






 本文详细介绍了如何下载并安装OpenCV 2.4.10版本,以及在VS2010中进行全局和局部配置的具体步骤。包括添加头文件、动态链接库和静态链接库的路径,以及如何正确引用库文件,确保C++程序能够顺利调用OpenCV库。
本文详细介绍了如何下载并安装OpenCV 2.4.10版本,以及在VS2010中进行全局和局部配置的具体步骤。包括添加头文件、动态链接库和静态链接库的路径,以及如何正确引用库文件,确保C++程序能够顺利调用OpenCV库。
1、下载及安装
下载2.4.10版,安装包其实就是一个压缩包,安装过程就是解压到某个文件夹。
下载地址:
链接:https://pan.baidu.com/s/1oI4EZq3C6Cf8fLixsKUX_A
提取码:skai
安装到 C:\opencv 目录,安装后文件夹如下:

我们只需要关注“build”文件夹即可,其他的可以不用管。“build”文件夹编译后的文件,我们可以直接使用。打开“build”文件夹,如下

编写过C++程序的都知道,要使用别人的编写好的DLL,那么需要三种文件,即头文件、后缀名为“lib”的链接文件,后缀名为"dll"的动态库文件。如果使用静态编译方式,那么需要头文件和静态库文件。X86是32位操作系统的库,X64是64位操作系统的库。
(1)“build\x86\vc10\bin”目录下放的是OpenCV运行时所需的动态运行库,
(2)“build\x86\vc10\lib”目录放的是编译OpenCV程序时所需的的动态链接库,
(3)“build\x86\vc10\staticlib”目录方式的静态编译时OpenCV所需要的静态链接库,如果是静态编译,运行时则不需要“build\x86\vc10\bin”目录的DLL文件,但编译后的文件较大。
由于我使用VS2010,所以只关注目录 E:\Soft\opencv\build\x86\vc10 。为了使VS2010可以编译OpenCV程序,我们需要对VS2010做一些设置,主要是让VS2010能找到OpenCV的头文件和链接库。在“OpenCV安装目录\build\docs”目录下有个名为“opencv_tutorials.pdf”的PDF文档,里面的1.5节“How to build application with OpenCV inside the Micorosoft Visual Studio”说明了如何配置VS2010。
2.opencv在VS中的配置
opencv在vs中的配置分global和local两种方式,global的方式为VS的系统属性,对所有工程可用,local的方式只对当前工程的配置有效。
local 方式:
在VS中新建一个工程,在项目->属性->C++目录中添加opencv的路径:
可执行文件目录添加 I:\opencv\build\x64\vc10\bin,这里面有很多opencv各个库的动态链接库的dll文件。包含目录中添加
C: \opencv\build\include
C: \opencv\build\include\opencv
C: \opencv\build\include\opencv2
虽然opencv,opencv2在include下,但这三个路径都要添加,否则有一些.h或者.hpp文件会找不到。 而在VS中使用opencv时,需要在程序开头包含这些头文件
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
using namespace cv;
库目录中添加 C:\opencv\build\x64\vc10\lib 这些lib文件使得C++在调用opencv的dll文件时能够找到对应的位置,如果是32位的电脑要把x64改成x86
此外还要在项目->属性->链接器->输入中加入对应lib文件的名字:
opencv_core2410d.lib
opencv_highgui2410d.lib
opencv_imgproc2410d.lib
opencv_ml2410d.lib
比如当我们使用opencv中的ml库,就需要在这里加入lib文件,在C++代码中加入对应的头文件
#include <opencv2/ml/ml.hpp>
这样你的C++代码就能找到opencv中的machine learning 库并调用相关的 函数了
注意VS的工程是分debug和realease模式的,local的方法不同模式下要分别配置,还有就是如果你opencv装的是64位的,在项目属性页中的活动方案解决平台配置管理也要改成64位才能用。 否则编译能过,生成解决方案的时候就会报错。
global 方式:
如果采用local方式要对每个工程分别配置一遍,如果需要建很多工程的时候推荐使用global方式配置:
在VS中 视图->属性管理器 找到你要使用的模式 debug或者realease ,以及你使用的是win32还是x64, 在对应的.user文件中进行同local的一遍操作:可执行目录,包含目录,库目录的添加,lib文件的添加,这样以后你的每个工程都会默认包含这些路径.
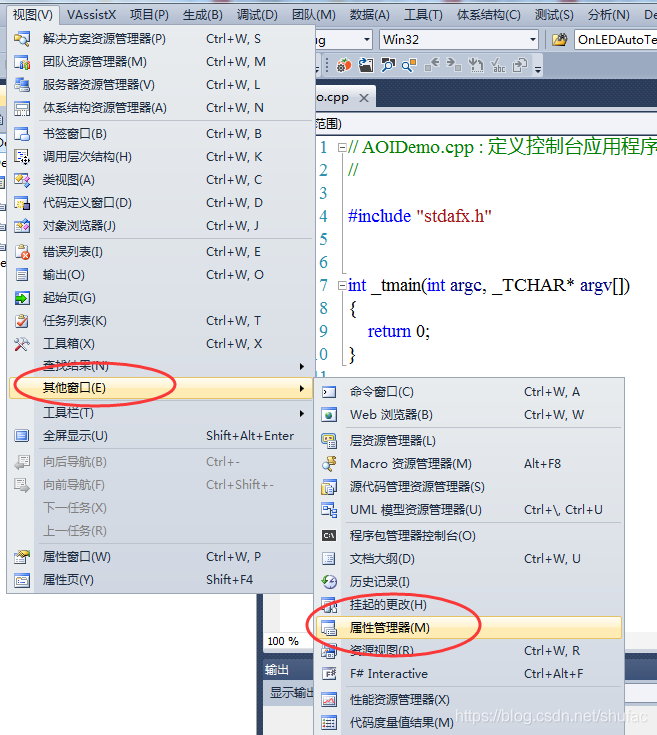
打开的属性管理器窗口如下:

2、在打开的属性管理器窗口中,展开“Degug|Win32”节点,双击“Micorsoft.Cpp.Win32.user”会打开全局属性设置窗口,
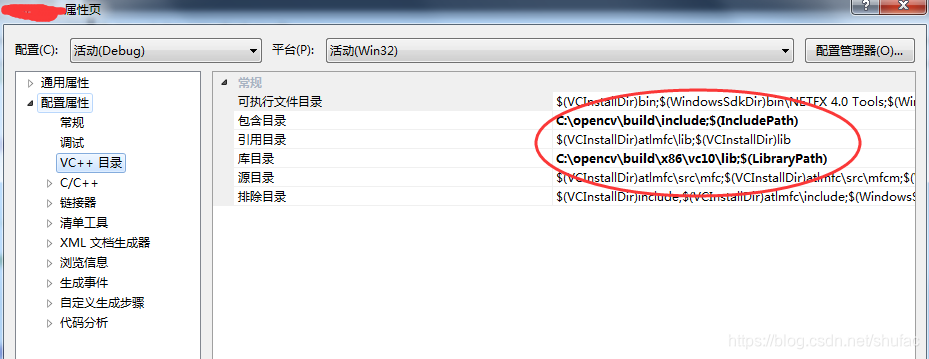
(1)在左边选择“VC++目录”;
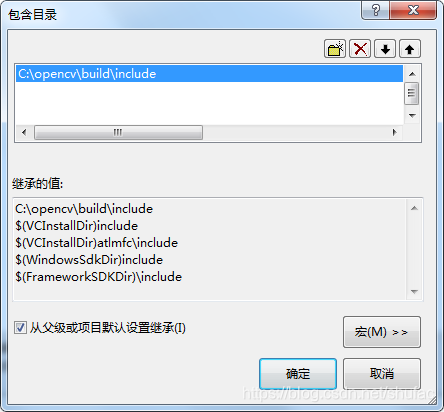
(2)在右边“包含目录”中加上OpenCV的头文件目录,我的头文件目录是放在“C:\opencv\build\include”,这个根据OpenCV的安装目录,一般在build\include目录;
(3)在右边“库目录”中加上OpenCV的链接库目录,我的VS2010库目录是放在“C:\opencv\build\x86\vc10\lib”,这个是根据OpenCV的安装目录和IDE版本决定,根据自己的情况选择。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











