






一、打开matlab程序
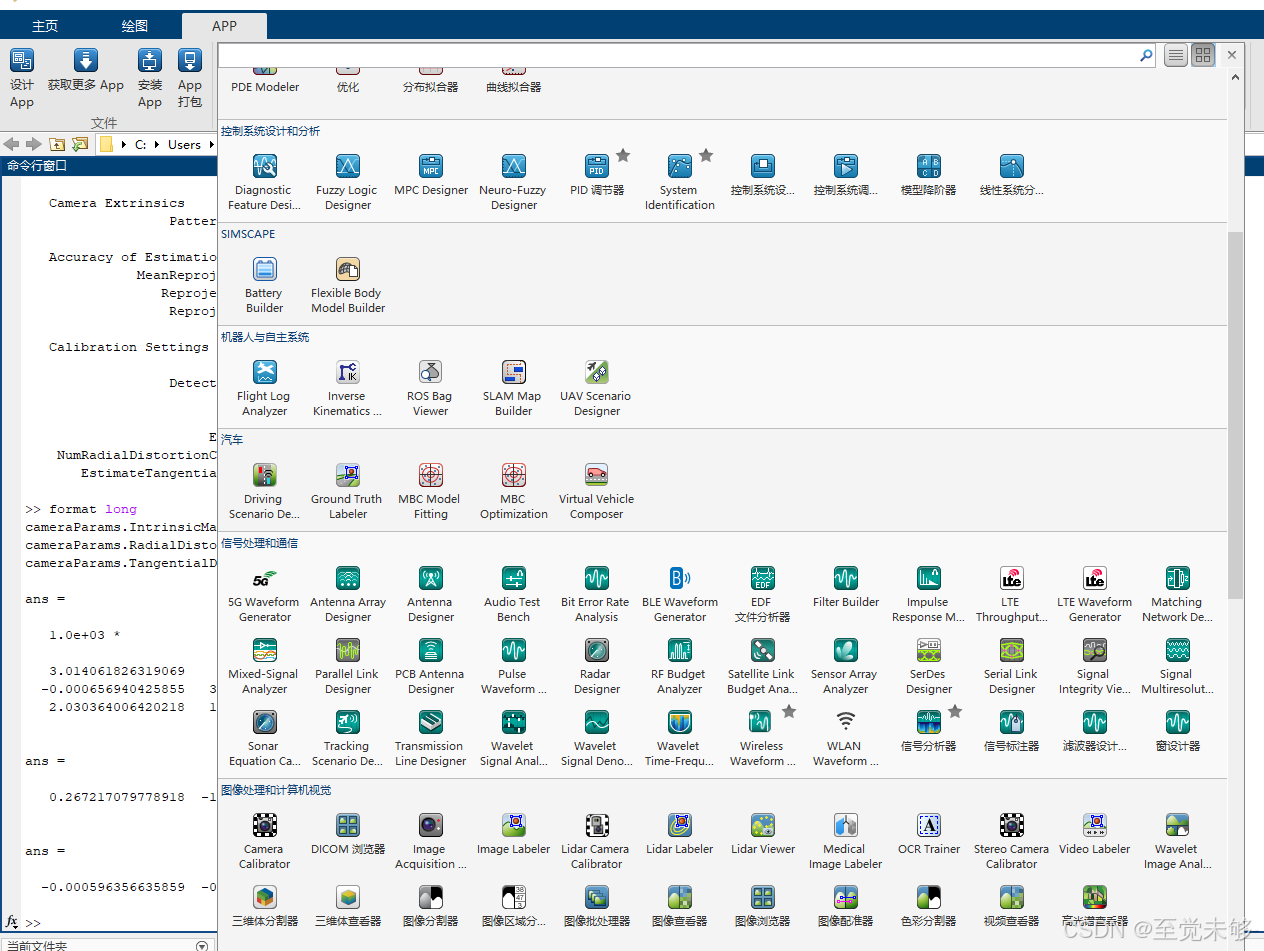
二、点击顶部APP选项中,找到“图像处理与计算机软件”的第一个图标“Camera Calibrator",点击打开。
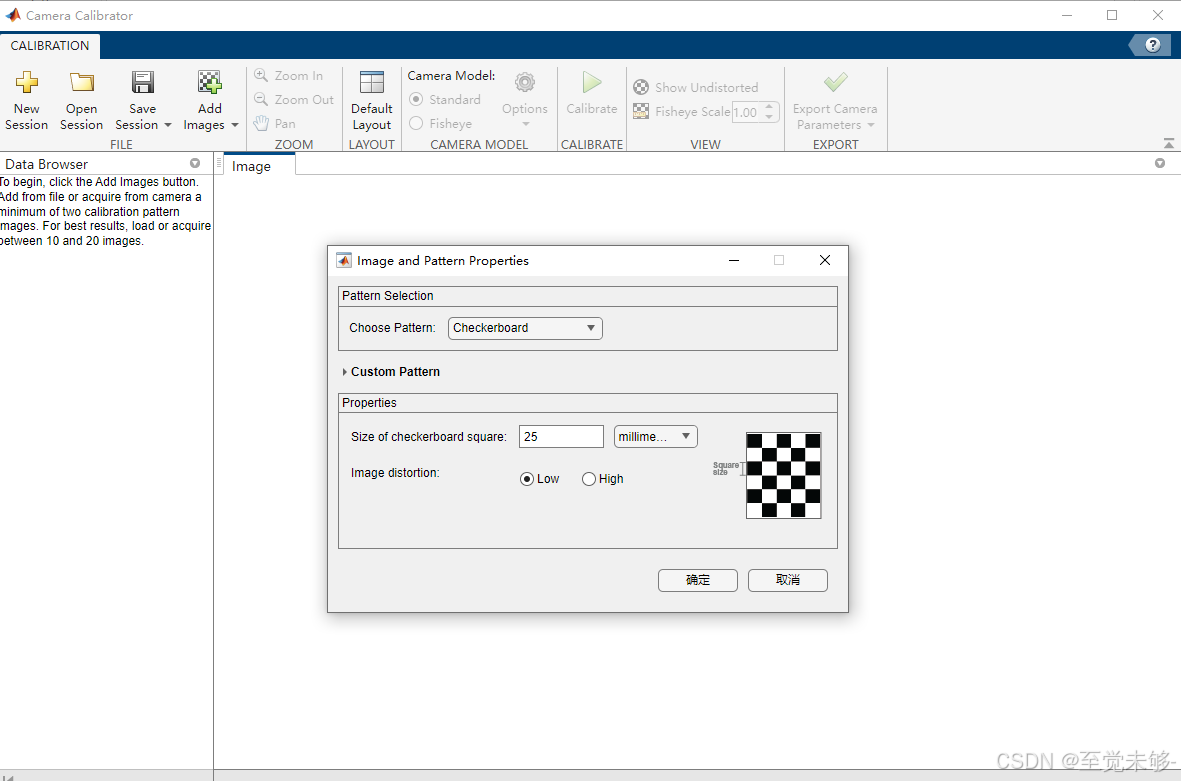
三、打开后,点击Add Images,添加图片,弹出窗口选择棋盘格尺寸
 四、点击Options,勾选3Coefficients、Skew、Tangential Distortion。
四、点击Options,勾选3Coefficients、Skew、Tangential Distortion。
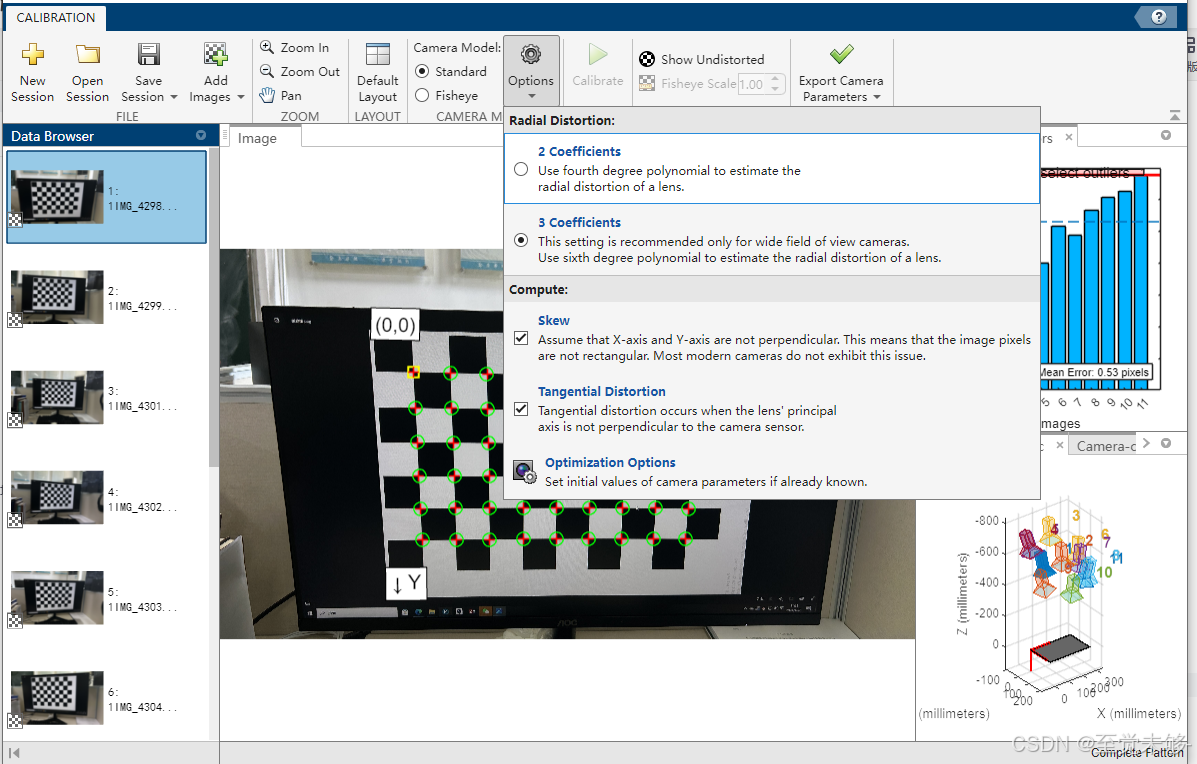
五、然后点击Calibrate
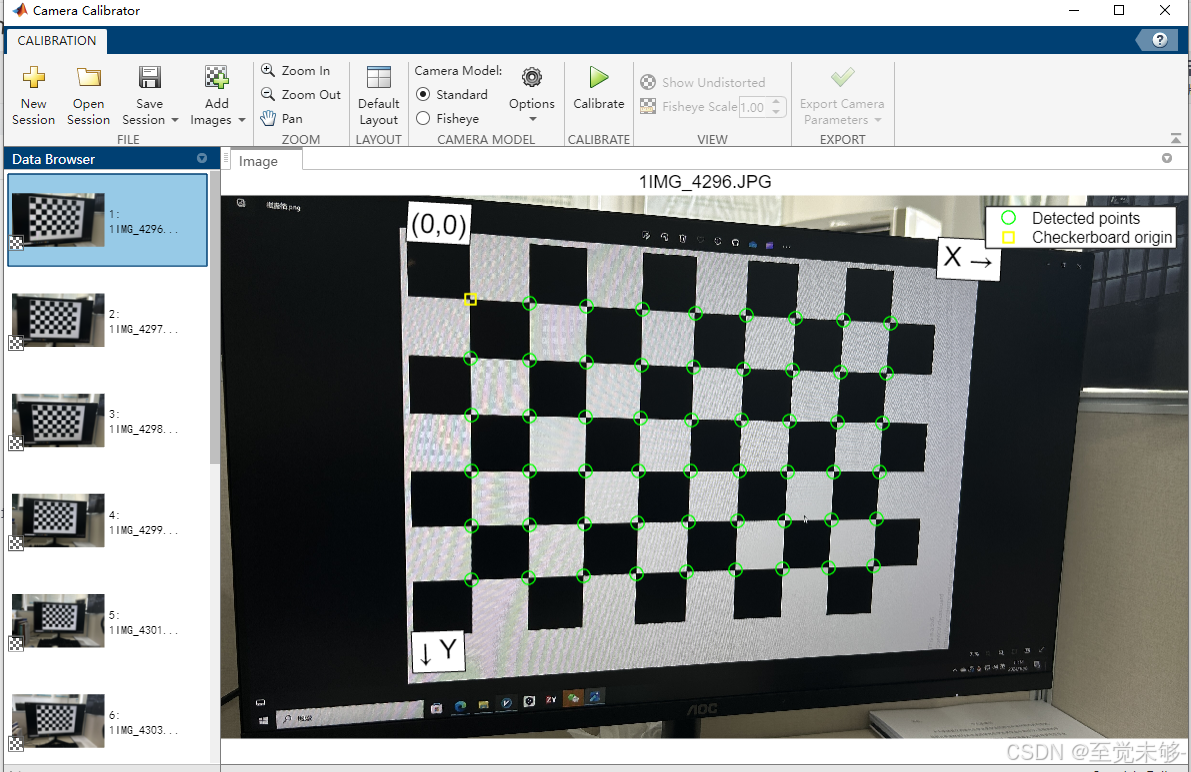
六、删除误差较大的图片、右键选择图片。移除图片
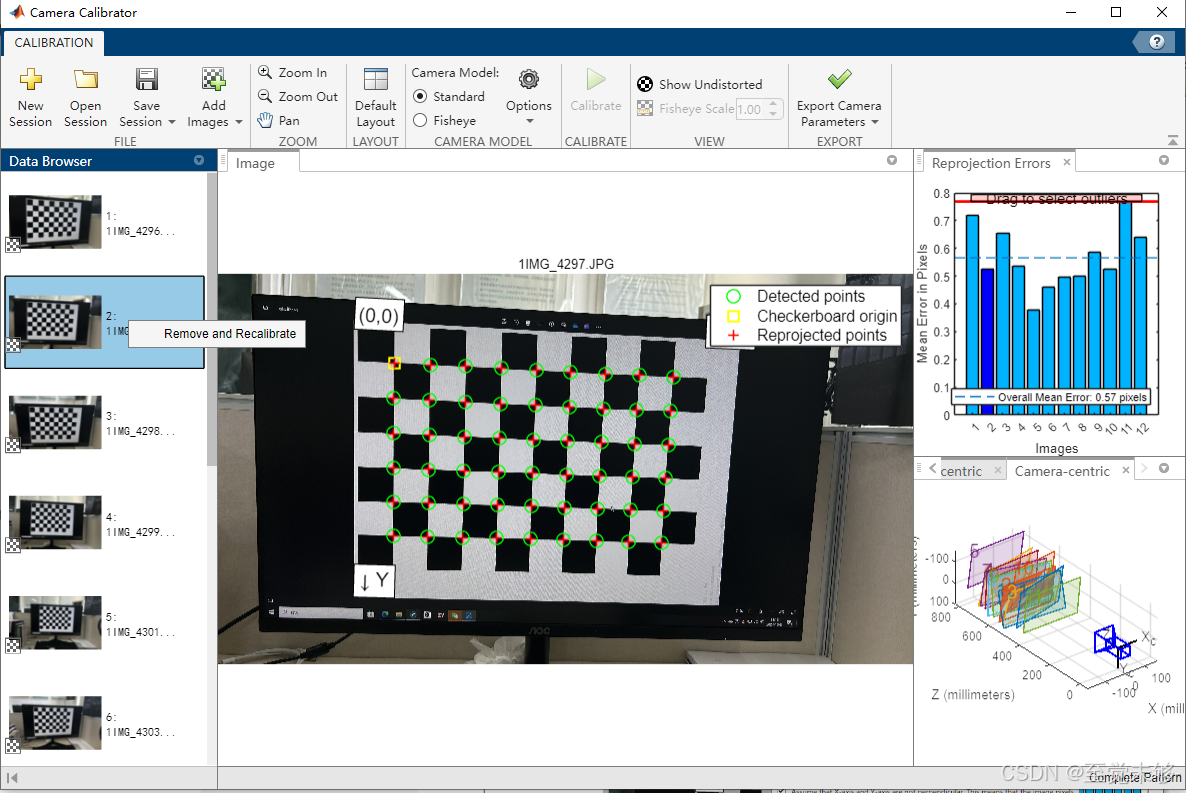
七、点击Export camera parameters,弹出窗口,点击确定

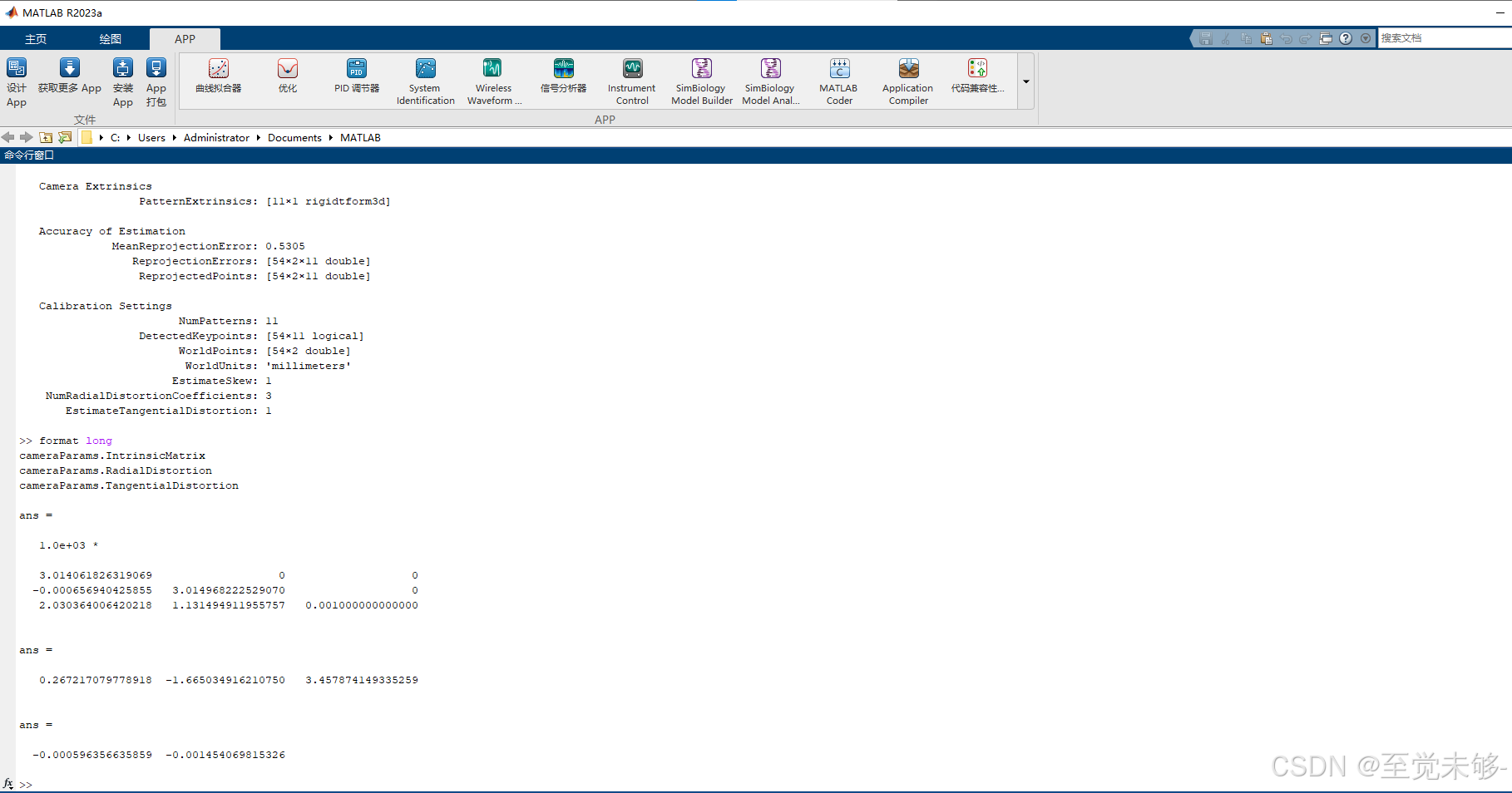
八、回到matlab主页,输入一下代码,回车得到相机的参数
format long
cameraParams.IntrinsicMatrix
cameraParams.RadialDistortion
cameraParams.TangentialDistortion
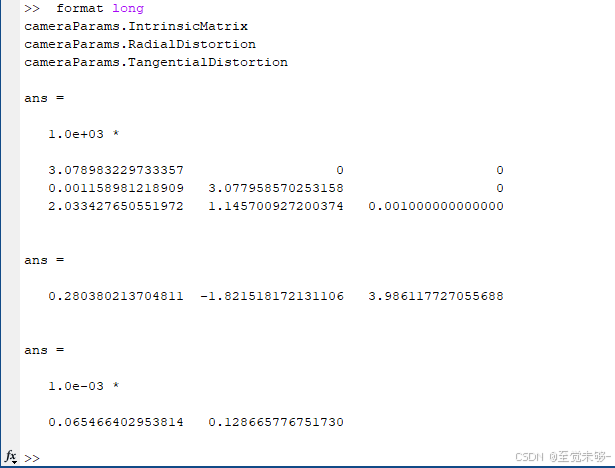
十、内参乘以1000倍,就是最终结果

















 3875
3875

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









