







 本文详细探讨3D坐标变换,介绍了从Oijk到O'i'j'k'坐标的转换公式,涉及矩阵变换和平移。通过推导得出变换的两种方式:先变换坐标架再平移,和平移后再变换。对于特殊情况下O=(0,0,0),i=e1, j=e2, k=e3,变换矩阵简化为M=B。"
124099945,7460041,深入理解MySQL:InnoDB索引原理与优化,"['数据库理论', 'MySQL', '索引']
本文详细探讨3D坐标变换,介绍了从Oijk到O'i'j'k'坐标的转换公式,涉及矩阵变换和平移。通过推导得出变换的两种方式:先变换坐标架再平移,和平移后再变换。对于特殊情况下O=(0,0,0),i=e1, j=e2, k=e3,变换矩阵简化为M=B。"
124099945,7460041,深入理解MySQL:InnoDB索引原理与优化,"['数据库理论', 'MySQL', '索引']
更新 1 [用抽象代数讨论仿射变换和仿射空间中的坐标变换] ,以下是之前的内容。
下面使用行向量:
e1=(1,0,0)
e2=(0,1,0)
e3=(0,0,1)
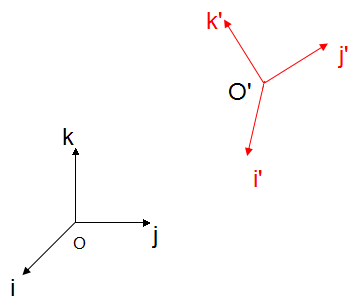
i, j, k是三个线性无关的向量2,它们在e1,e2,e3坐标系下的坐标也记作i,j,k
i’, j’, k’是三个线性无关的向量,它们在e1,e2,e3坐标系下的坐标也记作i’, j’, k’
d e n o t e [ i j k ] = A , [ i ′ j ′ k ′ ] = B denote \quad \begin{bmatrix}i\\j\\k\end{bmatrix}=A,\begin{bmatrix}i'\\j'\\k'\end{bmatrix}=B denote⎣⎡ijk⎦⎤=A,⎣⎡i′j′k′⎦⎤=B
已知点P相对于Oijk的坐标是(x,y,z)
则点P相对于O’i’j’k’的坐标:
( x ′ , y ′ , z ′ ) = ( ( x , y , z ) A + ( O − O ′ ) ) B − 1 (x',y',z')=((x,y,z)A+(O-O'))B^{-1} (x′,y′,z′)=((x,y,z)A+(O−O′))B−1
若B是正交矩阵,就不用求逆了,求转置就是。
特别地,
若O=(0,0,0),i=e1,j=e2,k=e3,则
( x ′ , y ′ , z ′ ) = ( ( x , y , z ) − O ′ ) ) B − 1 (x',y',z')=((x,y,z)-O'))B^{-1} (x′,y′,z′)=((x,y,z)−O′))B−1
##推导
设点P相对于O’i’j’k’的坐标是(x’,y’,z’)
∵ P = O + (
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 7651
7651

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









