







1 简介
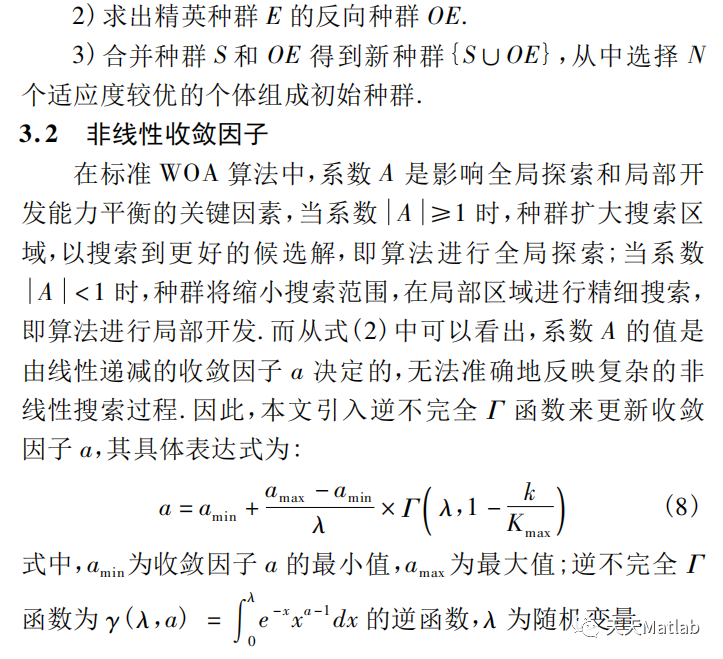
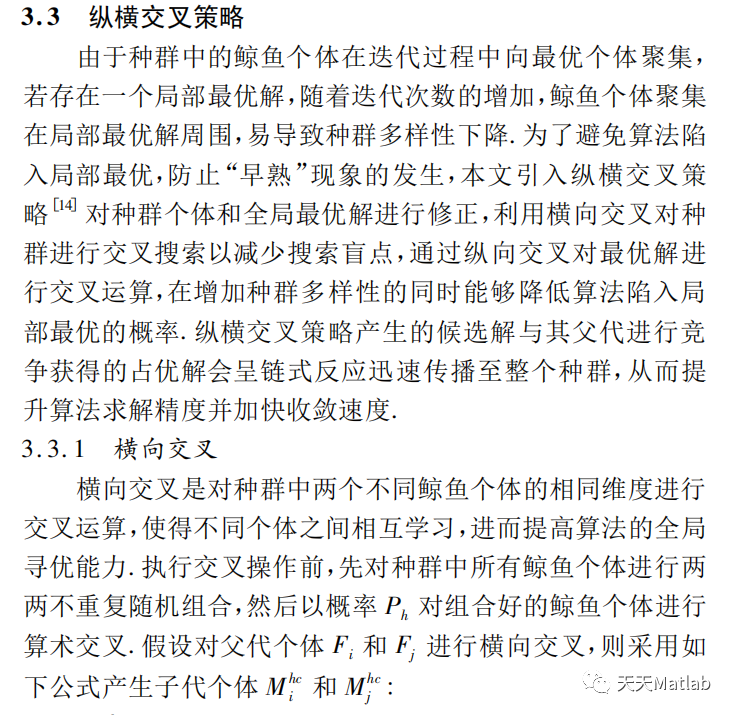
针对鲸鱼优化算法收敛速度慢,收敛精度低以及易陷入局部最优等问题,提出一种基于精英反向和纵横交叉的鲸鱼优化算法(ECWOA).该算法首先通过精英反向学习策略初始化种群,以提高初始解的质量,加快全局收敛速度;其次,采用逆不完全Γ函数更新收敛因子来平衡算法全局探索和局部开发能力;最后,利用纵横交叉策略对种群和全局最优解进行修正,以此来保证种群个体的多样性,提高算法跳出局部最优的能力.通过对8个经典测试函数的仿真实验表明,ECWOA算法的寻优精度和收敛速度均有明显的提升.
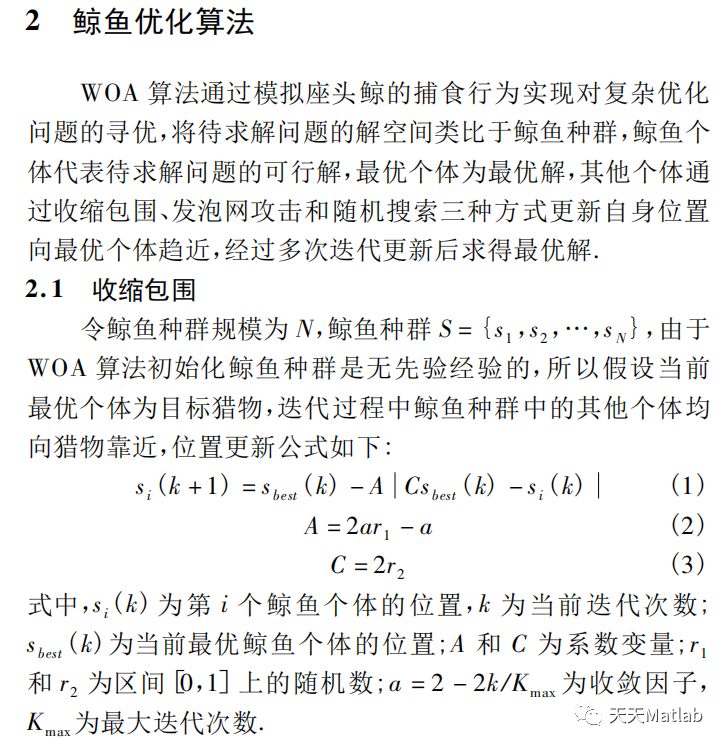


2 部分代码
%_________________________________________________________________________%
% Whale Optimization Algorithm (WOA) source codes demo 1.0 %
% %
% %
%_________________________________________________________________________%
% You can simply define your cost in a seperate file and load its handle to fobj
% The initial parameters that you need are:
%__________________________________________
% fobj = @YourCostFunction
% dim = number of your variables
% Max_iteration = maximum number of generations
% SearchAgents_no = number of search agents
% lb=[lb1,lb2,...,lbn] where lbn is the lower bound of variable n
% ub=[ub1,ub2,...,ubn] where ubn is the upper bound of variable n
% If all the variables have equal lower bound you can just
% define lb and ub as two single number numbers
% To run ALO: [Best_score,Best_pos,cg_curve]=ALO(SearchAgents_no,Max_iteration,lb,ub,dim,fobj)
% The Whale Optimization Algorithm
function [Leader_score,Leader_pos,Convergence_curve]=WOA(SearchAgents_no,Max_iter,lb,ub,dim,fobj,handles,value)
% initialize position vector and score for the leader
Leader_pos=zeros(1,dim);
Leader_score=inf; %change this to -inf for maximization problems
%Initialize the positions of search agents
Positions=initialization(SearchAgents_no,dim,ub,lb);
Convergence_curve=zeros(1,Max_iter);
t=0;% Loop counter
% Main loop
while t<Max_iter
for i=1:size(Positions,1)
% Return back the search agents that go beyond the boundaries of the search space
Flag4ub=Positions(i,:)>ub;
Flag4lb=Positions(i,:)<lb;
Positions(i,:)=(Positions(i,:).*(~(Flag4ub+Flag4lb)))+ub.*Flag4ub+lb.*Flag4lb;
% Calculate objective function for each search agent
fitness=fobj(Positions(i,:));
All_fitness(1,i)=fitness;
% Update the leader
if fitness<Leader_score % Change this to > for maximization problem
Leader_score=fitness; % Update alpha
Leader_pos=Positions(i,:);
end
end
a=2-t*((2)/Max_iter); % a decreases linearly fron 2 to 0 in Eq. (2.3)
% a2 linearly dicreases from -1 to -2 to calculate t in Eq. (3.12)
a2=-1+t*((-1)/Max_iter);
% Update the Position of search agents
for i=1:size(Positions,1)
r1=rand(); % r1 is a random number in [0,1]
r2=rand(); % r2 is a random number in [0,1]
A=2*a*r1-a; % Eq. (2.3) in the paper
C=2*r2; % Eq. (2.4) in the paper
b=1; % parameters in Eq. (2.5)
l=(a2-1)*rand+1; % parameters in Eq. (2.5)
p = rand(); % p in Eq. (2.6)
for j=1:size(Positions,2)
if p<0.5
if abs(A)>=1
rand_leader_index = floor(SearchAgents_no*rand()+1);
X_rand = Positions(rand_leader_index, :);
D_X_rand=abs(C*X_rand(j)-Positions(i,j)); % Eq. (2.7)
Positions(i,j)=X_rand(j)-A*D_X_rand; % Eq. (2.8)
elseif abs(A)<1
D_Leader=abs(C*Leader_pos(j)-Positions(i,j)); % Eq. (2.1)
Positions(i,j)=Leader_pos(j)-A*D_Leader; % Eq. (2.2)
end
elseif p>=0.5
distance2Leader=abs(Leader_pos(j)-Positions(i,j));
% Eq. (2.5)
Positions(i,j)=distance2Leader*exp(b.*l).*cos(l.*2*pi)+Leader_pos(j);
end
end
end
t=t+1;
Convergence_curve(t)=Leader_score;
if t>2
line([t-1 t], [Convergence_curve(t-1) Convergence_curve(t)],'Color','b')
xlabel('Iteration');
ylabel('Best score obtained so far');
drawnow
end
set(handles.itertext,'String', ['The current iteration is ', num2str(t)])
set(handles.optimumtext,'String', ['The current optimal value is ', num2str(Leader_score)])
if value==1
hold on
scatter(t*ones(1,SearchAgents_no),All_fitness,'.','k')
end
end
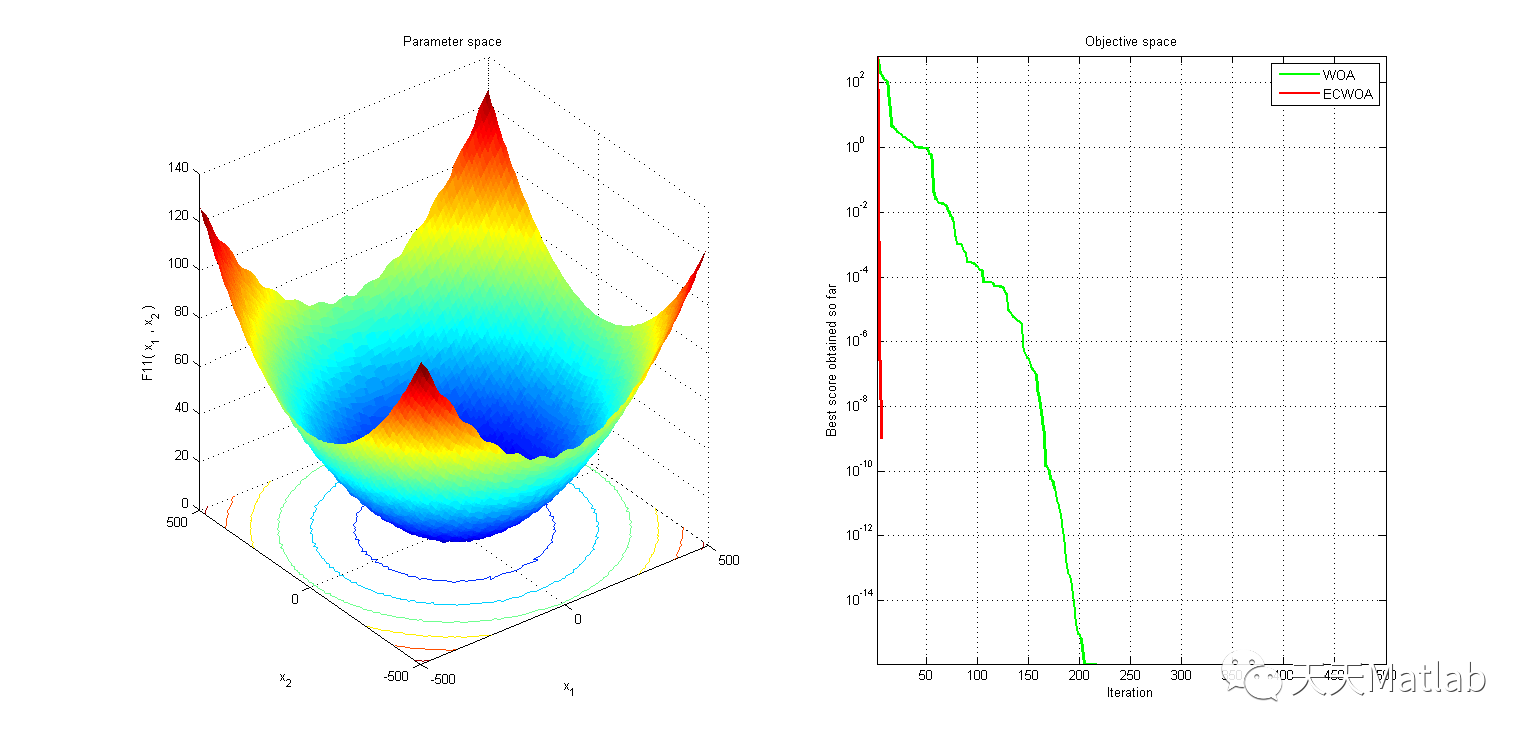
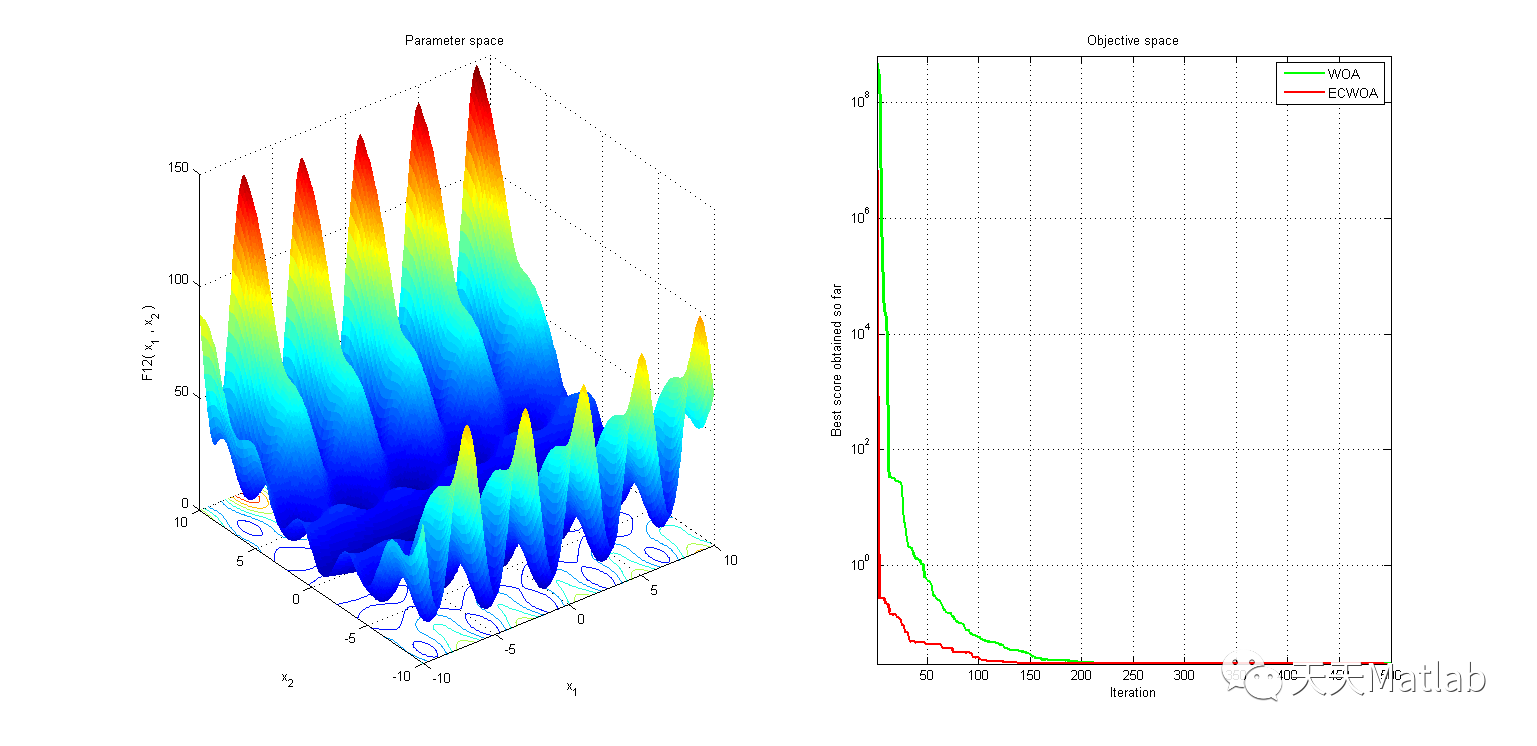
3 仿真结果
4 参考文献
[1]刘琨, 赵露露, 王辉. 一种基于精英反向和纵横交叉的鲸鱼优化算法[J]. 小型微型计算机系统, 2020, 41(10):6.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。















 381
381











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











