







资料下载
coding无法使用浏览器打开,必须用git工具下载:
git clone https://e.coding.net/weidongshan/linux/doc_and_source_for_drivers.git
视频观看
Pincontroller构造过程情景分析_基于IMX6ULL
参考资料:
- Linux 4.x内核文档
- Documentation\pinctrl.txt
- Documentation\devicetree\bindings\pinctrl\pinctrl-bindings.txt
- arch/arm/boot/dts/imx6ull-14x14-evk.dts
- arch/arm/boot/dts/100ask_imx6ull-14x14.dts
- drivers\pinctrl\freescale\pinctrl-imx6ul.c
- drivers\pinctrl\freescale\pinctrl-imx.c
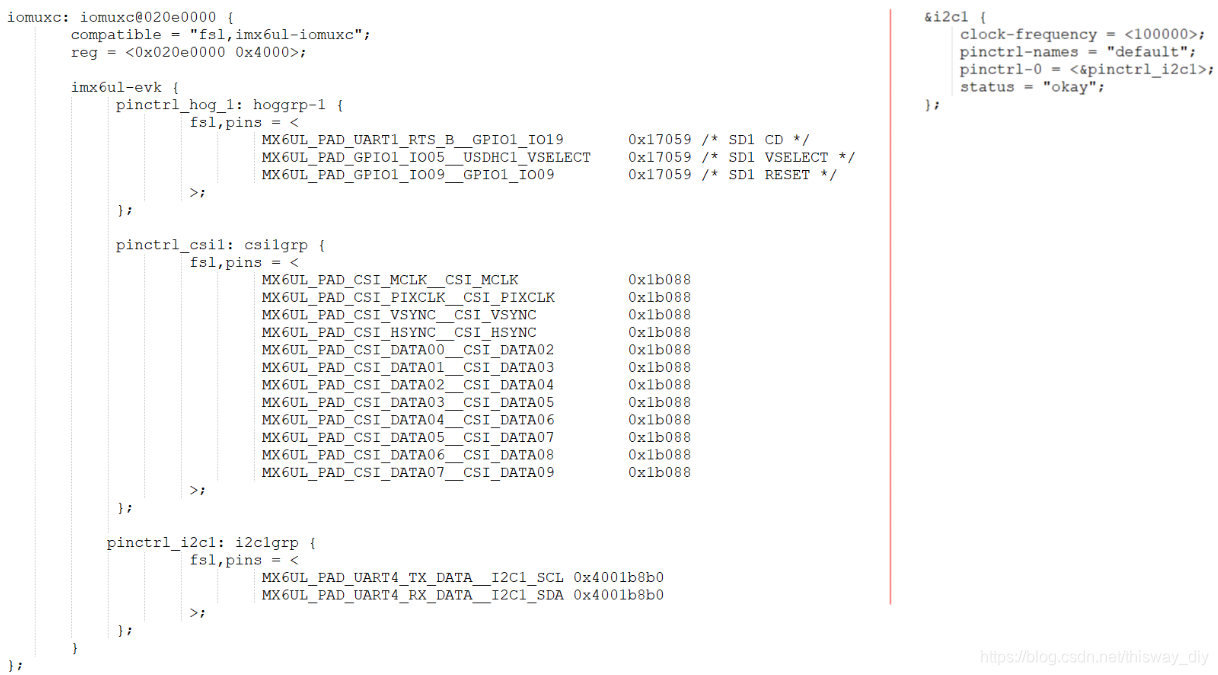
1. 设备树
2. 驱动代码执行流程
驱动程序位置:
drivers\pinctrl\freescale\pinctrl-imx6ul.c
drivers\pinctrl\freescale\pinctrl-imx.c
调用过程:
imx6ul_pinctrl_probe
imx_pinctrl_probe(pdev, pinctrl_info);
imx_pinctrl_desc->name = dev_name(&pdev->dev);
imx_pinctrl_desc->pins = info->pins;
imx_pinctrl_desc->npins = info->npins;
imx_pinctrl_desc->pctlops = &imx_pctrl_ops;
imx_pinctrl_desc->pmxops = &imx_pmx_ops;
imx_pinctrl_desc->confops = &imx_pinconf_ops;
imx_pinctrl_desc->owner = THIS_MODULE;
ret = imx_pinctrl_probe_dt(pdev, info);
ipctl->pctl = devm_pinctrl_register(&pdev->dev,
imx_pinctrl_desc, ipctl);
3. 作用1:描述、获得引脚:解析设备树
3.1 单个引脚
imx_pinctrl_desc->pins = info->pins;
imx_pinctrl_desc->npins = info->npins;
可以在开发板上查看:
/sys/kernel/debug/pinctrl/20e0000.iomuxc]# cat pins
3.2 某组引脚
static const struct pinctrl_ops imx_pctrl_ops = {
.get_groups_count = imx_get_groups_count,
.get_group_name = imx_get_group_name,
.get_group_pins = imx_get_group_pins,
.pin_dbg_show = imx_pin_dbg_show,
.dt_node_to_map = imx_dt_node_to_map,
.dt_free_map = imx_dt_free_map,
};
某组引脚中,有哪些引脚?这要分析设备树:imx_pinctrl_probe_dt。
[root@100ask:/sys/kernel/debug/pinctrl/20e0000.iomuxc]# cat pingroups
3.3 设备树解析情景分析
分析:imx_pinctrl_probe_dt
4. 作用2:引脚复用
下节视频讲解。
5. 作用3:引脚配置
下节视频讲解。
设备树解析情景分析
分析:imx_pinctrl_probe_dt
4. 作用2:引脚复用
下节视频讲解。
5. 作用3:引脚配置
下节视频讲解。















 1912
1912











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









