







一、以平面和标记物进行姿态估计
如果图像中包含平面状的标记物体,并且已经对照相机进行了标记,那么我们可以计算出照相机的姿态(旋转和平移。使用平面物体作为标记物,来计算用于新视图投影矩阵。
1、运行结果
将图像的特征好人对其后的标记匹配,计算出单应性矩阵,然后用于计算照相机的姿态。带有一个灰色正方形区域的模板图像,如下图所示:
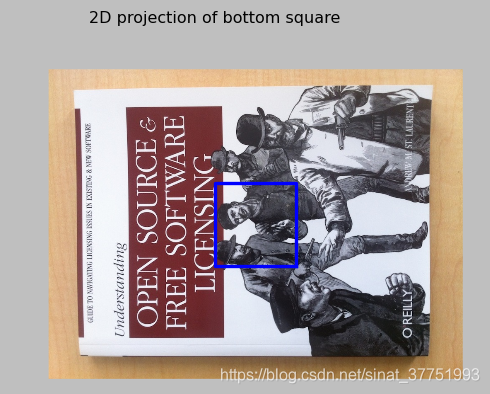
从未知视角拍摄的一幅图像,该图像包含同一个正方形,该正方形已经经过估计的单应性矩阵进行了变换,如下图所示:

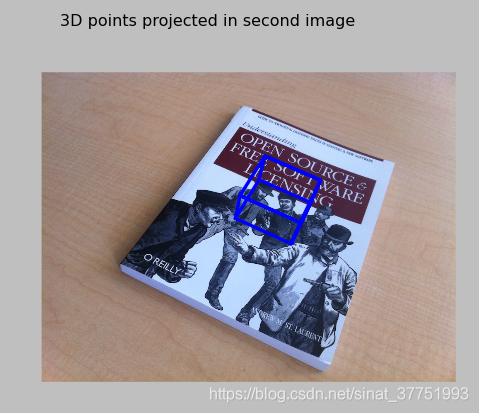
使用计算出的照相机矩阵变换立方体,如下图所示:
2、代码
# -*- coding: cp936 -*-
from pylab import *
from PIL import Image
# If you have PCV installed, these imports should work
from PCV.geometry import homography, camera
from PCV.localdescriptors import sift
"""
This is the augmented reality and pose estimation cube example from Section 4.3.
"""
def cube_points(c, wid):
""" 创建用于绘制立方体的一个点列表(前5个点是底部的正方形,一些边重合了 """
p = []
# 底部
p.append([c[0]-wid, c[1]-wid, c[2]-wid])
p.append([c[0]-wid, c[1]+wid, c[2]-wid])
p.append([c[0]+wid, c[1]+wid, c[2]-wid])
p.append([c[0]+wid, c[1]-wid, c[2]-wid])
p.append([c[0]-wid, c[1]-wid, c[2]-wid]) #为了绘制闭合图像,和第一个相同
# 顶部
p.append([c[0]-wid, c[1]-wid, c[2]+wid])
p.append([c[0]-wid, c[1]+wid, c[2]+wid 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 4391
4391











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









