




 本文介绍了在Codesys中添加伺服轴的步骤,详细讲解了MC_Power、MC_MoveVelocity和MC_Stop三个轴控制指令的使用,并提供了示例代码。还阐述了如何创建全局变量以及通过trace监控轴控制状态。
本文介绍了在Codesys中添加伺服轴的步骤,详细讲解了MC_Power、MC_MoveVelocity和MC_Stop三个轴控制指令的使用,并提供了示例代码。还阐述了如何创建全局变量以及通过trace监控轴控制状态。
以下内容纯属个人理解,如有错误欢迎指正。
本篇主要讲述如何添加伺服轴,进而学习轴控制指令、如何创建全局变量,并插入trace进行监控输出波形来加深对MC_Power、MC_MoveVelocity、MC_Stop指令的理解。
添加伺服轴
第一步就是在汇川官网(SV630系列经济型伺服驱动器 (inovance.com))上下载对应的轴的XML文件并导入到软件中,导入方法在软件安装部分有讲到(Codesys——软件安装_codesys 安装_Tlom_H的博客-CSDN博客)。

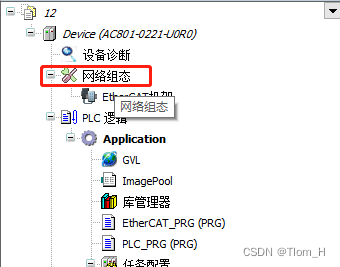
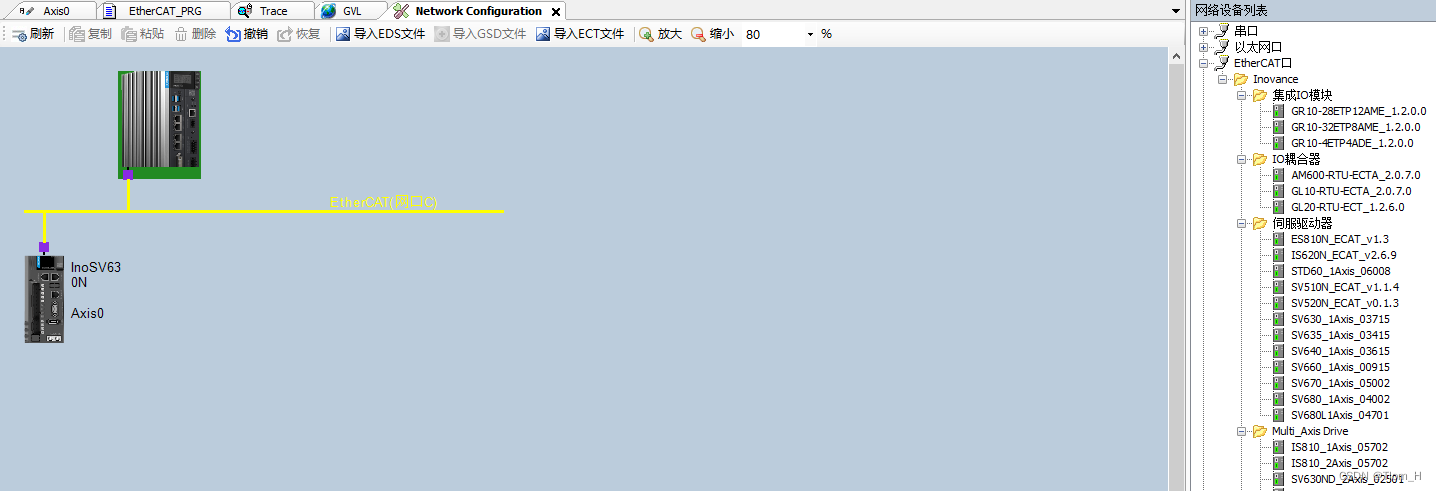
第二步:插入之后,双击网络组态。
第三步:双击自己需要的伺服轴,即可进行添加。
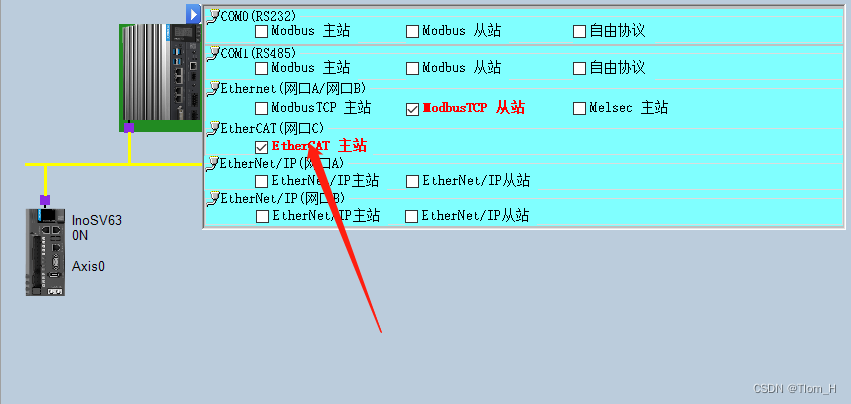
第四步:单击主机,可以看到主机的EtherCAT主站已经自动勾选上。
第五步:左侧项目树中就可以看到我们新建的轴,可以对轴进行重命名(右键-属性)。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









