







一说到关系型数据库,我总感觉缺了点什么。如果你尝试透过“关系型数据库是如何运作的”的关键词句来进行搜索,其搜索结果是少量的而且内容是简短的。难道说是由于它已经太老旧而已经不再流行吗?
作为一名开发者,我讨厌使用我不明白的技术。此外,关系型数据库已经使用超40年,肯定有它过人的原因。因此,我花了大量时间来想真正弄懂它里面如同黑盒子那样的奥秘。关系型数据库实际上是非常有趣的,因为它是基于实用和复用的概念。但是限于篇幅,以下我将把重点放在数据库如何处理SQL查询的问题上。本文内容大致划分为以下三部分:
1.低阶数据库和高级数据库组成概述
2.查询优化流程的处理概述
3.事务和缓冲池管理概述
基本概念回顾
在编程年代早期,开发者是必须要理解清楚自己所进行操作的原理的。他们对于所使用的算法和数据结果是了然于胸的,因为他们很注重在计算机配置较低时于CPU和内存上的开销。在这一节,我首先要介绍的是数据库索引。
O(1) vs O(n2)
时间复杂度用于计算算法处理数据的用时。科学家使用大O表示法来进行时间复杂度描述,其定义是对于输入的数据算法需要进行多少步运算。这里要强调的是,它的核心是数据量增加对运算增加的影响而不是数据量的多少。时间复杂度不会直接给出精确的运算步数,而是以趋势的方式展示。
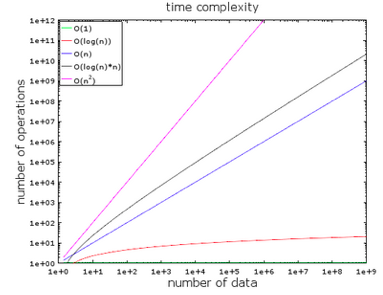
在上图中,你可以看到不同复杂度的发展趋势,我使用的方法是对数法。换言之,数据量将会从1快速地增加到10亿。我们可以得出以下结论:
- O(1)或常数复杂度是维持不变的
- O(log(n))在处理10亿数据量时也维持与一个较低复杂度水平
- O(n2)复杂度增长最快
- 其余两种复杂度位于中游
举例说明
如果是处理少量数据,O(1)和O(n2)的差别是不明显的。例如是2000个运算元素:
- O(1) 的运算量是1
- O(log(n)) 的运算量是7
- O(n) 的运算量是2000
- O(n*log(n)) 的运算量是14000
- O(n2) 的运算量是4 000 000
尽管O(1) 和 O(n2)的运算量的差距是4百万,但是这仅需2ms,也就是眨眼的功夫。此外,如果使用的是多核处理器,其运算速度会更快。所以性能和优化问题在现在的重视程度无法跟以往相比。
如果处理的数据量是1 000 000,其结果又会如何呢?
- O(1) 的运算量是1
- O(log(n)) 的运算量是14
- O(n) 的运算量是1 000 000
- O(n*log(n)) 的运算量是14 000 000
- O(n2) 的运算量是1 000 000 000 000
这样一来,你可以先喝杯咖啡休息下再回来看结果了!如果再加个0,你可以先进行午休了!
进一步说明
这里有几点提示:
在一个完整hash表中进行一次搜索会提交一个元素给O(1)
在一个全平衡树种进行一次搜索会提交一个结果给O(log(n))
在一个数组中进行一次搜索会提交一个结果给O(n)
最优排序算法的时间复杂度与O(n*log(n))相当
低效排序算法的时间复杂度与 O(n2)相当
注意:具体算法和数据结果会在本文稍后列示
时间复杂度的类型有:
- 平均事件场合
- 最佳时间场合
- 最差时间场合
时间复杂度通常是最差时间场合。除了时间复杂度,复杂度还可以用来表示内存使用和磁碟I/O占用情况等。诚然,比n2更复杂的计算有n4,3n,nn 。
合并排序
如果你要对一个集合进行排序该如何做呢?什么?使用sort()?听起来是个好的答案。
但如果排序对象是一个数据库,你就务必知道sort()的工作原理。这里我介绍排序算法中最重要的一种:合并排序。对合并排序理解透彻,一方面可以掌握如何进行查询优化,二来可以更好地理解本文稍后说到的合并join运算。
合并(Merge)
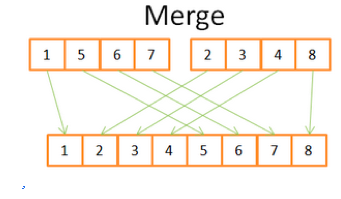
合并排序的运算过程是:合并两个已排序的N/2数组到一个已排序N个元素数组,例如下图所示:
以上是本系列文的上篇,更多内容请关注后续文章,后续内容简述:全局概念,客户管理器,查询管理器,数据管理器。
此前,CSDN发布了《关系型数据库是如何运作的(上)》深受开发者朋友们的欢迎,本文是完结篇,内容涉及数据库总体架构,客户端管理器,查询管理器,数据管理器介绍等。
总体架构
前述文章从比较细的角度来讨论了数据库,现在我们尝试从宏观角度来分析。
数据库的核心组件:
-
过程管理器(The process manager):数据库都会有一个过程池/线程池需要进行管理。此外,为了使运行时间更短,现代数据库会使用自己的线程来替代操作系统线程。
-
网络管理器(The network manager):网络的输入输出是个大问题,特别是对于分布式数据库来说。所以部分数据库针对网络管理打造了自己的管理器。
-
文件系统管理器(File system manager):磁碟I/O是数据库的第一瓶颈。使用管理器进行磁碟文件进行管理是很重要的。
-
内存管理器(Memory manager):当你需要处理大量内存数据或大量查询,一个高效的内存管理器是必须的。
-
安全管理器(Security manager):进行认证和用户认证管理。
-
客户端管理器(Client manager):进行客户端连接管理
数据库的工具:
备份管理器:进行数据库的备份与恢复
复原管理器:在数据库崩溃后进行数据库重启
监视管理器:进行数据库活动日志记录,同时进行数据库监视
管理员管理器:进行metadata存储,管理数据库,表空间,数据泵等
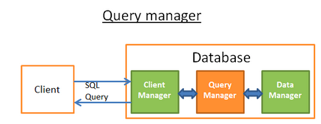
查询管理器:对查询进行有效性检验,优化,编译和执行
数据管理器:包括事务管理器,缓存管理器,数据访问管理器
下面将详细介绍客户端管理器,查询管理器以及数据管理器。
客户端管理器
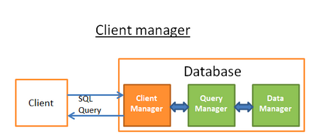
客户端管理器用于处理和管理客户端的通信。客户端可以是一台服务器或是终端应用。客户端管理器透过不同的API来提供访问权,例如:JDBC,ODBC,OLE-DB等。
当你连接到一个数据库时:
- 管理器会对你的身份和授权进行确认。
- 如果验证通过,会对你的查询请求进行处理。
- 管理器同时会检查数据库是否处于满负荷状态。
- 管理器会等待请求资源的返回。如果发生超时,它会关闭连接并返回可读的错误信息。
- 然后会把你的查询发送给查询管理器,而你的查询是被处理状态。
- 管理器会存储部分结果到缓冲区然后开始进行结果返回。
- 如果出现异常,管理器会中断连接,返回相关原因解释并释放资源。
查询管理器
查询管理器是数据库的重要组成部分。其工作过程是:
- 查询会被解释以确认有效性
- 然后会被重写以消除不必要的操作并进行预优化处理
- 然后会被优化处理以提高性能并发送到执行和数据访问计划
- 然后改计划会被编译处理
- 最后进行执行查询
查询重写器的运作
重写器的目的是:
- 进行查询预优化处理
- 避免不必要的操作
- 帮助优化器找出最佳方案
常见的重写规则:
视图合并:如果你在查询中使用了视图,那么该视图会被转换层SQL视图代码
子查询扁平化:子查询使查询优化变得困难,因此重写器会修改含有子查询的查询以消除子查询。
例如:
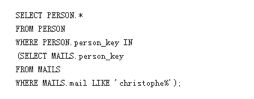
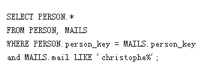
会被重写为:
消除不必要的操作符:例如当你使用了UNIQUE唯一约束而同时使用了DISTINCT操作符,那么DISTINCT将会被消除。
多于JOIN连接清除:当你 有两次相同条件的JOIN连接但是其中一个条件被隐藏了或者是一个多于的JOIN,那么它会被清除。
分区处理:如果你使用了一个分区表,那么重写器会找出那个分区会被使用。
自定义规则:如果你有自定义的查询规则,重写器会执行这些规则。
数据管理器
查询管理器的作用是执行查询并对资源发出请求,数据管理器会处理这些请求并返回结果。但这里有两个问题:
- 关系数据库使用的是事务模型。所以你有可能得不到数据,因为其他人可能会正同时使用/修改这些数据。
- 数据获取是数据库中最慢的操作,因此数据管理必须要能高效地获取并数据存放在内存缓冲区。
那么关系数据库是如何解决这两个问题的呢?
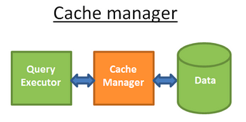
缓存管理器
如前所述,数据库的主要瓶颈是磁碟I/O。所以现代数据库使用了缓存管理器来提高效率。
查询执行器的数据请求对象是缓存管理器而不是直接的文件系统。缓存管理器有一个内存里缓存叫做缓冲池。从内存获取数据会大大提高数据库速度。
缓冲–替换策略
很多主流数据库(如:SQL Server,MySQL,Oracle等)使用的是LRU算法。
LRU是Least Recently Used的简写,意思最近使用。其理念是缓存最近使用的数据以便再次使用时快速读取。
虽然它有很多优点但也存在不足,比方说表/索引的大小超过了缓冲区大小。因此出现了进阶版本的LRU,这就是LRU-K,例如在SQL Server 使用的是LRU-K,K=2。在LRU-K中:
- 首先考虑数据的K次最近使用记录;根据数据的使用次数分配权值;如果有新的数组载入缓存,旧的但经常使用的数据不会被移除,但是当旧数据不再使用,将会被移除,所以权值的设立有助于减少多余数据。
事务管理器
事务管理器是为了确保每个查询会执行自己的事务。在讲述事务管理期前,我们需要理解ACID事务的概念。
ACID是一个工作单元,它的意思是:
Atomicity(原子性):事务是”全或全不”的,即使是10个小时的事务。如果事务崩溃了,会发生状态回滚。
Isolation(隔离性):如果事务A和B同时运行,那么事务A和B的结果必须是一致的,不论A对于B是完成前/完成后/过程中的状态。
Durability(耐久性):一旦事务完成,数据会存放在数据库中而不论发生什么情况(异常或错误)。
Consistency(一致性):只有有效数据被写入数据库。一致性与原子行和隔离性关联。
并发控制
确保隔离性,附着性和原子性的关键是能对同一数据进行正确写操作(添加,更新和删除):
如果仅仅是数据读取事务,那么它们可以不与其它修改事务发生冲突;
如果一个修改事务处理的数据被其它事务读取,数据库需要找到方法来隐藏这些修改操作。同时,它需要保证这些修改操作不会被清除。
以上问题就是并发控制。最简单的处理方法是逐个执行事务。但是这不利于进行规模扩张,也无法发挥服务器/CPU的多核性能。理想的处理方式是每当事务新建或取消时:
监视所有事务的全部操作,检查同时读取/修改相同数据的两个(或多个)事务是否发生冲突
,在发生冲突的事务中进行操作记录以减少冲突部分的大小,把冲突部分以其它次序进行处理,判别某事务是否可以取消
更正规的做法是进行冲突日程表管理。但是在企业级数据库中,是很难为每个新事务事件分配足够多的处理时间。所以会使用其它方法来进行处理。
锁管理器
为了处理以上问题,多数数据库会采用锁或数据版本来进行处理。但这是个内容丰富的话题,以下会把讨论重点放在锁部分。
什么是锁呢?
- 事务是否需要数据
- 是否锁定了数据
- 另一事务是否需要相同数据
- 是否不得不等待直至第一个事务释放这些数据
这叫做排斥锁。但是排斥锁针对的对象相同数据的读取和等待,这是不利于资源调配的。还有一种锁,叫共享锁。
在共享锁中:
- 一个事务是否只需读取数据A
- 共享锁对数据锁定并读取数据
- 如果第二个事务也只需要读取数据A
- 共享锁对数据锁定并读取数据
- 如果第三个事务只需要修改数据A
- 那么会对数据进行排斥锁锁定,但它必须等待直至事务一,二释放共享锁才对数据A进行排斥锁锁定
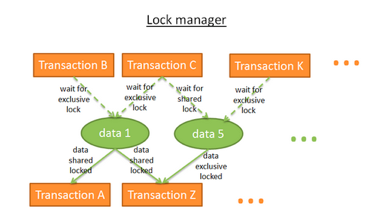
锁管理器的作用是提供和释放锁。从内部角度看,它把锁存储在一个有关联的hash数据表中。
- 哪些事务锁定了数据
- 哪些事务在等待数据
死锁
锁的存在会导致一个问题:两个事务在无限期地等待数据:
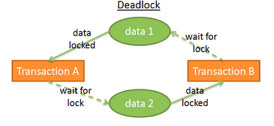
在上图中:
- 事务A对数据1使用了排斥锁,同时在等待获取数据2
- 事务B对数据2使用了排斥是,同时在等待获取数据1
这就是死锁。
遇到死锁后,锁管理器会选择对哪个事务进行撤销(回滚)以消除死锁。但要进行选择,并不是件容易的事。DB2和SQL Sever使用了两段锁协议(Two-Phase Locking Protocol)来进行处理。
- 在增长段,事务会得到锁,但是不能释放锁。
- 在下降段,事务可释放锁,但是不能得到锁。
其核心理念是:
- 释放不再使用的锁以减少其他事务对这些锁的等待时间
- 避免事务开始后对数据进行修改,所以这是非连贯事务
写在最后
我一直所坚持的习惯是:明白你所使用的技术,如果你想不断提升自己的开发水平,尝试深入掌握你所使用的工具的原理是个大有裨益的方法。虽然NoSQL在现今很流行,但是它们还是属于发展初期,一些特定的问题或重要思想还是得借助关系数据库才能彻底弄懂。
When it comes to relational databases, I can’t help thinking that something is missing. They’re used everywhere. There are many different databases: from the small and useful SQLite to the powerful Teradata. But, there are only a few articles that explain how a database works. You can google by yourself “how does a relational database work” to see how few results there are. Moreover, those articles are short. Now, if you look for the last trendy technologies (Big Data, NoSQL or JavaScript), you’ll find more in-depth articles explaining how they work.
Are relational databases too old and too boring to be explained outside of university courses, research papers and books?

As a developer, I HATE using something I don’t understand. And, if databases have been used for 40 years, there must be a reason. Over the years, I’ve spent hundreds of hours to really understand these weird black boxes I use every day. Relational Databases are very interesting because they’re based on useful and reusable concepts. If understanding a database interests you but you’ve never had the time or the will to dig into this wide subject, you should like this article.
Though the title of this article is explicit, the aim of this article is NOT to understand how to use a database. Therefore, you should already know how to write a simple join query and basic CRUD queries; otherwise you might not understand this article. This is the only thing you need to know, I’ll explain everything else.
I’ll start with some computer science stuff like time complexity. I know that some of you hate this concept but, without it, you can’t understand the cleverness inside a database. Since it’s a huge topic, I’ll focus on what I think is essential: the way a database handles an SQL query. I’ll only present the basic concepts behind a database so that at the end of the article you’ll have a good idea of what’s happening under the hood.
Since it’s a long and technical article that involves many algorithms and data structures, take your time to read it. Some concepts are more difficult to understand; you can skip them and still get the overall idea.
For the more knowledgeable of you, this article is more or less divided into 3 parts:
- An overview of low-level and high-level database components
- An overview of the query optimization process
- An overview of the transaction and buffer pool management
Contents [show]
Back to basics
A long time ago (in a galaxy far, far away….), developers had to know exactly the number of operations they were coding. They knew by heart their algorithms and data structures because they couldn’t afford to waste the CPU and memory of their slow computers.
In this part, I’ll remind you about some of these concepts because they are essential to understand a database. I’ll also introduce the notion of database index.
O(1) vs O(n2)
Nowadays, many developers don’t care about time complexity … and they’re right!
But when you deal with a large amount of data (I’m not talking about thousands) or if you’re fighting for milliseconds, it becomes critical to understand this concept. And guess what, databases have to deal with both situations! I won’t bore you a long time, just the time to get the idea. This will help us later to understand the concept of cost based optimization.
The concept
The time complexity is used to see how long an algorithm will take for a given amount of data. To describe this complexity, computer scientists use the mathematical big O notation. This notation is used with a function that describes how many operations an algorithm needs for a given amount of input data.
For example, when I say “this algorithm is in O( some_function() )”, it means that for a certain amount of data the algorithm needs some_function(a_certain_amount_of_data) operations to do its job.
What’s important is not the amount of data but the way the number of operations increases when the amount of data increases. The time complexity doesn’t give the exact number of operations but a good idea.

In this figure, you can see the evolution of different types of complexities. I used a logarithmic scale to plot it. In other words, the number of data is quickly increasing from 1 to 1 billion. We can see that:
- The O(1) or constant complexity stays constant (otherwise it wouldn’t be called constant complexity).
- The O(log(n)) stays low even with billions of data.
- The worst complexity is the O(n2) where the number of operations quickly explodes.
- The two other complexities are quickly increasing.
Examples
With a low amount of data, the difference between O(1) and O(n2) is negligible. For example, let’s say you have an algorithm that needs to process 2000 elements.
- An O(1) algorithm will cost you 1 operation
- An O(log(n)) algorithm will cost you 7 operations
- An O(n) algorithm will cost you 2 000 operations
- An O(n*log(n)) algorithm will cost you 14 000 operations
- An O(n2) algorithm will cost you 4 000 000 operations
The difference between O(1) and O(n2) seems a lot (4 million) but you’ll lose at max 2 ms, just the time to blink your eyes. Indeed, current processors can handle hundreds of millions of operations per second. This is why performance and optimization are not an issue in many IT projects.
As I said, it’s still important to know this concept when facing a huge number of data. If this time the algorithm needs to process 1 000 000 elements (which is not that big for a database):
- An O(1) algorithm will cost you 1 operation
- An O(log(n)) algorithm will cost you 14 operations
- An O(n) algorithm will cost you 1 000 000 operations
- An O(n*log(n)) algorithm will cost you 14 000 000 operations
- An O(n2) algorithm will cost you 1 000 000 000 000 operations
I didn’t do the math but I’d say with the O(n2) algorithm you have the time to take a coffee (even a second one!). If you put another 0 on the amount of data, you’ll have the time to take a long nap.
Going deeper
To give you an idea:
- A search in a good hash table gives an element in O(1)
- A search in a well-balanced tree gives a result in O(log(n))
- A search in an array gives a result in O(n)
- The best sorting algorithms have an O(n*log(n)) complexity.
- A bad sorting algorithm has an O(n2) complexity
Note: In the next parts, we’ll see these algorithms and data structures.
There are multiple types of time complexity:
- the average case scenario
- the best case scenario
- and the worst case scenario
The time complexity is often the worst case scenario.
I only talked about time complexity but complexity also works for:
- the memory consumption of an algorithm
- the disk I/O consumption of an algorithm
Of course there are worse complexities than n2, like:
- n4: that sucks! Some of the algorithms I’ll mention have this complexity.
- 3n: that sucks even more! One of the algorithms we’re going to see in the middle of this article has this complexity (and it’s really used in many databases).
- factorial n : you’ll never get your results, even with a low amount of data.
- nn: if you end-up with this complexity, you should ask yourself if IT is really your field…
Note: I didn’t give you the real definition of the big O notation but just the idea. You can read this article on Wikipedia for the real (asymptotic) definition.
Merge Sort
What do you do when you need to sort a collection? What? You call the sort() function … ok, good answer… But for a database you have to understand how this sort() function works.
There are several good sorting algorithms so I’ll focus on the most important one: the merge sort. You might not understand right now why sorting data is useful but you should after the part on query optimization. Moreover, understanding the merge sort will help us later to understand a common database join operation called the merge join.
Merge
Like many useful algorithms, the merge sort is based on a trick: merging 2 sorted arrays of size N/2 into a N-element sorted array only costs N operations. This operation is called a merge.
Let’s see what this means with a simple example:

You can see on this figure that to construct the final sorted array of 8 elements, you only need to iterate one time in the 2 4-element arrays. Since both 4-element arrays are already sorted:
- 1) you compare both current elements in the 2 arrays (current=first for the first time)
- 2) then take the lowest one to put it in the 8-element array
- 3) and go to the next element in the array you took the lowest element
- and repeat 1,2,3 until you reach the last element of one of the arrays.
- Then you take the rest of the elements of the other array to put them in the 8-element array.
This works because both 4-element arrays are sorted and therefore you don’t need to “go back” in these arrays.
Now that we’ve understood this trick, here is my pseudocode of the merge sort.
array mergeSort(array a)
if
(length(a)==
1
)
return
a[
0
];
end
if
//recursive calls
[left_array right_array] := split_into_2_equally_sized_arrays(a);
array new_left_array := mergeSort(left_array);
array new_right_array := mergeSort(right_array);
//merging the 2 small ordered arrays into a big one
array result := merge(new_left_array,new_right_array);
return
result;
|
The merge sort breaks the problem into smaller problems then finds the results of the smaller problems to get the result of the initial problem (note: this kind of algorithms is called divide and conquer). If you don’t understand this algorithm, don’t worry; I didn’t understand it the first time I saw it. If it can help you, I see this algorithm as a two-phase algorithm:
- The division phase where the array is divided into smaller arrays
- The sorting phase where the small arrays are put together (using the merge) to form a bigger array.
Division phase

During the division phase, the array is divided into unitary arrays using 3 steps. The formal number of steps is log(N) (since N=8, log(N) = 3).
How do I know that?
I’m a genius! In one word: mathematics. The idea is that each step divides the size of the initial array by 2. The number of steps is the number of times you can divide the initial array by two. This is the exact definition of logarithm (in base 2).
Sorting phase

In the sorting phase, you start with the unitary arrays. During each step, you apply multiple merges and the overall cost is N=8 operations:
- In the first step you have 4 merges that cost 2 operations each
- In the second step you have 2 merges that cost 4 operations each
- In the third step you have 1 merge that costs 8 operations
Since there are log(N) steps, the overall costs N * log(N) operations.
The power of the merge sort
Why this algorithm is so powerful?
Because:
- You can modify it in order to reduce the memory footprint, in a way that you don’t create new arrays but you directly modify the input array.
Note: this kind of algorithms is called in-place.
- You can modify it in order to use disk space and a small amount of memory at the same time without a huge disk I/O penalty. The idea is to load in memory only the parts that are currently processed. This is important when you need to sort a multi-gigabyte table with only a memory buffer of 100 megabytes.
Note: this kind of algorithms is called external sorting.
- You can modify it to run on multiple processes/threads/servers.
For example, the distributed merge sort is one of the key components of Hadoop (which is THE framework in Big Data).
- This algorithm can turn lead into gold (true fact!).
This sorting algorithm is used in most (if not all) databases but it’s not the only one. If you want to know more, you can read this research paper that discusses the pros and cons of the common sorting algorithms in a database.
Array, Tree and Hash table
Now that we understand the idea behind time complexity and sorting, I have to tell you about 3 data structures. It’s important because they’re the backbone of modern databases. I’ll also introduce the notion of database index.
Array
The two-dimensional array is the simplest data structure. A table can be seen as an array. For example:

This 2-dimensional array is a table with rows and columns:
- Each row represents a subject
- The columns the features that describe the subjects.
- Each column stores a certain type of data (integer, string, date …).
Though it’s great to store and visualize data, when you need to look for a specific value it sucks.
For example, if you want to find all the guys who work in the UK, you’ll have to look at each row to find if the row belongs to the UK. This will cost you N operations (N being the number of rows) which is not bad but could there be a faster way? This is where trees come into play.
Note: Most modern databases provide advanced arrays to store tables efficiently like heap-organized tables or index-organized tables. But it doesn’t change the problem of fast searching for a specific condition on a group of columns.
Tree and database index
A binary search tree is a binary tree with a special property, the key in each node must be:
- greater than all keys stored in the left sub-tree
- smaller than all keys stored in the right sub-tree
Let’s see what it means visually
The idea

This tree has N=15 elements. Let’s say I’m looking for 208:
- I start with the root whose key is 136. Since 136<208, I look at the right sub-tree of the node 136.
- 398>208 so, I look at the left sub-tree of the node 398
- 250>208 so, I look at the left sub-tree of the node 250
- 200<208 so, I look at the right sub-tree of the node 200. But 200 doesn’t have a right subtree,the value doesn’t exist (because if it did exist it would be in the right subtree of 200)
Now let’s say I’m looking for 40
- I start with the root whose key is 136. Since 136>40, I look at the left sub-tree of the node 136.
- 80>40 so, I look at the left sub-tree of the node 80
- 40= 40, the node exists. I extract the id of the row inside the node (it’s not in the figure) and look at the table for the given row id.
- Knowing the row id let me know where the data is precisely on the table and therefore I can get it instantly.
In the end, both searches cost me the number of levels inside the tree. If you read carefully the part on the merge sort you should see that there are log(N) levels. So the cost of the search is log(N), not bad!
Back to our problem
But this stuff is very abstract so let’s go back to our problem. Instead of a stupid integer, imagine the string that represents the country of someone in the previous table. Suppose you have a tree that contains the column “country” of the table:
- If you want to know who is working in the UK
- you look at the tree to get the node that represents the UK
- inside the “UK node” you’ll find the locations of the rows of the UK workers.
This search only costs you log(N) operations instead of N operations if you directly use the array. What you’ve just imagined was a database index.
You can build a tree index for any group of columns (a string, an integer, 2 strings, an integer and a string, a date …) as long as you have a function to compare the keys (i.e. the group of columns) so that you can establish an order among the keys (which is the case for any basic types in a database).
B+Tree Index
Although this tree works well to get a specific value, there is a BIG problem when you need to get multiple elements between two values. It will cost O(N) because you’ll have to look at each node in the tree and check if it’s between these 2 values (for example, with an in-order traversal of the tree). Moreover this operation is not disk I/O friendly since you’ll have to read the full tree. We need to find a way to efficiently do a range query. To answer this problem, modern databases use a modified version of the previous tree called B+Tree. In a B+Tree:
- only the lowest nodes (the leaves) store information (the location of the rows in the associated table)
- the other nodes are just here to route to the right node during the search.

As you can see, there are more nodes (twice more). Indeed, you have additional nodes, the “decision nodes” that will help you to find the right node (that stores the location of the rows in the associated table). But the search complexity is still in O(log(N)) (there is just one more level). The big difference is that the lowest nodes are linked to their successors.
With this B+Tree, if you’re looking for values between 40 and 100:
- You just have to look for 40 (or the closest value after 40 if 40 doesn’t exist) like you did with the previous tree.
- Then gather the successors of 40 using the direct links to the successors until you reach 100.
Let’s say you found M successors and the tree has N nodes. The search for a specific node costs log(N) like the previous tree. But, once you have this node, you get the M successors in M operations with the links to their successors. This search only costs M + log(N) operations vs N operations with the previous tree. Moreover, you don’t need to read the full tree (just M + log(N) nodes), which means less disk usage. If M is low (like 200 rows) and N large (1 000 000 rows) it makes a BIG difference.
But there are new problems (again!). If you add or remove a row in a database (and therefore in the associated B+Tree index):
- you have to keep the order between nodes inside the B+Tree otherwise you won’t be able to find nodes inside the mess.
- you have to keep the lowest possible number of levels in the B+Tree otherwise the time complexity in O(log(N)) will become O(N).
I other words, the B+Tree needs to be self-ordered and self-balanced. Thankfully, this is possible with smart deletion and insertion operations. But this comes with a cost: the insertion and deletion in a B+Tree are in O(log(N)). This is why some of you have heard that using too many indexes is not a good idea. Indeed, you’re slowing down the fast insertion/update/deletion of a rowin a table since the database needs to update the indexes of the table with a costly O(log(N)) operation per index. Moreover, adding indexes means more workload for the transaction manager (we will see this manager at the end of the article).
For more details, you can look at the Wikipedia article about B+Tree. If you want an example of a B+Tree implementation in a database, look at this article and this article from a core developer of MySQL. They both focus on how innoDB (the engine of MySQL) handles indexes.
Note: I was told by a reader that, because of low-level optimizations, the B+Tree needs to be fully balanced.
Hash table
Our last important data structure is the hash table. It’s very useful when you want to quickly look for values. Moreover, understanding the hash table will help us later to understand a common database join operation called the hash join. This data structure is also used by a database to store some internal stuff (like the lock table or the buffer pool, we’ll see both concepts later)
The hash table is a data structure that quickly finds an element with its key. To build a hash table you need to define:
- a key for your elements
- a hash function for the keys. The computed hashes of the keys give the locations of the elements (called buckets).
- a function to compare the keys. Once you found the right bucket you have to find the element you’re looking for inside the bucket using this comparison.
A simple example
Let’s have a visual example:

This hash table has 10 buckets. Since I’m lazy I only drew 5 buckets but I know you’re smart so I let you imagine the 5 others. The Hash function I used is the modulo 10 of the key. In other words I only keep the last digit of the key of an element to find its bucket:
- if the last digit is 0 the element ends up in the bucket 0,
- if the last digit is 1 the element ends up in the bucket 1,
- if the last digit is 2 the element ends up in the bucket 2,
- …
The compare function I used is simply the equality between 2 integers.
Let’s say you want to get the element 78:
- The hash table computes the hash code for 78 which is 8.
- It looks in the bucket 8, and the first element it finds is 78.
- It gives you back the element 78
- The search only costs 2 operations (1 for computing the hash value and the other for finding the element inside the bucket).
Now, let’s say you want to get the element 59:
- The hash table computes the hash code for 59 which is 9.
- It looks in the bucket 9, and the first element it finds is 99. Since 99!=59, element 99 is not the right element.
- Using the same logic, it looks at the second element (9), the third (79), … , and the last (29).
- The element doesn’t exist.
- The search costs 7 operations.
A good hash function
As you can see, depending on the value you’re looking for, the cost is not the same!
If I now change the hash function with the modulo 1 000 000 of the key (i.e. taking the last 6 digits), the second search only costs 1 operation because there are no elements in the bucket 000059. The real challenge is to find a good hash function that will create buckets that contain a very small amount of elements.
In my example, finding a good hash function is easy. But this is a simple example, finding a good hash function is more difficult when the key is:
- a string (for example the last name of a person)
- 2 strings (for example the last name and the first name of a person)
- 2 strings and a date (for example the last name, the first name and the birth date of a person)
- …
With a good hash function, the search in a hash table is in O(1).
Array vs hash table
Why not using an array?
Hum, you’re asking a good question.
- A hash table can be half loaded in memory and the other buckets can stay on disk.
- With an array you have to use a contiguous space in memory. If you’re loading a large table it’s very difficult to have enough contiguous space.
- With a hash table you can choose the key you want (for example the country AND the last name of a person).
For more information, you can read my article on the Java HashMap which is an efficient hash table implementation; you don’t need to understand Java to understand the concepts inside this article.
Global overview
We’ve just seen the basic components inside a database. We now need to step back to see the big picture.
A database is a collection of information that can easily be accessed and modified. But a simple bunch of files could do the same. In fact, the simplest databases like SQLite are nothing more than a bunch of files. But SQLite is a well-crafted bunch of files because it allows you to:
- use transactions that ensure data are safe and coherent
- quickly process data even when you’re dealing with millions of data
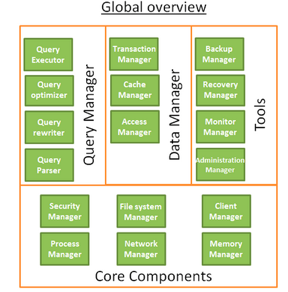
More generally, a database can be seen as the following figure:

Before writing this part, I’ve read multiple books/papers and every source had its on way to represent a database. So, don’t focus too much on how I organized this database or how I named the processes because I made some choices to fit the plan of this article. What matters are the different components; the overall idea is that a database is divided into multiple components that interact with each other.
The core components:
- The process manager: Many databases have a pool of processes/threads that needs to be managed. Moreover, in order to gain nanoseconds, some modern databases use their own threads instead of the Operating System threads.
- The network manager: Network I/O is a big issue, especially for distributed databases. That’s why some databases have their own manager.
- File system manager: Disk I/O is the first bottleneck of a database. Having a manager that will perfectly handle the Operating System file system or even replace it is important.
- The memory manager: To avoid the disk I/O penalty a large quantity of ram is required. But if you handle a large amount of memory, you need an efficient memory manager. Especially when you have many queries using memory at the same time.
- Security Manager: for managing the authentication and the authorizations of the users
- Client manager: for managing the client connections
- …
The tools:
- Backup manager: for saving and restoring a database.
- Recovery manager: for restarting the database in a coherent state after a crash
- Monitor manager: for logging the activity of the database and providing tools to monitor a database
- Administration manager: for storing metadata (like the names and the structures of the tables) and providing tools to manage databases, schemas, tablespaces, …
- …
The query Manager:
- Query parser: to check if a query is valid
- Query rewriter: to pre-optimize a query
- Query optimizer: to optimize a query
- Query executor: to compile and execute a query
The data manager:
- Transaction manager: to handle transactions
- Cache manager: to put data in memory before using them and put data in memory before writing them on disk
- Data access manager: to access data on disk
For the rest of this article, I’ll focus on how a database manages an SQL query through the following processes:
- the client manager
- the query manager
- the data manager (I’ll also include the recovery manager in this part)
Client manager

The client manager is the part that handles the communications with the client. The client can be a (web) server or an end-user/end-application. The client manager provides different ways to access the database through a set of well-known APIs: JDBC, ODBC, OLE-DB …
It can also provide proprietary database access APIs.
When you connect to a database:
- The manager first checks your authentication (your login and password) and then checks if you have the authorizations to use the database. These access rights are set by your DBA.
- Then, it checks if there is a process (or a thread) available to manage your query.
- It also checks if the database if not under heavy load.
- It can wait a moment to get the required resources. If this wait reaches a timeout, it closes the connection and gives a readable error message.
- Then it sends your query to the query manager and your query is processed
- Since the query processing is not an “all or nothing” thing, as soon as it gets data from the query manager, it stores the partial results in a buffer and start sending them to you.
- In case of problem, it stops the connection, gives you a readable explanation and releases the resources.
Query manager

This part is where the power of a database lies. During this part, an ill-written query is transformed into a fast executable code. The code is then executed and the results are returned to the client manager. It’s a multiple-step operation:
- the query is first parsed to see if it’s valid
- it’s then rewritten to remove useless operations and add some pre-optimizations
- it’s then optimized to improve the performances and transformed into an execution and data access plan.
- then the plan is compiled
- at last, it’s executed
In this part, I won’t talk a lot about the last 2 points because they’re less important.
After reading this part, if you want a better understanding I recommend reading:
- The initial research paper (1979) on cost based optimization: Access Path Selection in a Relational Database Management System. This article is only 12 pages and understandable with an average level in computer science.
- A very good and in-depth presentation on how DB2 9.X optimizes queries here
- A very good presentation on how PostgreSQL optimizes queries here. It’s the most accessible document since it’s more a presentation on “let’s see what query plans PostgreSQL gives in these situations“ than a “let’s see the algorithms used by PostgreSQL”.
- The official SQLite documentation about optimization. It’s “easy” to read because SQLite uses simple rules. Moreover, it’s the only official documentation that really explains how it works.
- A good presentation on how SQL Server 2005 optimizes queries here
- A white paper about optimization in Oracle 12c here
- 2 theoretical courses on query optimization from the authors of the book “DATABASE SYSTEM CONCEPTS” here and there. A good read that focuses on disk I/O cost but a good level in CS is required.
- Another theoretical course that I find more accessible but that only focuses on join operators and disk I/O.
Query parser
Each SQL statement is sent to the parser where it is checked for correct syntax. If you made a mistake in your query the parser will reject the query. For example, if you wrote “SLECT …” instead of “SELECT …”, the story ends here.
But this goes deeper. It also checks that the keywords are used in the right order. For example a WHERE before a SELECT will be rejected.
Then, the tables and the fields inside the query are analyzed. The parser uses the metadata of the database to check:
- If the tables exist
- If the fields of the tables exist
- If the operations for the types of the fields are possible (for example you can’t compare an integer with a string, you can’t use a substring() function on an integer)
Then it checks if you have the authorizations to read (or write) the tables in the query. Again, these access rights on tables are set by your DBA.
During this parsing, the SQL query is transformed into an internal representation (often a tree)
If everything is ok then the internal representation is sent to the query rewriter.
Query rewriter
At this step, we have an internal representation of a query. The aim of the rewriter is:
- to pre-optimize the query
- to avoid unnecessary operations
- to help the optimizer to find the best possible solution
The rewriter executes a list of known rules on the query. If the query fits a pattern of a rule, the rule is applied and the query is rewritten. Here is a non-exhaustive list of (optional) rules:
- View merging: If you’re using a view in your query, the view is transformed with the SQL code of the view.
- Subquery flattening: Having subqueries is very difficult to optimize so the rewriter will try to modify a query with a subquery to remove the subquery.
For example
SELECT
PERSON.*
FROM
PERSON
WHERE
PERSON.person_key
IN
(
SELECT
MAILS.person_key
FROM
MAILS
WHERE
MAILS.mail
LIKE
'christophe%'
);
|
Will be replaced by
SELECT
PERSON.*
FROM
PERSON, MAILS
WHERE
PERSON.person_key = MAILS.person_key
and
MAILS.mail
LIKE
'christophe%'
;
|
- Removal of unnecessary operators: For example if you use a DISTINCT whereas you have a UNIQUE constraint that prevents the data from being non-unique, the DISTINCT keyword is removed.
- Redundant join elimination: If you have twice the same join condition because one join condition is hidden in a view or if by transitivity there is a useless join, it’s removed.
- Constant arithmetic evaluation: If you write something that requires a calculus, then it’s computed once during the rewriting. For example WHERE AGE > 10+2 is transformed into WHERE AGE > 12 and TODATE(“some date”) is transformed into the date in the datetime format
- (Advanced) Partition Pruning: If you’re using a partitioned table, the rewriter is able to find what partitions to use.
- (Advanced) Materialized view rewrite: If you have a materialized view that matches a subset of the predicates in your query, the rewriter checks if the view is up to date and modifies the query to use the materialized view instead of the raw tables.
- (Advanced) Custom rules: If you have custom rules to modify a query (like Oracle policies), then the rewriter executes these rules
- (Advanced) Olap transformations: analytical/windowing functions, star joins, rollup … are also transformed (but I’m not sure if it’s done by the rewriter or the optimizer, since both processes are very close it must depends on the database).
This rewritten query is then sent to the query optimizer where the fun begins!
Statistics
Before we see how a database optimizes a query we need to speak about statistics becausewithout them a database is stupid. If you don’t tell the database to analyze its own data, it will not do it and it will make (very) bad assumptions.
But what kind of information does a database need?
I have to (briefly) talk about how databases and Operating systems store data. They’re using a minimum unit called a page or a block (4 or 8 kilobytes by default). This means that if you only need 1 Kbytes it will cost you one page anyway. If the page takes 8 Kbytes then you’ll waste 7 Kbytes.
Back to the statistics! When you ask a database to gather statistics, it computes values like:
- The number of rows/pages in a table
- For each column in a table:
- distinct data values
- the length of data values (min, max, average)
- data range information (min, max, average)
- Information on the indexes of the table.
These statistics will help the optimizer to estimate the disk I/O, CPU and memory usages of the query.
The statistics for each column are very important. For example if a table PERSON needs to be joined on 2 columns: LAST_NAME, FIRST_NAME. With the statistics, the database knows that there are only 1 000 different values on FIRST_NAME and 1 000 000 different values on LAST_NAME. Therefore, the database will join the data on LAST_NAME, FIRST_NAME instead of FIRST_NAME,LAST_NAME because it produces way less comparisons since the LAST_NAME are unlikely to be the same so most of the time a comparison on the 2 (or 3) first characters of the LAST_NAME is enough.
But these are basic statistics. You can ask a database to compute advanced statistics calledhistograms. Histograms are statistics that inform about the distribution of the values inside the columns. For example
- the most frequent values
- the quantiles
- …
These extra statistics will help the database to find an even better query plan. Especially for equality predicate (ex: WHERE AGE = 18 ) or range predicates (ex: WHERE AGE > 10 and AGE <40 ) because the database will have a better idea of the number rows concerned by these predicates (note: the technical word for this concept is selectivity).
The statistics are stored in the metadata of the database. For example you can see the statistics for the (non-partitioned) tables:
- in USER/ALL/DBA_TABLES and USER/ALL/DBA_TAB_COLUMNS for Oracle
- in SYSCAT.TABLES and SYSCAT.COLUMNS for DB2.
The statistics have to be up to date. There is nothing worse than a database thinking a table has only 500 rows whereas it has 1 000 000 rows. The only drawback of the statistics is that it takes time to compute them. This is why they’re not automatically computed by default in most databases. It becomes difficult with millions of data to compute them. In this case, you can choose to compute only the basics statistics or to compute the stats on a sample of the database.
For example, when I was working on a project dealing with hundreds of millions rows in each tables, I chose to compute the statistics on only 10%, which led to a huge gain in time. For the story it turned out to be a bad decision because occasionally the 10% chosen by Oracle 10G for a specific column of a specific table were very different from the overall 100% (which is very unlikely to happen for a table with 100M rows). This wrong statistic led to a query taking occasionally 8 hours instead of 30 seconds; a nightmare to find the root cause. This example shows how important the statistics are.
Note: Of course, there are more advanced statistics specific for each database. If you want to know more, read the documentations of the databases. That being said, I’ve tried to understand how the statistics are used and the best official documentation I found was the one from PostgreSQL.
Query optimizer

All modern databases are using a Cost Based Optimization (or CBO) to optimize queries. The idea is to put a cost an every operation and find the best way to reduce the cost of the query by using the cheapest chain of operations to get the result.
To understand how a cost optimizer works I think it’s good to have an example to “feel” the complexity behind this task. In this part I’ll present you the 3 common ways to join 2 tables and we will quickly see that even a simple join query is a nightmare to optimize. After that, we’ll see how real optimizers do this job.
For these joins, I’ll focus on their time complexity but a database optimizer computes their CPU cost, disk I/O cost and memory requirement. The difference between time complexity and CPU cost is that time cost is very approximate (it’s for lazy guys like me). For the CPU cost, I should count every operation like an addition, an “if statement”, a multiplication, an iteration … Moreover:
- Each high level code operation has a specific number of low level CPU operations.
- The cost of a CPU operation is not the same (in terms of CPU cycles) whether you’re using an Intel Core i7, an Intel Pentium 4, an AMD Opteron…. In other words it depends on the CPU architecture.
Using the time complexity is easier (at least for me) and with it we can still get the concept of CBO. I’ll sometimes speak about disk I/O since it’s an important concept. Keep in mind that the bottleneck is most of the time the disk I/O and not the CPU usage.
Indexes
We talked about indexes when we saw the B+Trees. Just remember that these indexes are already sorted.
FYI, there are other types of indexes like bitmap indexes. They don’t offer the same cost in terms of CPU, disk I/O and memory than B+Tree indexes.
Moreover, many modern databases can dynamically create temporary indexes just for the current query if it can improve the cost of the execution plan.
Access Path
Before applying your join operators, you first need to get your data. Here is how you can get your data.
Note: Since the real problem with all the access paths is the disk I/O, I won’t talk a lot about time complexity.
Full scan
If you’ve ever read an execution plan you must have seen the word full scan (or just scan). A full scan is simply the database reading a table or an index entirely. In terms of disk I/O, a table full scan is obviously more expensive than an index full scan.
Range Scan
There are other types of scan like index range scan. It is used for example when you use a predicate like “WHERE AGE > 20 AND AGE <40”.
Of course you need have an index on the field AGE to use this index range scan.
We already saw in the first part that the time cost of a range query is something like log(N) +M, where N is the number of data in this index and M an estimation of the number of rows inside this range. Both N and M values are known thanks to the statistics (Note: M is the selectivity for the predicate AGE >20 AND AGE<40). Moreover, for a range scan you don’t need to read the full index so it’s less expensive in terms of disk I/O than a full scan.
Unique scan
If you only need one value from an index you can use the unique scan.
Access by row id
Most of the time, if the database uses an index, it will have to look for the rows associated to the index. To do so it will use an access by row id.
For example, if you do something like
SELECT
LASTNAME, FIRSTNAME
from
PERSON
WHERE
AGE = 28
|
If you have an index for person on column age, the optimizer will use the index to find all the persons who are 28 then it will ask for the associate rows in the table because the index only has information about the age and you want to know the lastname and the firstname.
But, if now you do something like
SELECT
TYPE_PERSON.CATEGORY
from
PERSON ,TYPE_PERSON
WHERE
PERSON.AGE = TYPE_PERSON.AGE
|
The index on PERSON will be used to join with TYPE_PERSON but the table PERSON will not be accessed by row id since you’re not asking information on this table.
Though it works great for a few accesses, the real issue with this operation is the disk I/O. If you need too many accesses by row id the database might choose a full scan.
Others paths
I didn’t present all the access paths. If you want to know more, you can read the Oracle documentation. The names might not be the same for the other databases but the concepts behind are the same.
Join operators
So, we know how to get our data, let’s join them!
I’ll present the 3 common join operators: Merge Join, Hash Join and Nested Loop Join. But before that, I need to introduce new vocabulary: inner relation and outer relation. A relation can be:
- a table
- an index
- an intermediate result from a previous operation (for example the result of a previous join)
When you’re joining two relations, the join algorithms manage the two relations differently. In the rest of the article, I’ll assume that:
- the outer relation is the left data set
- the inner relation is the right data set
For example, A JOIN B is the join between A and B where A is the outer relation and B the inner relation.
Most of the time, the cost of A JOIN B is not the same as the cost of B JOIN A.
In this part, I’ll also assume that the outer relation has N elements and the inner relation M elements. Keep in mind that a real optimizer knows the values of N and M with the statistics.
Note: N and M are the cardinalities of the relations.
Nested loop join
The nested loop join is the easiest one.

Here is the idea:
- for each row in the outer relation
- you look at all the rows in the inner relation to see if there are rows that match
Here is a pseudo code:
nested_loop_join(array outer, array inner)
for
each row a in outer
for
each row b in inner
if
(match_join_condition(a,b))
write_result_in_output(a,b)
end
if
end
for
end
for
|
Since it’s a double iteration, the time complexity is O(N*M)
In term of disk I/O, for each of the N rows in the outer relation, the inner loop needs to read M rows from the inner relation. This algorithm needs to read N + N*M rows from disk. But, if the inner relation is small enough, you can put the relation in memory and just have M +N reads. With this modification, the inner relation must be the smallest one since it has more chance to fit in memory.
In terms of time complexity it makes no difference but in terms of disk I/O it’s way better to read only once both relations.
Of course, the inner relation can be replaced by an index, it will be better for the disk I/O.
Since this algorithm is very simple, here is another version that is more disk I/O friendly if the inner relation is too big to fit in memory. Here is the idea:
- instead of reading both relation row by row,
- you read them bunch by bunch and keep 2 bunches of rows (from each relation) in memory,
- you compare the rows inside the two bunches and keep the rows that match,
- then you load new bunches from disk and compare them
- and so on until there are no bunches to load.
Here is a possible algorithm:
// improved version to reduce the disk I/O.
nested_loop_join_v2(file outer, file inner)
for
each bunch ba in outer
// ba is now in memory
for
each bunch bb in inner
// bb is now in memory
for
each row a in ba
for
each row b in bb
if
(match_join_condition(a,b))
write_result_in_output(a,b)
end
if
end
for
end
for
end
for
end
for
|
With this version, the time complexity remains the same, but the number of disk access decreases:
- With the previous version, the algorithm needs N + N*M accesses (each access gets one row).
- With this new version, the number of disk accesses becomes number_of_bunches_for(outer)+ number_of_ bunches_for(outer)* number_of_ bunches_for(inner).
- If you increase the size of the bunch you reduce the number of disk accesses.
Note: Each disk access gathers more data than the previous algorithm but it doesn’t matter since they’re sequential accesses (the real issue with mechanical disks is the time to get the first data).
Hash join
The hash join is more complicated but gives a better cost than a nested loop join in many situations.

The idea of the hash join is to:
- 1) Get all elements from the inner relation
- 2) Build an in-memory hash table
- 3) Get all elements of the outer relation one by one
- 4) Compute the hash of each element (with the hash function of the hash table) to find the associated bucket of the inner relation
- 5) find if there is a match between the elements in the bucket and the element of the outer table
In terms of time complexity I need to make some assumptions to simplify the problem:
- The inner relation is divided into X buckets
- The hash function distributes hash values almost uniformly for both relations. In other words the buckets are equally sized.
- The matching between an element of the outer relation and all elements inside a bucket costs the number of elements inside the buckets.
The time complexity is (M/X) * N + cost_to_create_hash_table(M) + cost_of_hash_function*N
If the Hash function creates enough small-sized buckets then the time complexity is O(M+N)
Here is another version of the hash join which is more memory friendly but less disk I/O friendly. This time:
- 1) you compute the hash tables for both the inner and outer relations
- 2) then you put them on disk
- 3) then you compare the 2 relations bucket by bucket (with one loaded in-memory and the other read row by row)
Merge join
The merge join is the only join that produces a sorted result.
Note: In this simplified merge join, there are no inner or outer tables; they both play the same role. But real implementations make a difference, for example, when dealing with duplicates.
The merge join can be divided into of two steps:
- (Optional) Sort join operations: Both the inputs are sorted on the join key(s).
- Merge join operation: The sorted inputs are merged together.
Sort
We already spoke about the merge sort, in this case a merge sort in a good algorithm (but not the best if memory is not an issue).
But sometimes the data sets are already sorted, for example:
- If the table is natively ordered, for example an index-organized table on the join condition
- If the relation is an index on the join condition
- If this join is applied on an intermediate result already sorted during the process of the query
Merge join

This part is very similar to the merge operation of the merge sort we saw. But this time, instead of picking every element from both relations, we only pick the elements from both relations that are equals. Here is the idea:
- 1) you compare both current elements in the 2 relations (current=first for the first time)
- 2) if they’re equal, then you put both elements in the result and you go to the next element for both relations
- 3) if not, you go to the next element for the relation with the lowest element (because the next element might match)
- 4) and repeat 1,2,3 until you reach the last element of one of the relation.
This works because both relations are sorted and therefore you don’t need to “go back” in these relations.
This algorithm is a simplified version because it doesn’t handle the case where the same data appears multiple times in both arrays (in other words a multiple matches). The real version is more complicated “just” for this case; this is why I chose a simplified version.
If both relations are already sorted then the time complexity is O(N+M)
If both relations need to be sorted then the time complexity is the cost to sort both relations:O(N*Log(N) + M*Log(M))
For the CS geeks, here is a possible algorithm that handles the multiple matches (note: I’m not 100% sure about my algorithm):
mergeJoin(relation a, relation b)
relation output
integer a_key:=
0
;
integer b_key:=
0
;
while
(a[a_key]!=
null
or b[b_key]!=
null
)
if
(a[a_key] < b[b_key])
a_key++;
else
if
(a[a_key] > b[b_key])
b_key++;
else
//Join predicate satisfied
//i.e. a[a_key] == b[b_key]
//count the number of duplicates in relation a
integer nb_dup_in_a =
1
:
while
(a[a_key]==a[a_key+nb_dup_in_a])
nb_dup_in_a++;
//count the number of duplicates in relation b
integer dup_in_b =
1
:
while
(b[b_key]==b[b_key+nb_dup_in_b])
nb_dup_in_b++;
//write the duplicates in output
for
(
int
i =
0
; i< nb_dup_in_a ; i++)
for
(
int
j =
0
; i< nb_dup_in_b ; i++)
write_result_in_output(a[a_key+i],b[b_key+j])
a_key=a_key + nb_dup_in_a-
1
;
b_key=b_key + nb_dup_in_b-
1
;
end
if
end
while
|
Which one is the best?
If there was a best type of joins, there wouldn’t be multiple types. This question is very difficult because many factors come into play like:
- The amount of free memory: without enough memory you can say goodbye to the powerful hash join (at least the full in-memory hash join)
- The size of the 2 data sets. For example if you have a big table with a very small one, a nested loop join will be faster than a hash join because the hash join has an expensive creation of hashes. If you have 2 very large tables the nested loop join will be very CPU expensive.
- The presence of indexes. With 2 B+Tree indexes the smart choice seems to be the merge join
- If the result need to be sorted: Even if you’re working with unsorted data sets, you might want to use a costly merge join (with the sorts) because at the end the result will be sorted and you’ll be able to chain the result with another merge join (or maybe because the query asks implicitly/explicitly for a sorted result with an ORDER BY/GROUP BY/DISTINCT operation)
- If the relations are already sorted: In this case the merge join is the best candidate
- The type of joins you’re doing: is it an equijoin (i.e.: tableA.col1 = tableB.col2)? Is it an inner join, an outer join, a cartesian product or a self-join? Some joins can’t work in certain situations.
- The distribution of data. If the data on the join condition are skewed (For example you’re joining people on their last name but many people have the same), using a hash join will be a disaster because the hash function will create ill-distributed buckets.
- If you want the join to be executed by multiple threads/process
For more information, you can read the DB2, ORACLE or SQL Server documentations.
Simplified example
We’ve just seen 3 types of join operations.
Now let’s say we need to join 5 tables to have a full view of a person. A PERSON can have:
- multiple MOBILES
- multiple MAILS
- multiple ADRESSES
- multiple BANK_ACCOUNTS
In other words we need a quick answer for the following query:
SELECT
*
from
PERSON, MOBILES, MAILS,ADRESSES, BANK_ACCOUNTS
WHERE
PERSON.PERSON_ID = MOBILES.PERSON_ID
AND
PERSON.PERSON_ID = MAILS.PERSON_ID
AND
PERSON.PERSON_ID = ADRESSES.PERSON_ID
AND
PERSON.PERSON_ID = BANK_ACCOUNTS.PERSON_ID
|
As a query optimizer, I have to find the best way to process the data. But there are 2 problems:
- What kind of join should I use for each join?
I have 3 possible joins (Hash Join, Merge Join, Nested Join) with the possibility to use 0,1 or 2 indexes (not to mention that there are different types of indexes).
- What order should I choose to compute the join?
For example, the following figure shows different possible plans for only 3 joins on 4 tables

So here are my possibilities:
- 1) I use a brute force approach
Using the database statistics, I compute the cost for every possible plan and I keep the best one. But there are many possibilities. For a given order of joins, each join has 3 possibilities: HashJoin, MergeJoin, NestedJoin. So, for a given order of joins there are 34possibilities. The join ordering is a permutation problem on a binary tree and there are (2*4)!/(4+1)! possible orders. For this very simplified problem, I end up with 34*(2*4)!/(4+1)! possibilities.
In non-geek terms, it means 27 216 possible plans. If I now add the possibility for the merge join to take 0,1 or 2 B+Tree indexes, the number of possible plans becomes 210 000. Did I forget to mention that this query is VERY SIMPLE?
- 2) I cry and quit this job
It’s very tempting but you wouldn’t get your result and I need money to pay the bills.
- 3) I only try a few plans and take the one with the lowest cost.
Since I’m not superman, I can’t compute the cost of every plan. Instead, I can arbitrary choose a subset of all the possible plans, compute their costs and give you the best plan of this subset.
- 4) I apply smart rules to reduce the number of possible plans.
There are 2 types of rules:
I can use “logical” rules that will remove useless possibilities but they won’t filter a lot of possible plans. For example: “the inner relation of the nested loop join must be the smallest data set”
I accept not finding the best solution and apply more aggressive rules to reduce a lot the number of possibilities. For example “If a relation is small, use a nested loop join and never use a merge join or a hash join”
In this simple example, I end up with many possibilities. But a real query can have other relational operators like OUTER JOIN, CROSS JOIN, GROUP BY, ORDER BY, PROJECTION, UNION, INTERSECT, DISTINCT … which means even more possibilities.
So, how a database does it?
Dynamic programming, greedy algorithm and heuristic
A relational database tries the multiple approaches I’ve just said. The real job of an optimizer is to find a good solution on a limited amount of time.
Most of the time an optimizer doesn’t find the best solution but a “good” one.
For small queries, doing a brute force approach is possible. But there is a way to avoid unnecessary computations so that even medium queries can use the brute force approach. This is called dynamic programming.
Dynamic Programming
The idea behind these 2 words is that many executions plan are very similar. If you look at the following plans:

They share the same (A JOIN B) subtree. So, instead of computing the cost of this subtree in every plan, we can compute it once, save the computed cost and reuse it when we see this subtree again. More formally, we’re facing an overlapping problem. To avoid the extra-computation of the partial results we’re using memoization.
Using this technique, instead of having a (2*N)!/(N+1)! time complexity, we “just” have 3N. In our previous example with 4 joins, it means passing from 336 ordering to 81. If you take a biggerquery with 8 joins (which is not big), it means passing from 57 657 600 to 6561.
For the CS geeks, here is an algorithm I found on the formal course I already gave you. I won’t explain this algorithm so read it only if you already know dynamic programming or if you’re good with algorithms (you’ve been warned!):
procedure findbestplan(S)
if
(bestplan[S].cost infinite)
return
bestplan[S]
// else bestplan[S] has not been computed earlier, compute it now
if
(S contains only
1
relation)
set bestplan[S].plan and bestplan[S].cost based on the best way
of accessing S
/* Using selections on S and indices on S */
else
for
each non-empty subset S1 of S such that S1 != S
P1= findbestplan(S1)
P2= findbestplan(S - S1)
A = best algorithm
for
joining results of P1 and P2
cost = P1.cost + P2.cost + cost of A
if
cost < bestplan[S].cost
bestplan[S].cost = cost
bestplan[S].plan = “execute P1.plan; execute P2.plan;
join results of P1 and P2 using A”
return
bestplan[S]
|
For bigger queries you can still do a dynamic programming approach but with extra rules (orheuristics) to remove possibilities:
- If we analyze only a certain type of plan (for example: the left-deep trees) we end up with n*2n instead of 3n

- If we add logical rules to avoid plans for some patterns (like “if a table as an index for the given predicate, don’t try a merge join on the table but only on the index”) it will reduce the number of possibilities without hurting to much the best possible solution.
- If we add rules on the flow (like “perform the join operations BEFORE all the other relational operations”) it also reduces a lot of possibilities.
- …
Greedy algorithms
But for a very big query or to have a very fast answer (but not a very fast query), another type of algorithms is used, the greedy algorithms.
The idea is to follow a rule (or heuristic) to build a query plan in an incremental way. With this rule, a greedy algorithm finds the best solution to a problem one step at a time. The algorithm starts the query plan with one JOIN. Then, at each step, the algorithm adds a new JOIN to the query plan using the same rule.
Let’s take a simple example. Let’s say we have a query with 4 joins on 5 tables (A, B, C, D and E). To simplify the problem we just take the nested join as a possible join. Let’s use the rule “use the join with the lowest cost”
- we arbitrary start on one of the 5 tables (let’s choose A)
- we compute the cost of every join with A (A being the inner or outer relation).
- we find that A JOIN B gives the lowest cost.
- we then compute the cost of every join with the result of A JOIN B (A JOIN B being the inner or outer relation).
- we find that (A JOIN B) JOIN C gives the best cost.
- we then compute the cost of every join with the result of the (A JOIN B) JOIN C …
- ….
- At the end we find the plan (((A JOIN B) JOIN C) JOIN D) JOIN E)
Since we arbitrary started with A, we can apply the same algorithm for B, then C then D then E. We then keep the plan with the lowest cost.
By the way, this algorithm has a name: it’s called the Nearest neighbor algorithm.
I won’t go into details, but with a good modeling and a sort in N*log(N) this problem can easily be solved. The cost of this algorithm is in O(N*log(N)) vs O(3N) for the full dynamic programming version. If you have a big query with 20 joins, it means 26 vs 3 486 784 401, a BIG difference!
The problem with this algorithm is that we assume that finding the best join between 2 tables will give us the best cost if we keep this join and add a new join. But:
- even if A JOIN B gives the best cost between A, B and C
- (A JOIN C) JOIN B might give a better result than (A JOIN B) JOIN C.
To improve the result, you can run multiple greedy algorithms using different rules and keep the best plan.
Other algorithms
[If you’re already fed up with algorithms, skip to the next part, what I’m going to say is not important for the rest of the article]
The problem of finding the best possible plan is an active research topic for many CS researchers. They often try to find better solutions for more precise problems/patterns. For example,
- if the query is a star join (it’s a certain type of multiple-join query), some databases will use a specific algorithm.
- if the query is a parallel query, some databases will use a specific algorithm
- …
Other algorithms are also studied to replace dynamic programming for large queries. Greedy algorithms belong to larger family called heuristic algorithms. A greedy algorithm follows a rule (or heuristic), keeps the solution it found at the previous step and “appends” it to find the solution for the current step. Some algorithms follow a rule and apply it in a step-by-step way but don’t always keep the best solution found in the previous step. They are called heuristic algorithms.
For example, genetic algorithms follow a rule but the best solution of the last step is not often kept:
- A solution represents a possible full query plan
- Instead of one solution (i.e. plan) there are P solutions (i.e. plans) kept at each step.
- 0) P query plans are randomly created
- 1) Only the plans with the best costs are kept
- 2) These best plans are mixed up to produce P news plans
- 3) Some of the P new plans are randomly modified
- 4) The step 1,2,3 are repeated T times
- 5) Then you keep the best plan from the P plans of the last loop.
The more loops you do the better the plan will be.
Is it magic? No, it’s the laws of nature: only the fittest survives!
FYI, genetic algorithms are implemented in PostgreSQL but I wasn’t able to find if they’re used by default.
There are other heuristic algorithms used in databases like Simulated Annealing, Iterative Improvement, Two-Phase Optimization… But I don’t know if they’re currently used in enterprise databases or if they’re only used in research databases.
For more information, you can read the following research article that presents more possible algorithms: Review of Algorithms for the Join Ordering Problem in Database Query Optimization
Real optimizers
[You can skip to the next part, what I’m going to say is not important]
But, all this blabla is very theoretical. Since I’m a developer and not a researcher, I like concrete examples.
Let’s see how the SQLite optimizer works. It’s a light database so it uses a simple optimization based on a greedy algorithm with extra-rules to limit the number of possibilities:
- SQLite chooses to never reorder tables in a CROSS JOIN operator
- joins are implemented as nested joins
- outer joins are always evaluated in the order in which they occur
- …
- Prior to version 3.8.0, SQLite uses the “Nearest Neighbor” greedy algorithm when searching for the best query plan
Wait a minute … we’ve already seen this algorithm! What a coincidence!
- Since version 3.8.0 (released in 2015), SQLite uses the “N Nearest Neighbors” greedy algorithm when searching for the best query plan
Let’s see how another optimizer does his job. IBM DB2 is like all the enterprise databases but I’ll focus on this one since it’s the last one I’ve really used before switching to Big Data.
If we look at the official documentation, we learn that the DB2 optimizer let you use 7 different levels of optimization:
- Use greedy algorithms for the joins
- 0 – minimal optimization, use index scan and nested-loop join and avoid some Query Rewrite
- 1 – low optimization
- 2 – full optimization
- Use dynamic programming for the joins
- 3 – moderate optimization and rough approximation
- 5 – full optimization, uses all techniques with heuristics
- 7 – full optimization similar to 5, without heuristics
- 9 – maximal optimization spare no effort/expense considers all possible join orders, including Cartesian products
We can see that DB2 uses greedy algorithms and dynamic programming. Of course, they don’t share the heuristics they use since the query optimizer is the main power of a database.
FYI, the default level is 5. By default the optimizer uses the following characteristics:
- All available statistics, including frequent-value and quantile statistics, are used.
- All query rewrite rules (including materialized query table routing) are applied, except computationally intensive rules that are applicable only in very rare cases.
- Dynamic programming join enumeration is used, with:
- Limited use of composite inner relation
- Limited use of Cartesian products for star schemas involving lookup tables
- A wide range of access methods is considered, including list prefetch (note: will see what is means), index ANDing (note: a special operation with indexes), and materialized query table routing.
By default, DB2 uses dynamic programming limited by heuristics for the join ordering.
The others conditions (GROUP BY, DISTINCT…) are handled by simple rules.
Query Plan Cache
Since the creation of a plan takes time, most databases store the plan into a query plan cache to avoid useless re-computations of the same query plan. It’s kind of a big topic since the database needs to know when to update the outdated plans. The idea is to put a threshold and if the statistics of a table have changed above this threshold then the query plan involving this table is purged from the cache.
Query executor
At this stage we have an optimized execution plan. This plan is compiled to become an executable code. Then, if there are enough resources (memory, CPU) it is executed by the query executor. The operators in the plan (JOIN, SORT BY …) can be executed in a sequential or parallel way; it’s up to the executor. To get and write its data, the query executor interacts with the data manager, which is the next part of the article.
Data manager

At this step, the query manager is executing the query and needs the data from the tables and indexes. It asks the data manager to get the data, but there are 2 problems:
- Relational databases use a transactional model. So, you can’t get any data at any time because someone else might be using/modifying the data at the same time.
- Data retrieval is the slowest operation in a database, therefore the data manager needs to be smart enough to get and keep data in memory buffers.
In this part, we’ll see how relational databases handle these 2 problems. I won’t talk about the way the data manager gets its data because it’s not the most important (and this article is long enough!).
Cache manager
As I already said, the main bottleneck of databases is disk I/O. To improve performance, modern databases use a cache manager.

Instead of directly getting the data from the file system, the query executor asks for the data to the cache manager. The cache manager has an in-memory cache called buffer pool. Getting data from memory dramatically speeds up a database. It’s difficult to give an order of magnitude because it depends on the operation you need to do:
- sequential access (ex: full scan) vs random access (ex: access by row id),
- read vs write
and the type of disks used by the database:
- 7.2k/10k/15k rpm HDD
- SSD
- RAID 1/5/…
but I’d say memory is 100 to 100k times faster than disk.
But, this leads to another problem (as always with databases…). The cache manager needs to get the data in memory BEFORE the query executor uses them; otherwise the query manager has to wait for the data from the slow disks.
Prefetching
This problem is called prefetching. A query executor knows the data it’ll need because it knows the full flow of the query and has knowledge of the data on disk with the statistics. Here is the idea:
- When the query executor is processing its first bunch of data
- It asks the cache manager to pre-load the second bunch of data
- When it starts processing the second bunch of data
- It asks the CM to pre-load the third bunch and informs the CM that the first bunch can be purged from cache.
- …
The CM stores all these data in its buffer pool. In order to know if a data is still needed, the cache manager adds an extra-information about the cached data (called a latch).
Sometimes the query executor doesn’t know what data it’ll need and some databases don’t provide this functionality. Instead, they use a speculative prefetching (for example: if the query executor asked for data 1,3,5 it’ll likely ask for 7,9,11 in a near future) or a sequential prefetching (in this case the CM simply loads from disks the next contiguous data after the ones asked).
To monitor how well the prefetching is working, modern databases provide a metric calledbuffer/cache hit ratio. The hit ratio shows how often a requested data has been found in the buffer cache without requiring disk access.
Note: a poor cache hit ratio doesn’t always mean that the cache is ill-working. For more information, you can read the Oracle documentation.
But, a buffer is a limited amount of memory. Therefore, it needs to remove some data to be able to load new ones. Loading and purging the cache has a cost in terms of disk and network I/O. If you have a query that is often executed, it wouldn’t be efficient to always load then purge the data used by this query. To handle this problem, modern databases use a buffer replacement strategy.
Buffer-Replacement strategies
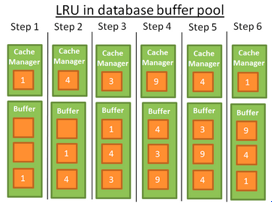
Most modern databases (at least SQL Server, MySQL, Oracle and DB2) use an LRU algorithm.
LRU
LRU stands for Least Recently Used. The idea behind this algorithm is to keep in the cache the data that have been recently used and, therefore, are more likely to be used again.
Here is a visual example:

For the sake of comprehension, I’ll assume that the data in the buffer are not locked by latches (and therefore can be removed). In this simple example the buffer can store 3 elements:
- 1: the cache manager uses the data 1 and puts the data into the empty buffer
- 2: the CM uses the data 4 and puts the data into the half-loaded buffer
- 3: the CM uses the data 3 and puts the data into the half-loaded buffer
- 4: the CM uses the data 9. The buffer is full so data 1 is removed since it’s the last recently used data. Data 9 is added into the buffer
- 5: the CM uses the data 4. Data 4 is already in the buffer therefore it becomes the first recently used data again.
- 6: the CM uses the data 1. The buffer is full so data 9 is removed since it’s the last recently used data. Data 1 is added into the buffer
- …
This algorithm works well but there are some limitations. What if there is a full scan on a large table? In other words, what happens when the size of the table/index is above the size of the buffer? Using this algorithm will remove all the previous values in the cache whereas the data from the full scan are likely to be used only once.
Improvements
To prevent this to happen, some databases add specific rules. For example according to Oracle documentation:
“For very large tables, the database typically uses a direct path read, which loads blocks directly […], to avoid populating the buffer cache. For medium size tables, the database may use a direct read or a cache read. If it decides to use a cache read, then the database places the blocks at the end of the LRU list to prevent the scan from effectively cleaning out the buffer cache.”
There are other possibilities like using an advanced version of LRU called LRU-K. For example SQL Server uses LRU-K for K =2.
This idea behind this algorithm is to take into account more history. With the simple LRU (which is also LRU-K for K=1), the algorithm only takes into account the last time the data was used. With the LRU-K:
- It takes into account the K last times the data was used.
- A weight is put on the number of times the data was used
- If a bunch of new data is loaded into the cache, the old but often used data are not removed (because their weights are higher).
- But the algorithm can’t keep old data in the cache if they aren’t used anymore.
- So the weights decrease over time if the data is not used.
The computation of the weight is costly and this is why SQL Server only uses K=2. This value performs well for an acceptable overhead.
For a more in-depth knowledge of LRU-K, you can read the original research paper (1993): The LRU-K page replacement algorithm for database disk buffering.
Other algorithms
Of course there are other algorithms to manage cache like
- 2Q (a LRU-K like algorithm)
- CLOCK (a LRU-K like algorithm)
- MRU (most recently used, uses the same logic than LRU but with another rule)
- LRFU (Least Recently and Frequently Used)
- …
Some databases let the possibility to use another algorithm than the default one.
Write buffer
I only talked about read buffers that load data before using them. But in a database you also have write buffers that store data and flush them on disk by bunches instead of writing data one by one and producing many single disk accesses.
Keep in mind that buffers store pages (the smallest unit of data) and not rows (which is a logical/human way to see data). A page in a buffer pool is dirty if the page has been modified and not written on disk. There are multiple algorithms to decide the best time to write the dirty pages on disk but it’s highly linked to the notion of transaction, which is the next part of the article.
Transaction manager
Last but not least, this part is about the transaction manager. We’ll see how this process ensures that each query is executed in its own transaction. But before that, we need to understand the concept of ACID transactions.
I’m on acid
An ACID transaction is a unit of work that ensures 4 things:
- Atomicity: the transaction is “all or nothing”, even if it lasts 10 hours. If the transaction crashes, the state goes back to before the transaction (the transaction is rolled back).
- Isolation: if 2 transactions A and B run at the same time, the result of transactions A and B must be the same whether A finishes before/after/during transaction B.
- Durability: once the transaction is committed (i.e. ends successfully), the data stay in the database no matter what happens (crash or error).
- Consistency: only valid data (in terms of relational constraints and functional constraints) are written to the database. The consistency is related to atomicity and isolation.

During the same transaction, you can run multiple SQL queries to read, create, update and delete data. The mess begins when two transactions are using the same data. The classic example is a money transfer from an account A to an account B. Imagine you have 2 transactions:
- Transaction 1 that takes 100$ from account A and gives them to account B
- Transaction 2 that takes 50$ from account A and gives them to account B
If we go back to the ACID properties:
- Atomicity ensures that no matter what happens during T1 (a server crash, a network failure …), you can’t end up in a situation where the 100$ are withdrawn from A and not given to B (this case is an inconsistent state).
- Isolation ensures that if T1 and T2 happen at the same time, in the end A will be taken 150$ and B given 150$ and not, for example, A taken 150$ and B given just $50 because T2 has partially erased the actions of T1 (this case is also an inconsistent state).
- Durability ensures that T1 won’t disappear into thin air if the database crashes just after T1 is committed.
- Consistency ensures that no money is created or destroyed in the system.
[You can skip to the next part if you want, what I’m going to say is not important for the rest of the article]
Many modern databases don’t use a pure isolation as a default behavior because it comes with a huge performance overhead. The SQL norm defines 4 levels of isolation:
- Serializable (default behaviour in SQLite): The highest level of isolation. Two transactions happening at the same time are 100% isolated. Each transaction has its own “world”.
- Repeatable read (default behavior in MySQL): Each transaction has its own “world” except in one situation. If a transaction ends up successfully and adds new data, these data will be visible in the other and still running transactions. But if A modifies a data and ends up successfully, the modification won’t be visible in the still running transactions. So, this break of isolation between transactions is only about new data, not the existing ones.
For example, if a transaction A does a “SELECT count(1) from TABLE_X” and then a new data is added and committed in TABLE_X by Transaction B, if transaction A does again a count(1) the value won’t be the same.
This is called a phantom read.
- Read committed (default behavior in Oracle, PostgreSQL and SQL Server): It’s a repeatable read + a new break of isolation. If a transaction A reads a data D and then this data is modified (or deleted) and committed by a transaction B, if A reads data D again it will see the modification (or deletion) made by B on the data.
This is called a non-repeatable read.
- Read uncommitted: the lowest level of isolation. It’s a read committed + a new break of isolation. If a transaction A reads a data D and then this data D is modified by a transaction B (that is not committed and still running), if A reads data D again it will see the modified value. If transaction B is rolled back, then data D read by A the second time doesn’t make no sense since it has been modified by a transaction B that never happened (since it was rolled back).
This is called a dirty read.
Most databases add their own custom levels of isolation (like the snapshot isolation used by PostgreSQL, Oracle and SQL Server). Moreover, most databases don’t implement all the levels of the SQL norm (especially the read uncommitted level).
The default level of isolation can be overridden by the user/developer at the beginning of the connection (it’s a very simple line of code to add).
Concurrency Control
The real issue to ensure isolation, coherency and atomicity is the write operations on the same data (add, update and delete):
- if all transactions are only reading data, they can work at the same time without modifying the behavior of another transaction.
- if (at least) one of the transactions is modifying a data read by other transactions, the database needs to find a way to hide this modification from the other transactions. Moreover, it also needs to ensure that this modification won’t be erased by another transaction that didn’t see the modified data.
This problem is a called concurrency control.
The easiest way to solve this problem is to run each transaction one by one (i.e. sequentially). But that’s not scalable at all and only one core is working on the multi-processor/core server, not very efficient…
The ideal way to solve this problem is, every time a transaction is created or cancelled:
- to monitor all the operations of all the transactions
- to check if the parts of 2 (or more) transactions are in conflict because they’re reading/modifying the same data.
- to reorder the operations inside the conflicting transactions to reduce the size of the conflicting parts
- to execute the conflicting parts in a certain order (while the non-conflicting transactions are still running concurrently).
- to take into account that a transaction can be cancelled.
More formally it’s a scheduling problem with conflicting schedules. More concretely, it’s a very difficult and CPU-expensive optimization problem. Enterprise databases can’t afford to wait hours to find the best schedule for each new transaction event. Therefore, they use less ideal approaches that lead to more time wasted between conflicting transactions.
Lock manager
To handle this problem, most databases are using locks and/or data versioning. Since it’s a big topic, I’ll focus on the locking part then I’ll speak a little bit about data versioning.
Pessimistic locking
The idea behind locking is:
- if a transaction needs a data,
- it locks the data
- if another transaction also needs this data,
- it’ll have to wait until the first transaction releases the data.
This is called an exclusive lock.
But using an exclusive lock for a transaction that only needs to read a data is very expensive sinceit forces other transactions that only want to read the same data to wait. This is why there is another type of lock, the shared lock.
With the shared lock:
- if a transaction needs only to read a data A,
- it “shared locks” the data and reads the data
- if a second transaction also needs only to read data A,
- it “shared locks” the data and reads the data
- if a third transaction needs to modify data A,
- it “exclusive locks” the data but it has to wait until the 2 other transactions release their shared locks to apply its exclusive lock on data A.
Still, if a data as an exclusive lock, a transaction that just needs to read the data will have to wait the end of the exclusive lock to put a shared lock on the data.

The lock manager is the process that gives and releases locks. Internally, it stores the locks in a hash table (where the key is the data to lock) and knows for each data:
- which transactions are locking the data
- which transactions are waiting for the data
Deadlock
But the use of locks can lead to a situation where 2 transactions are waiting forever for a data:

In this figure:
- transaction A has an exclusive lock on data1 and is waiting to get data2
- transaction B has an exclusive lock on data2 and is waiting to get data1
This is called a deadlock.
During a deadlock, the lock manager chooses which transaction to cancel (rollback) in order to remove the deadlock. This decision is not easy:
- Is it better to kill the transaction that modified the least amount of data (and therefore that will produce the least expensive rollback)?
- Is it better to kill the least aged transaction because the user of the other transaction has waited longer?
- Is it better to kill the transaction that will take less time to finish (and avoid a possible starvation)?
- In case of rollback, how many transactions will be impacted by this rollback?
But before making this choice, it needs to check if there are deadlocks.
The hash table can be seen as a graph (like in the previous figures). There is a deadlock if there is a cycle in the graph. Since it’s expensive to check for cycles (because the graph with all the locks is quite big), a simpler approach is often used: using a timeout. If a lock is not given within this timeout, the transaction enters a deadlock state.
The lock manager can also check before giving a lock if this lock will create a deadlock. But again it’s computationally expensive to do it perfectly. Therefore, these pre-checks are often a set of basic rules.
Two-phase locking
The simplest way to ensure a pure isolation is if a lock is acquired at the beginning of the transaction and released at the end of the transaction. This means that a transaction has to wait for all its locks before it starts and the locks held by a transaction are released when the transaction ends. It works but it produces a lot of time wasted to wait for all locks.
A faster way is the Two-Phase Locking Protocol (used by DB2 and SQL Server) where a transaction is divided into 2 phases:
- the growing phase where a transaction can obtain locks, but can’t release any lock.
- the shrinking phase where a transaction can release locks (on the data it has already processed and won’t process again), but can’t obtain new locks.

The idea behind these 2 simple rules is:
- to release the locks that aren’t used anymore to reduce the wait time of other transactions waiting for these locks
- to prevent from cases where a transaction gets data modified after the transaction started and therefore aren’t coherent with the first data the transaction acquired.
This protocol works well except if a transaction that modified a data and released the associated lock is cancelled (rolled back). You could end up in a case where another transaction reads the modified value whereas this value is going to be rolled back. To avoid this problem, all the exclusive locks must be released at the end of the transaction.
A few words
Of course a real database uses a more sophisticated system involving more types of locks (like intention locks) and more granularities (locks on a row, on a page, on a partition, on a table, on a tablespace) but the idea remains the same.
I only presented the pure lock-based approach. Data versioning is another way to deal with this problem.
The idea behind versioning is that:
- every transaction can modify the same data at the same time
- each transaction has its own copy (or version) of the data
- if 2 transactions modify the same data, only one modification will be accepted, the other will be refused and the associated transaction will be rolled back (and maybe re-run).
It increases the performance since:
- reader transactions don’t block writer transactions
- writer transactions don’t block reader transactions
- there is no overhead from the “fat and slow” lock manager
Everything is better than locks except when 2 transactions write the same data. Moreover, you can quickly end up with a huge disk space overhead.
Data versioning and locking are two different visions: optimistic locking vs pessimistic locking. They both have pros and cons; it really depends on the use case (more reads vs more writes). For a presentation on data versioning, I recommend this very good presentation on how PostgreSQL implements multiversion concurrency control.
Some databases like DB2 (until DB2 9.7) and SQL Server (except for snapshot isolation) are only using locks. Other like PostgreSQL, MySQL and Oracle use a mixed approach involving locks and data versioning. I’m not aware of a database using only data versioning (if you know a database based on a pure data versioning, feel free to tell me).
[UPDATE 08/20/2015] I was told by a reader that:
Firebird and Interbase use versioning without record locking.
Versioning has an interesting effect on indexes: sometimes a unique index contains duplicates, the index can have more entries than the table has rows, etc.
If you read the part on the different levels of isolation, when you increase the isolation level you increase the number of locks and therefore the time wasted by transactions to wait for their locks. This is why most databases don’t use the highest isolation level (Serializable) by default.
As always, you can check by yourself in the documentation of the main databases (for exampleMySQL, PostgreSQL or Oracle).
Log manager
We’ve already seen that to increase its performances, a database stores data in memory buffers. But if the server crashes when the transaction is being committed, you’ll lose the data still in memory during the crash, which breaks the Durability of a transaction.
You can write everything on disk but if the server crashes, you’ll end up with the data half written on disk, which breaks the Atomicity of a transaction.
Any modification written by a transaction must be undone or finished.
To deal with this problem, there are 2 ways:
- Shadow copies/pages: Each transaction creates its own copy of the database (or just a part of the database) and works on this copy. In case of error, the copy is removed. In case of success, the database switches instantly the data from the copy with a filesystem trick then it removes the “old” data.
- Transaction log: A transaction log is a storage space. Before each write on disk, the database writes an info on the transaction log so that in case of crash/cancel of a transaction, the database knows how to remove (or finish) the unfinished transaction.
WAL
The shadow copies/pages creates a huge disk overhead when used on large databases involving many transactions. That’s why modern databases use a transaction log. The transaction log must be stored on a stable storage. I won’t go deeper on storage technologies but using (at least) RAID disks is mandatory to prevent from a disk failure.
Most databases (at least Oracle, SQL Server, DB2, PostgreSQL, MySQL and SQLite) deal with the transaction log using the Write-Ahead Logging protocol (WAL). The WAL protocol is a set of 3 rules:
- 1) Each modification into the database produces a log record, and the log record must be written into the transaction log before the data is written on disk.
- 2) The log records must be written in order; a log record A that happens before a log record B must but written before B
- 3) When a transaction is committed, the commit order must be written on the transaction log before the transaction ends up successfully.

This job is done by a log manager. An easy way to see it is that between the cache manager and the data access manager (that writes data on disk) the log manager writes every update/delete/create/commit/rollback on the transaction log before they’re written on disk. Easy, right?
WRONG ANSWER! After all we’ve been through, you should know that everything related to a database is cursed by the “database effect”. More seriously, the problem is to find a way to write logs while keeping good performances. If the writes on the transaction log are too slow they will slow down everything.
ARIES
In 1992, IBM researchers “invented” an enhanced version of WAL called ARIES. ARIES is more or less used by most modern databases. The logic might not be the same but the concepts behind ARIES are used everywhere. I put the quotes on invented because, according to this MIT course, the IBM researchers did “nothing more than writing the good practices of transaction recovery”. Since I was 5 when the ARIES paper was published, I don’t care about this old gossip from bitter researchers. In fact, I only put this info to give you a break before we start this last technical part. I’ve read a huge part of the research paper on ARIES and I find it very interesting! In this part I’ll only give you an overview of ARIES but I strongly recommend to read the paper if you want a real knowledge.
ARIES stands for Algorithms for Recovery and Isolation Exploiting Semantics.
The aim of this technique is double:
- 1) Having good performances when writing logs
- 2) Having a fast and reliable recovery
There are multiple reasons a database has to rollback a transaction:
- Because the user cancelled it
- Because of server or network failures
- Because the transaction has broken the integrity of the database (for example you have a UNIQUE constraint on a column and the transaction adds a duplicate)
- Because of deadlocks
Sometimes (for example, in case of network failure), the database can recover the transaction.
How is that possible? To answer this question, we need to understand the information stored in a log record.
The logs
Each operation (add/remove/modify) during a transaction produces a log. This log record is composed of:
- LSN: A unique Log Sequence Number. This LSN is given in a chronological order*. This means that if an operation A happened before an operation B the LSN of log A will be lower than the LSN of log B.
- TransID: the id of the transaction that produced the operation.
- PageID: the location on disk of the modified data. The minimum amount of data on disk is a page so the location of the data is the location of the page that contains the data.
- PrevLSN: A link to the previous log record produced by the same transaction.
- UNDO: a way to remove the effect of the operation
For example, if the operation is an update, the UNDO will store either the value/state of the updated element before the update (physical UNDO) or the reverse operation to go back at the previous state (logical UNDO)**.
- REDO: a way replay the operation
Likewise, there are 2 ways to do that. Either you store the value/state of the element after the operation or the operation itself to replay it.
- …: (FYI, an ARIES log has 2 others fields: the UndoNxtLSN and the Type).
Moreover, each page on disk (that stores the data, not the log) has id of the log record (LSN) of the last operation that modified the data.
*The way the LSN is given is more complicated because it is linked to the way the logs are stored. But the idea remains the same.
**ARIES uses only logical UNDO because it’s a real mess to deal with physical UNDO.
Note: From my little knowledge, only PostgreSQL is not using an UNDO. It uses instead a garbage collector daemon that removes the old versions of data. This is linked to the implementation of the data versioning in PostgreSQL.
To give you a better idea, here is a visual and simplified example of the log records produced by the query “UPDATE FROM PERSON SET AGE = 18;”. Let’s say this query is executed in transaction 18.

Each log has a unique LSN. The logs that are linked belong to the same transaction. The logs are linked in a chronological order (the last log of the linked list is the log of the last operation).
Log Buffer
To avoid that log writing becomes a major bottleneck, a log buffer is used.

When the query executor asks for a modification:
- 1) The cache manager stores the modification in its buffer.
- 2) The log manager stores the associated log in its buffer.
- 3) At this step, the query executor considers the operation is done (and therefore can ask for other modifications)
- 4) Then (later) the log manager writes the log on the transaction log. The decision when to write the log is done by an algorithm.
- 5) Then (later) the cache manager writes the modification on disk. The decision when to write data on disk is done by an algorithm.
When a transaction is committed, it means that for every operation in the transaction the steps 1, 2, 3,4,5 are done. Writing in the transaction log is fast since it’s just “adding a log somewhere in the transaction log” whereas writing data on disk is more complicated because it’s “writing the data in a way that it’s fast to read them”.
STEAL and FORCE policies
For performance reasons the step 5 might be done after the commit because in case of crashes it’s still possible to recover the transaction with the REDO logs. This is called a NO-FORCE policy.
A database can choose a FORCE policy (i.e. step 5 must be done before the commit) to lower the workload during the recovery.
Another issue is to choose whether the data are written step-by-step on disk (STEAL policy)or if the buffer manager needs to wait until the commit order to write everything at once (NO-STEAL). The choice between STEAL and NO-STEAL depends on what you want: fast writing with a long recovery using UNDO logs or fast recovery?
Here is a summary of the impact of these policies on recovery:
- STEAL/NO-FORCE needs UNDO and REDO: highest performances but gives more complex logs and recovery processes (like ARIES). This is the choice made by most databases. Note: I read this fact on multiple research papers and courses but I couldn’t find it (explicitly) on the official documentations.
- STEAL/ FORCE needs only UNDO.
- NO-STEAL/NO-FORCE needs only REDO.
- NO-STEAL/FORCE needs nothing: worst performances and a huge amount of ram is needed.
The recovery part
Ok, so we have nice logs, let’s use them!
Let’s say the new intern has crashed the database (rule n°1: it’s always the intern’s fault). You restart the database and the recovery process begins.
ARIES recovers from a crash in three passes:
- 1) The Analysis pass: The recovery process reads the full transaction log* to recreate the timeline of what was happening during the crash. It determines which transactions to rollback (all the transactions without a commit order are rolled back) and which data needed to be written on disk at the time of the crash.
- 2) The Redo pass: This pass starts from a log record determined during analysis, and uses the REDO to update the database to the state it was before the crash.
During the redo phase, the REDO logs are processed in a chronological order (using the LSN).
For each log, the recovery process reads the LSN of the page on disk containing the data to modify.
If LSN(page_on_disk)>=LSN(log_record), it means that the data has already been written on disk before the crash (but the value was overwritten by an operation that happened after the log and before the crash) so nothing is done.
If LSN(page_on_disk)<LSN(log_record) then the page on disk is updated.
The redo is done even for the transactions that are going to be rolled back because it simplifies the recovery process (but I’m sure modern databases don’t do that).
- 3) The Undo pass: This pass rolls back all transactions that were incomplete at the time of the crash. The rollback starts with the last logs of each transaction and processes the UNDO logs in an anti-chronological order (using the PrevLSN of the log records).
During the recovery, the transaction log must be warned of the actions made by the recovery process so that the data written on disk are synchronized with what’s written in the transaction log. A solution could be to remove the log records of the transactions that are being undone but that’s very difficult. Instead, ARIES writes compensation logs in the transaction log that delete logically the log records of the transactions being removed.
When a transaction is cancelled “manually” or by the lock manager (to stop a deadlock) or just because of a network failure, then the analysis pass is not needed. Indeed, the information about what to REDO and UNDO is available in 2 in-memory tables:
- a transaction table (stores the state of all current transactions)
- a dirty page table (stores which data need to be written on disk).
These tables are updated by the cache manager and the transaction manager for each new transaction event. Since they are in-memory, they are destroyed when the database crashes.
The job of the analysis phase is to recreate both tables after a crash using the information in the transaction log. *To speed up the analysis pass, ARIES provides the notion of checkpoint. The idea is to write on disk from time to time the content of the transaction table and the dirty page table and the last LSN at the time of this write so that during the analysis pass, only the logs after this LSN are analyzed.
To conclude
Before writing this article, I knew how big the subject was and I knew it would take time to write an in-depth article about it. It turned out that I was very optimistic and I spent twice more time than expected, but I learned a lot.
If you want a good overview about databases, I recommend reading the research paper “Architecture of a Database System “. This is a good introduction on databases (110 pages) and for once it’s readable by non-CS guys. This paper helped me a lot to find a plan for this article and it’s not focused on data structures and algorithms like my article but more on the architecture concepts.
If you read this article carefully you should now understand how powerful a database is. Since it was a very long article, let me remind you about what we’ve seen:
- an overview of the B+Tree indexes
- a global overview of a database
- an overview of the cost based optimization with a strong focus on join operators
- an overview of the buffer pool management
- an overview of the transaction management
But a database contains even more cleverness. For example, I didn’t speak about some touchy problems like:
- how to manage clustered databases and global transactions
- how to take a snapshot when the database is still running
- how to efficiently store (and compress) data
- how to manage memory
So, think twice when you have to choose between a buggy NoSQL database and a rock-solid relational database. Don’t get me wrong, some NoSQL databases are great. But they’re still young and answering specific problems that concern a few applications.
To conclude, if someone asks you how a database works, instead of running away you’ll now be able to answer:

Otherwise you can give him/her this article.

















 1121
1121

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









