









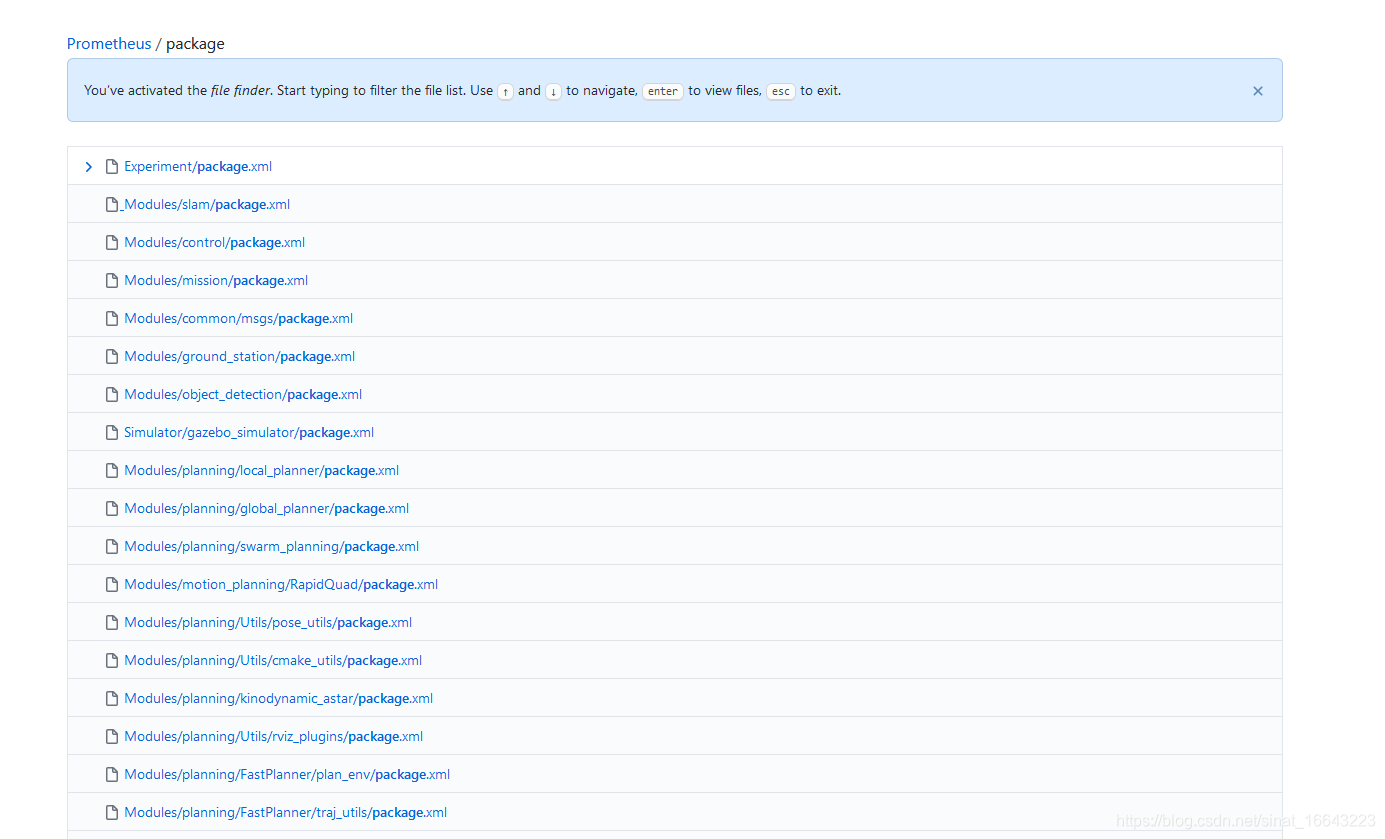
要清楚一个工程里有哪些有多少个ROS功能包,最快的方法就是直接在工程里搜索package.xml,搜CMakeLists.txt也是可以的。package.xml有一个风险就是可能是工作空间的package.xml,不是功能包的package.xml,CMakeLists.txt应该就是功能包的,而且第二行就应该有功能包的名称。
当然万一可能是普通的C++工程呢?当然上面这种方法应该也是个不错的方法,至少比没有好对吧。
这么像XTDrone GAAS 普罗米修斯 有哪些功能包一目了然了。

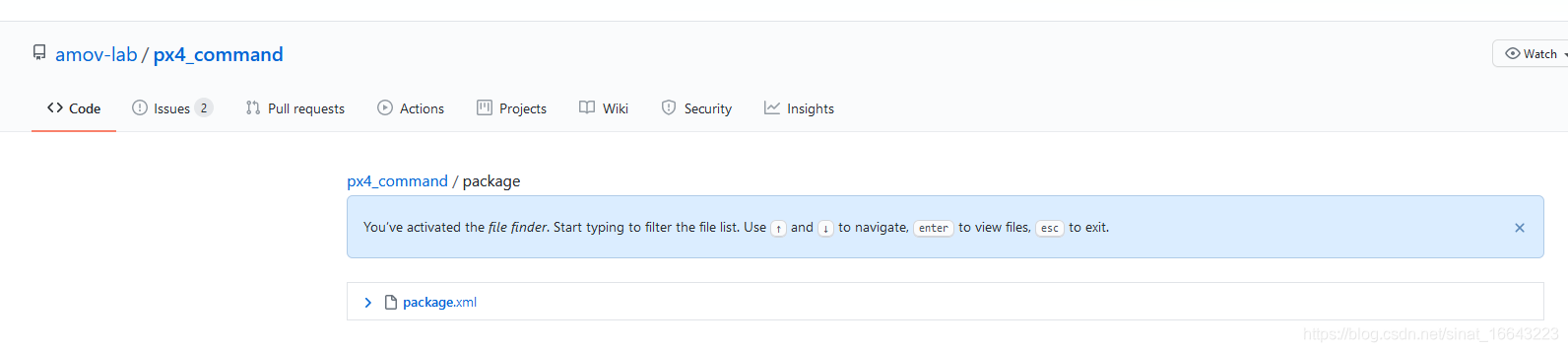
px4_command果然就是一个功能包
https://github.com/amov-lab/px4_command/find/master














 8984
8984











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









