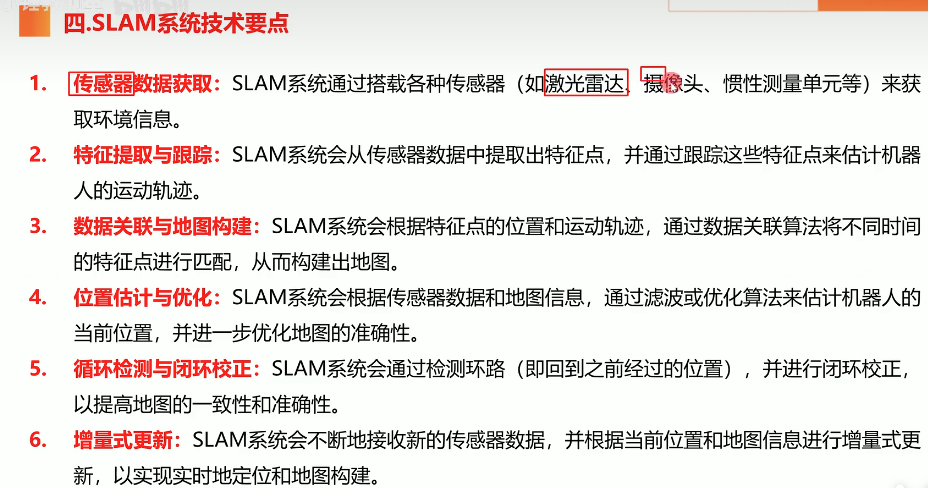
六、SLAM技术要点
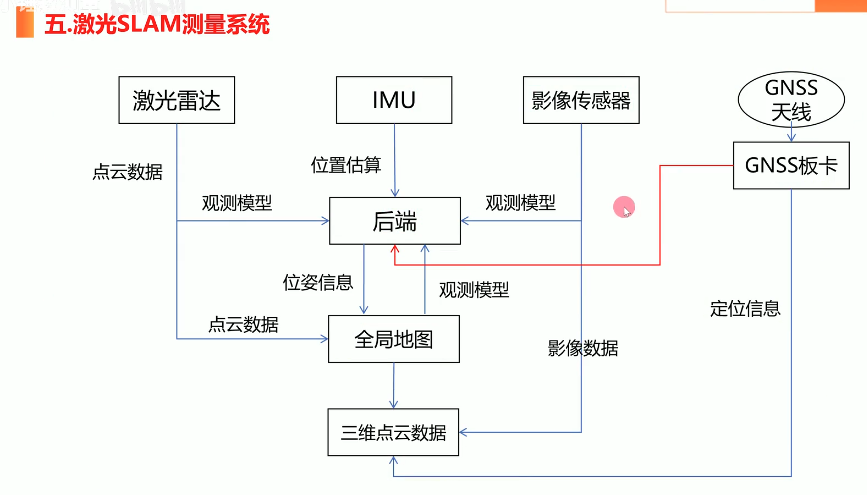
七、激光SLAM测量系统
八、激光SLAM与三维重建的区别

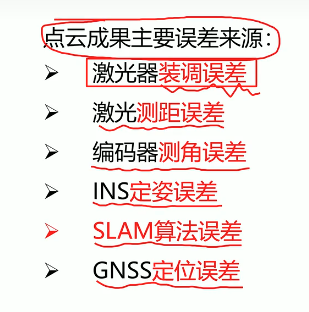
九、激光SLAM点云成果主要误差来源

















 556
556

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









