







本篇介绍如何在ROS环境中使用 WHEELTEC N100 惯导模块。
轮趣 IMU N100 的 ROS 驱动程序下载链接:轮趣 IMU 资料 - 坚果云 - 云盘|网盘|企业网盘|同步|备份|无限空间|免费网络硬盘|企业云盘
1、CP2102 固定串口号
1.1 、修改串口号
在 Windows 中需要把 WHEELTEC N 系列上的 CP2102 芯片串口号改为 0003,
用 USB 线把惯导模块连接电脑, 通过 CP21xxCustomizationUtility 这个 windows
上的软件修改并固定,操作如下图: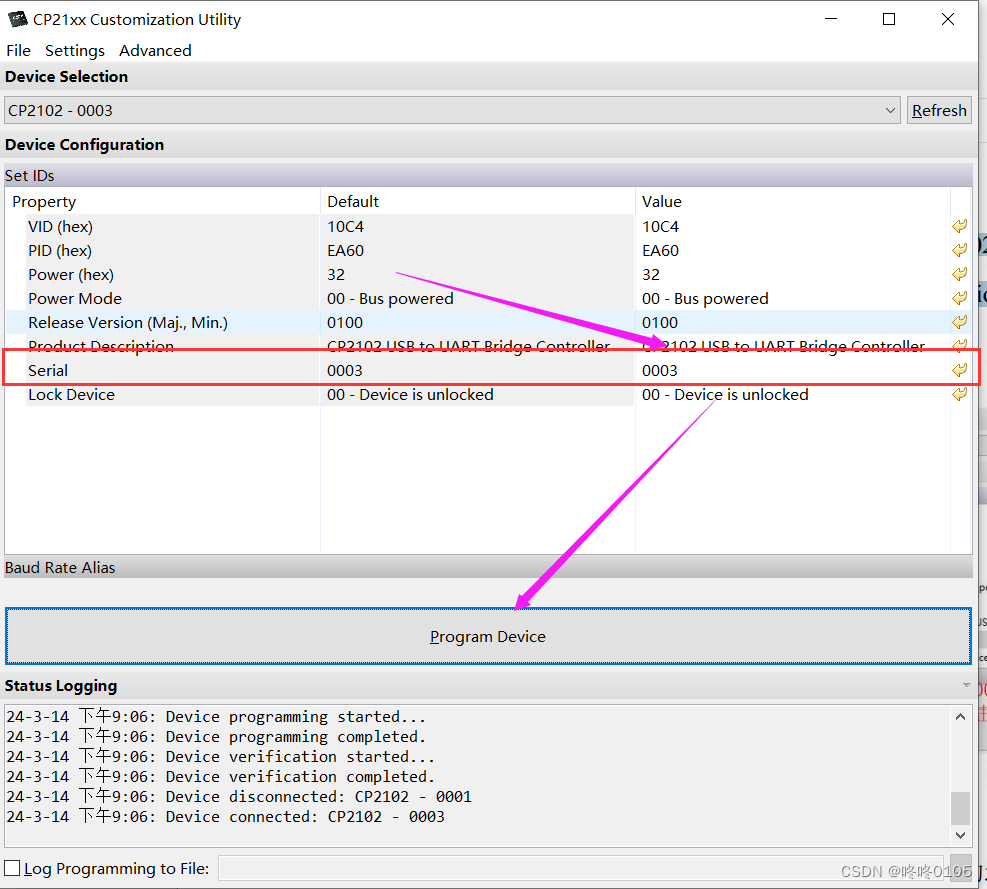
先在Serial的地方将端口修改为0003,然后再点击Program Device 应用生成。
1.2、在 ROS 系统中为其生成端口别名
在轮趣提供的 ROS_SDK 中找到 wheeltec_udev.sh 文件,其内容如下
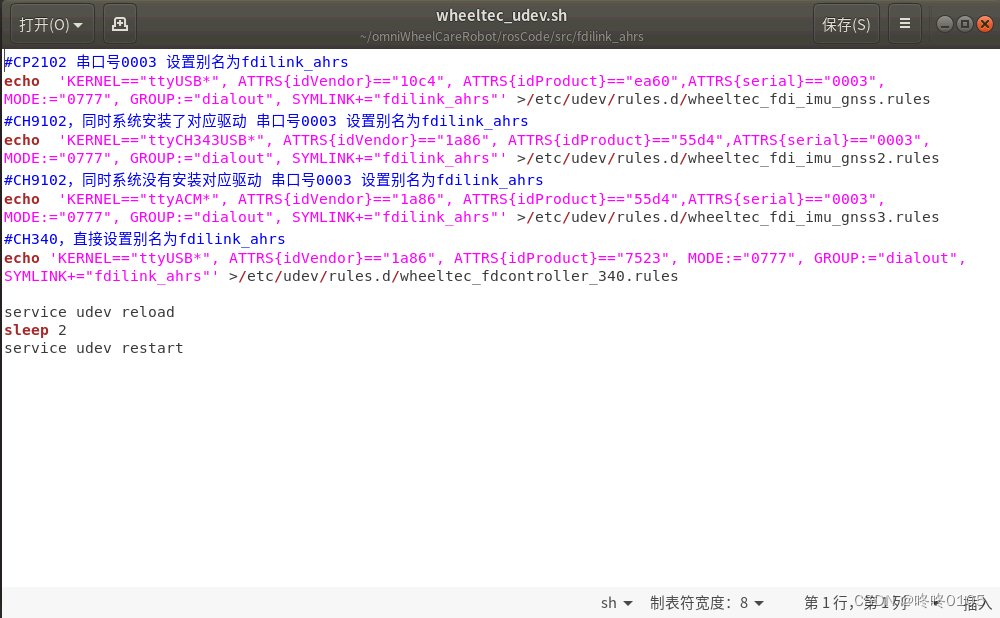
可看到其中的 ATTRS{serial}=="0003" 恰好对应刚刚修改的 IMU 的端口号,依次运行以下两个指令, 即可完成创建别名的工作
# 文件赋权:
sudo chmod 777 wheeltec_udev.sh
# 执行脚本:
sudo ./wheeltec_udev.sh
执行完成后使用 ll /dev 即可查看别名的生成情况
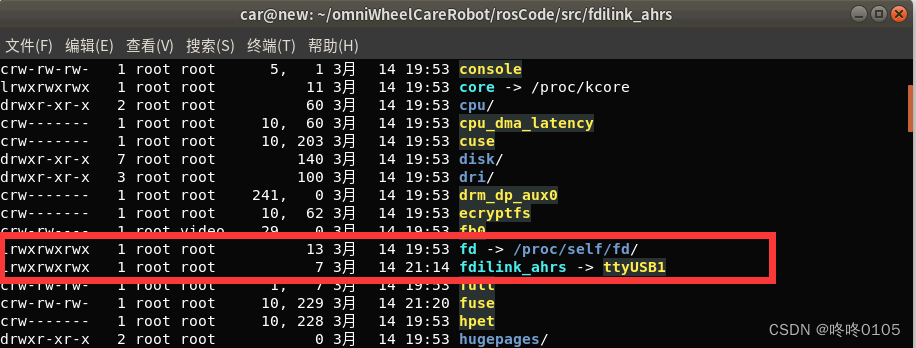
这时,便不用担心 IMU 的端口号改变的问题,fdilink_ahrs 会主动定位 IMU 的端口,并且以 fdilink_ahrs 的名称进行映射端口号。
2、验证测试
1)在执行完上面的在步骤之后,便证明端口的创建成功,接下来进入到放置 IMU 程序工作空间文件夹下,首先执行编译程序包,使用如下指令
catkin_make2)执行如下程序查看 IMU 发布的数据
# 刷新环境变量
source ./devel/setup.bash
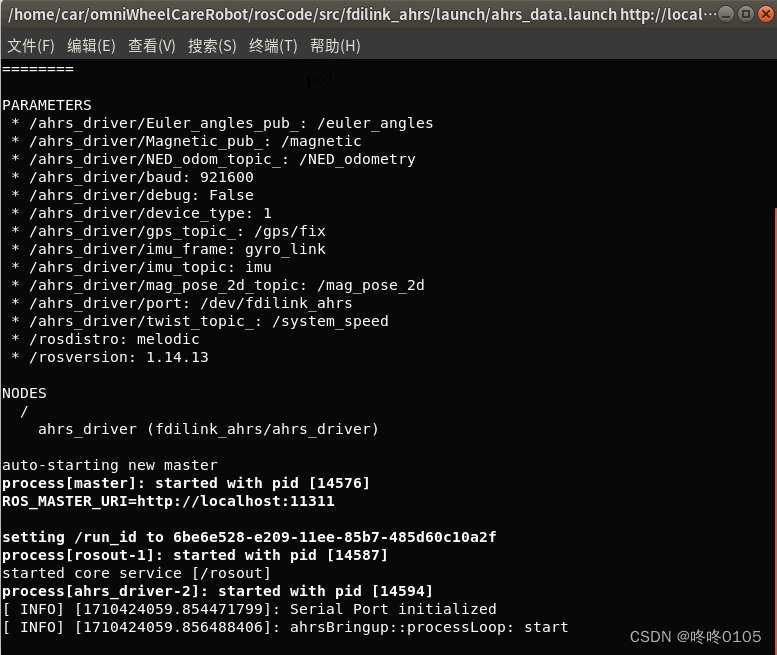
# 启动 IMU 数据包
roslaunch fdilink_ahrs ahrs_data.launch正常启动如下图所示
使用 rostopic list 查看发布的节点
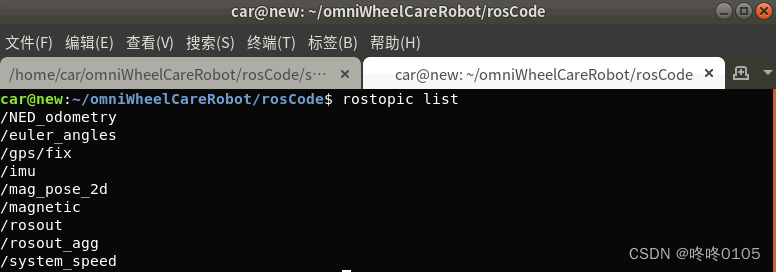
使用 rostopic echo imu 查看 IMU 数据

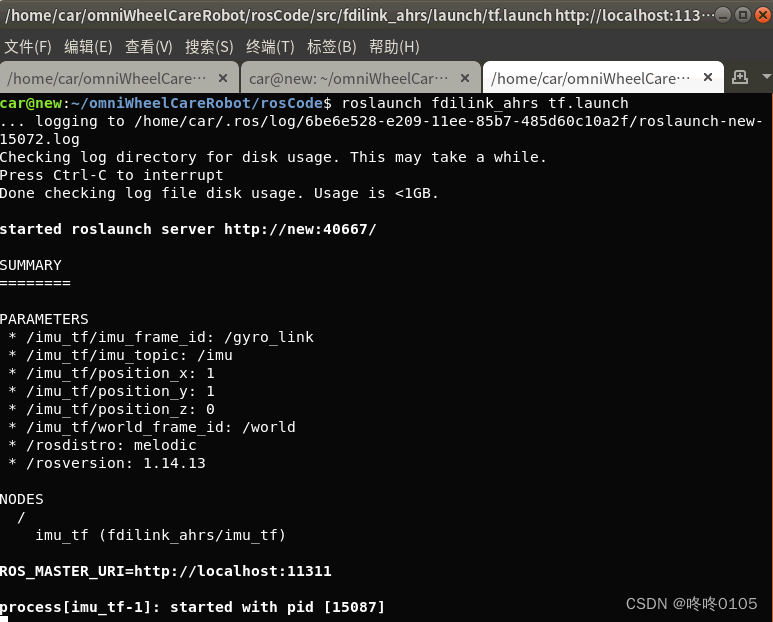
保持前面的 roslaunch fdilink_ahrs ahrs_data.launch 程序发布,再打开一个新终端启动 TF 节点查看 IMU 的位置变化,启动 TF 的指令如下
# 刷新环境变量
source ./devel/setup.bash
# 启动 IMU 的 TF 节点文件
roslaunch fdilink_ahrs tf.launch
再打开一个新终端,输入 rviz ,启动 rviz 可视化工具,并且在 Fixed Frame 处选择 world ,然后再添加一个 TF 工具,即可查看到如下图所示的相对关系
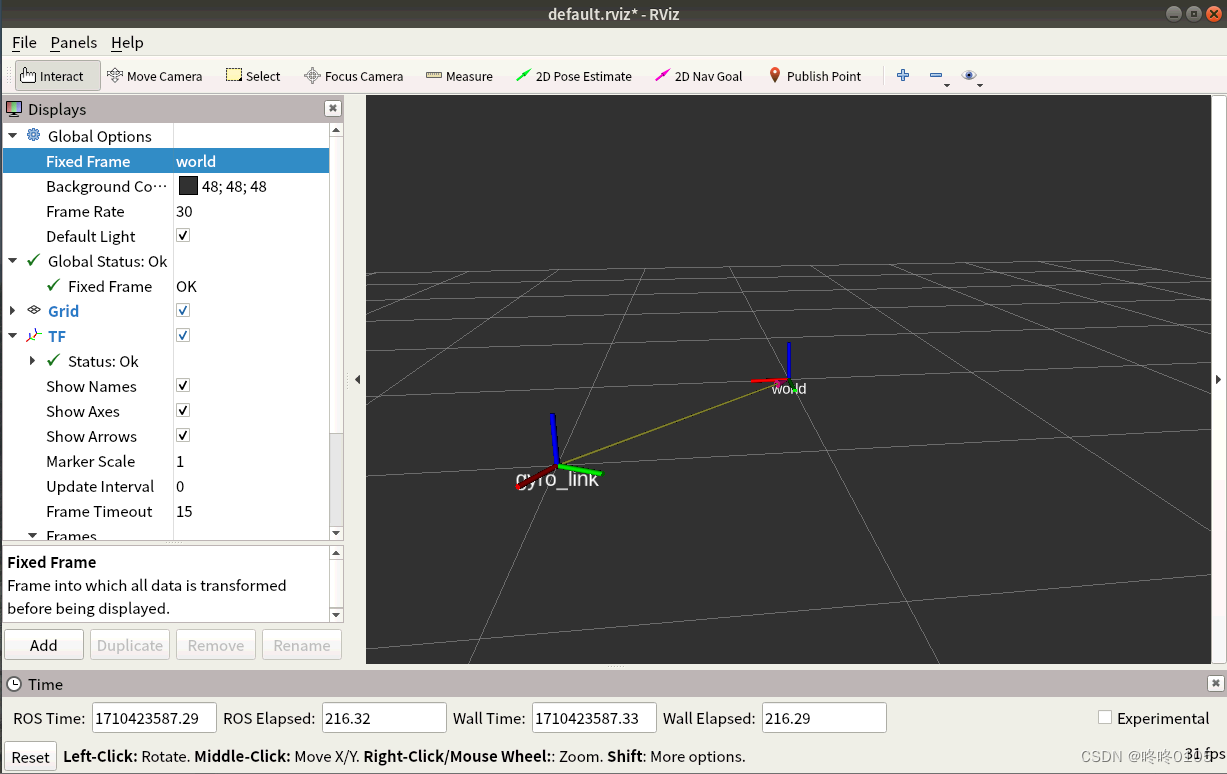
至此,轮趣 IMU N100 九轴 IMU 的 ROS 驱动安装完成。

















 503
503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









