




文章目录
0 引言
在深度学习的视觉领域,卷积神经网络(CNN)已经成为主流,但随着网络加深,参数量和计算量迅速膨胀。GoogLeNet 的出现,是一次在保持深度的同时极大降低参数量的创新尝试。本文将带你理解 GoogLeNet 的核心思想、网络结构及实际应用。
1 核心创新:Inception 模块
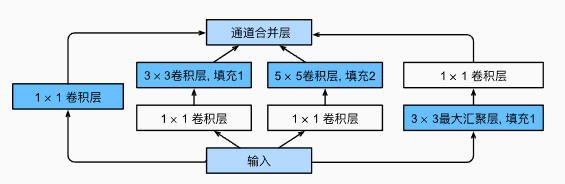
如下图所示,Inception 块由四条并行路径组成。前三条路径分别使用不同尺寸的卷积核(如 1×1、3×3、5×5)提取不同空间尺度的特征。其中,中间两条卷积路径在操作前先进行 1×1 卷积降维,以减少输入通道数,从而降低模型复杂度。第四条路径先通过最大池化层提取特征,再使用 1×1 卷积调整通道数。为了保证输入与输出在高宽上保持一致,这四条路径都使用了适当的填充(padding)。最后,将四条路径的输出在通道维度上拼接,形成 Inception 块的最终输出。在实际应用中,Inception 块中可调节的主要超参数是每条路径的输出通道数。
2 网络结构
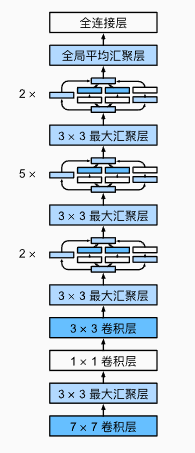
如图 所示,GoogLeNet 由 9 个 Inception 块堆叠而成,并在末端接入全局平均池化层来生成最终的预测结果。在 Inception 块之间插入的最大池化层不仅能够有效降低特征图的空间维度,还能增强网络的平移不变性。
网络的前几层类似于 AlexNet 和 LeNet,用于提取低级特征;而 Inception 块的堆叠则继承了 VGG 的思路,通过多层组合实现深层特征抽象。值得注意的是,GoogLeNet 采用全局平均池化替代传统全连接层,不仅显著减少了参数量,也降低了过拟合的风险,从而使网络在保持高精度的同时更加高效。
此外,为了缓解梯度消失问题,网络在中间层还引入了辅助分类器,它们在训练阶段提供额外监督,但在推理阶段被舍弃,以保证最终预测的稳定性。
3 代码实现
这里的代码以DIVE INTO DEEP INEARING为示例代码,需要提前将环境配置好
3.1 定义Inception
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l
class Inception(nn.Module):
# c1--c4是每条路径的输出通道数
def __init__(self, in_channels, c1, c2, c3, c4, **kwargs):
super(Inception, self).__init__(**kwargs)
# 线路1,单1x1卷积层
self.p1_1 = nn.Conv2d(in_channels, c1, kernel_size=1)
# 线路2,1x1卷积层后接3x3卷积层
self.p2_1 = nn.Conv2d(in_channels, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# 线路3,1x1卷积层后接5x5卷积层
self.p3_1 = nn.Conv2d(in_channels, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# 线路4,3x3最大汇聚层后接1x1卷积层
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_channels, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
# 在通道维度上连结输出
return torch.cat((p1, p2, p3, p4), dim=1)
3.2 定义五个块
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b2 = nn.Sequential(nn.Conv2d(64, 64, kernel_size=1),
nn.ReLU(),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b3 = nn.Sequential(Inception(192, 64, (96, 128), (16, 32), 32),
Inception(256, 128, (128, 192), (32, 96), 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b4 = nn.Sequential(Inception(480, 192, (96, 208), (16, 48), 64),
Inception(512, 160, (112, 224), (24, 64), 64),
Inception(512, 128, (128, 256), (24, 64), 64),
Inception(512, 112, (144, 288), (32, 64), 64),
Inception(528, 256, (160, 320), (32, 128), 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b5 = nn.Sequential(Inception(832, 256, (160, 320), (32, 128), 128),
Inception(832, 384, (192, 384), (48, 128), 128),
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten())
net = nn.Sequential(b1, b2, b3, b4, b5, nn.Linear(1024, 10))
3.3 打印网络结构
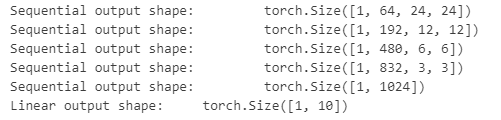
X = torch.rand(size=(1, 1, 96, 96))
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape:\t', X.shape)
3.4 定义评估函数
def evaluate_accuracy_gpu(net, data_iter, device=None): #@save
"""使用GPU计算模型在数据集上的精度"""
if isinstance(net, nn.Module):
net.eval() # 设置为评估模式
if not device:
device = next(iter(net.parameters())).device
# 正确预测的数量,总预测的数量
metric = d2l.Accumulator(2)
with torch.no_grad():
for X, y in data_iter:
if isinstance(X, list):
# BERT微调所需的(之后将介绍)
X = [x.to(device) for x in X]
else:
X = X.to(device)
y = y.to(device)
metric.add(d2l.accuracy(net(X), y), y.numel())
return metric[0] / metric[1]
3.5 定义训练函数
def train_ch6(net,train_iter,test_iter,num_epochs,lr,device):
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
nn.init.xavier_uniform_(m.weight)
net.apply(init_weights)
print("devices on :",device)
net.to(device)
optimizer = torch.optim.SGD(net.parameters(),lr=lr) # 获取需要更新的参数
loss = nn.CrossEntropyLoss() # 交叉熵损失函数,先用softmax取值,取得负对数得到损失值
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_iter)
for epoch in range(num_epochs):
metric = d2l.Accumulator(3)
net.train()
for i,(X,y) in enumerate(train_iter):
timer.start()
optimizer.zero_grad()
X, y = X.to(device), y.to(device)
y_hat = net(X)
l = loss(y_hat,y)
l.backward()
optimizer.step()
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0]/metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, '
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {str(device)}')
3.5 定义数据集
如果已经下载好数据集后,修改数据集的root的位置即可,但是如果没有下载过,需要将doenload设置为TRUE
from torch.nn.modules import transformer
from torchvision import datasets,transforms
from torch.utils.data import DataLoader
transform = transforms.Compose([
transforms.Resize((224,224)),
transforms.ToTensor()
])
# 加载训练集
train_dataset = datasets.MNIST(
root='../../dataset/mnist/train',
train=True,
transform=transform,
download=False # 已经在本地
)
# 加载测试集
test_dataset = datasets.MNIST(
root='../../dataset/mnist/test',
train=False,
transform=transform,
download=False
)
train_iter = DataLoader(train_dataset,batch_size=batch_size)
test_iter = DataLoader(test_dataset,batch_size=batch_size)
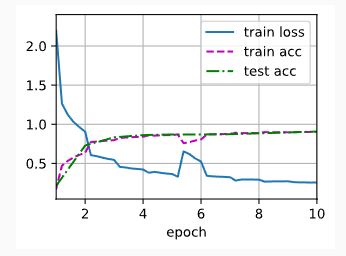
3.6 开始训练
lr, num_epochs, batch_size = 0.1, 10, 128
d2l.train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
4 GoogLeNet 的优势
- 高性能、低参数:相比 VGGNet,参数量少了十倍,但精度更高。
- 多尺度特征提取:Inception 模块能同时处理不同尺度信息。
- 训练稳定:辅助分类器帮助梯度传播,深层网络不容易退化。
参考
[1] https://zh-v2.d2l.ai/chapter_convolutional-modern/googlenet.html

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









