







阻塞型字符设备是驱动中的一个重点。
一、问题:当一个设备无法立刻满足用户的读写请求时应当如何处理?
解答:应用程序通常不关心这种问题,应用程序只是调用 read 或 write 并得到返回值。驱动程序应当(缺省地)阻塞进程,使它进入睡眠,直到请求可以得到满足。
二、阻塞方式
在阻塞型驱动程序中,Read实现方式如下:如果进程调用read,但设备没有数据或数据不足,进程阻塞。当新数据到达后,唤醒被阻塞进程。
在阻塞型驱动程序中,Write实现方式如下:如果进程调用了write,但设备没有足够的空间供其写入数据,进程阻塞。当设备中的数据被读走后,缓冲区中空出部分空间,则唤醒进程。
三、非阻塞方式
阻塞方式是文件读写操作的默认方式,但应用程序员可通过使用O_NONBLOCK标志来人为的设置读写操作为非阻塞方式。
与阻塞方式的区别:
如果设置了O_NONBLOCK标志,read和write的行为是不同的。如果进程在没有数据就绪时调用了read,或者在缓冲区没有空间时调用了write,系统只是简单地返回-EAGAIN,而不会阻塞进程。
下面试阻塞设备的程序(只是在前面使用一块内存模仿字符设备的基础上进行的简单改造,说明原理就好):
备注:文件的打开、释放、定位以及文件的结构体和以前的程序基本相同。
文件的读函数(因为是生产者和消费者的问题,所以从读函数开始比较好)
/*读函数*/
static ssize_t mem_read(struct file *filp, char __user *buf, size_t size, loff_t *ppos)
{
unsigned long p = *ppos;
unsigned int count = size;
int ret = 0;
struct mem_dev *dev = filp->private_data; /*获得设备结构体指针*/
/*判断读位置是否有效*/
if (p >= MEMDEV_SIZE)
return 0;
if (count > MEMDEV_SIZE - p)
count = MEMDEV_SIZE - p;
while (!have_data) /* 没有数据可读,考虑为什么不用if,而用while,中断信号唤醒 */
//have_data是一个布尔变量,
{
if (filp->f_flags & O_NONBLOCK) //判断是否按照非阻塞的方式处理。
return -EAGAIN; //处理方式,直接返回。
wait_event_interruptible(dev->inq,have_data); //进程阻塞咯~~~
//驱动程序本身既不是进程也不是线程,应用程序才是一个进程。
//实际上阻塞是调用驱动程序的应用程序的进程。
} //使用while的原因:
//设备只有一个,加入数据再设备里面,
//那么任何一个进程都可以读,
//原因在于wait_event_interruptible,当有数据的时候会被唤醒,信号也可以唤醒它,
//所以应该再进行检测所以使用while,实际是while和wait_event_interruptible配合。
//唤醒的部分请到124行。这里我理解了好久,突然发现其实还是生产者和消费者的问题。
/*读数据到用户空间*/
if (copy_to_user(buf, (void*)(dev->data + p), count))
{
ret = - EFAULT;
}
else
{
*ppos += count;
ret = count;
printk(KERN_INFO "read %d bytes(s) from %d\n", count, p);
}
have_data = false; /* 表明不再有数据可读 返回一个值告诉没有数据了*/
return ret;
}下面是设备驱动模块加载函数----这一部分中有等待队列的初始化。
/*设备驱动模块加载函数*/
static int memdev_init(void)
{
int result;
int i;
dev_t devno = MKDEV(mem_major, 0);
/* 静态申请设备号*/
if (mem_major)
result = register_chrdev_region(devno, 2, "memdev");
else /* 动态分配设备号 */
{
result = alloc_chrdev_region(&devno, 0, 2, "memdev");
mem_major = MAJOR(devno);
}
if (result < 0)
return result;
/*初始化cdev结构*/
cdev_init(&cdev, &mem_fops);
cdev.owner = THIS_MODULE;
cdev.ops = &mem_fops;
/* 注册字符设备 */
cdev_add(&cdev, MKDEV(mem_major, 0), MEMDEV_NR_DEVS);
/* 为设备描述结构分配内存*/
mem_devp = kmalloc(MEMDEV_NR_DEVS * sizeof(struct mem_dev), GFP_KERNEL);
if (!mem_devp) /*申请失败*/
{
result = - ENOMEM;
goto fail_malloc;
}
memset(mem_devp, 0, sizeof(struct mem_dev));
/*为设备分配内存*/
for (i=0; i < MEMDEV_NR_DEVS; i++)
{
mem_devp[i].size = MEMDEV_SIZE;
mem_devp[i].data = kmalloc(MEMDEV_SIZE, GFP_KERNEL);
memset(mem_devp[i].data, 0, MEMDEV_SIZE);
/*初始化等待队列*/
init_waitqueue_head(&(mem_devp[i].inq));
}
return 0;
fail_malloc:
unregister_chrdev_region(devno, 1);
return result;
}
下面是整个程序的头文件,里面包括等待队列的定义
#ifndef _MEMDEV_H_
#define _MEMDEV_H_
#ifndef MEMDEV_MAJOR
#define MEMDEV_MAJOR 0 /*预设的mem的主设备号*/
#endif
#ifndef MEMDEV_NR_DEVS
#define MEMDEV_NR_DEVS 2 /*设备数*/
#endif
#ifndef MEMDEV_SIZE
#define MEMDEV_SIZE 4096
#endif
/*mem设备描述结构体*/
struct mem_dev
{
char *data;
unsigned long size;
wait_queue_head_t inq; //定义等待队列头
};
#endif /* _MEMDEV_H_ */
下面是写函数的定义---这一部分包含读函数的等待的唤醒。
/*写函数*/
static ssize_t mem_write(struct file *filp, const char __user *buf, size_t size, loff_t *ppos)
{
unsigned long p = *ppos;
unsigned int count = size;
int ret = 0;
struct mem_dev *dev = filp->private_data; /*获得设备结构体指针*/
/*分析和获取有效的写长度*/
if (p >= MEMDEV_SIZE)
return 0;
if (count > MEMDEV_SIZE - p)
count = MEMDEV_SIZE - p;
/*从用户空间写入数据*/
if (copy_from_user(dev->data + p, buf, count))
ret = - EFAULT;
else
{
*ppos += count;
ret = count;
printk(KERN_INFO "written %d bytes(s) from %d\n", count, p);
}
have_data = true; /* 有新的数据可读 */
/* 唤醒读进程 */
wake_up(&(dev->inq));
return ret;
}
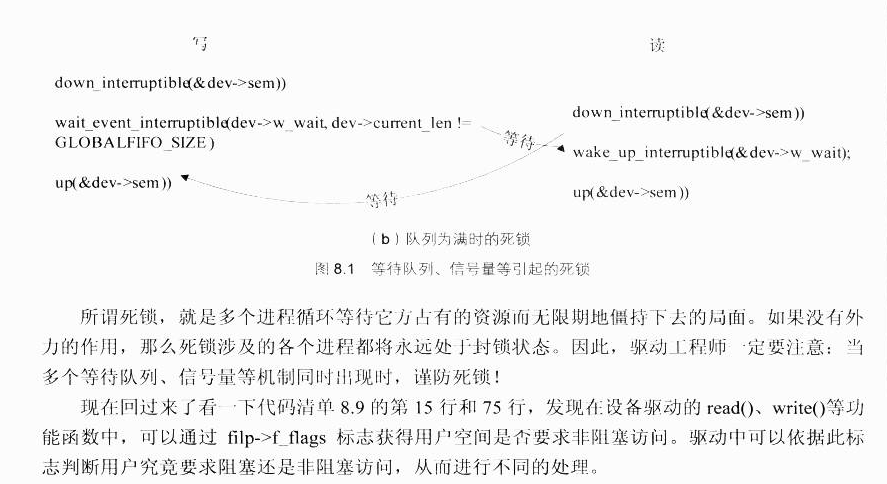
附上两个图来说明死锁:
















 266
266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









