







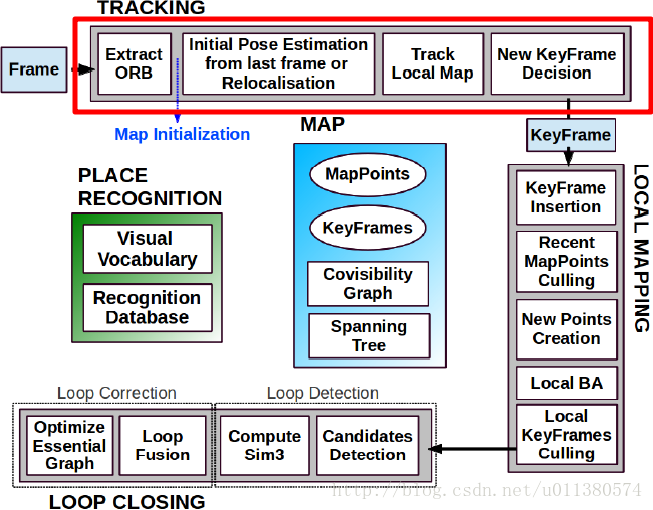
ORB-SLAM2跟踪线程对相机输入的每一帧图像进行跟踪处理,如下图所示,主要包括4步,提取ORB特征、从上一帧或者重定位来估计初始位姿、局部地图跟踪和关键帧处理。
以下结合相关理论知识,阅读ORB-SLAM2源代码,从而理解ORB-SLAM2算法中ORB特征提取过程。
ORB(Oriented FAST and Rotated BRIEF)
基于特征点的方法是SLAM的前端VO的主流方法,因为其运行稳定,对光照、运动物体不敏感。特征点由关键点(Key-point)和描述子(Descriptor)两部分组成。比如,当说到SIFT特征时,是指“提取SIFT关键点,并计算SIFT描述子”。关键点是指该特征点在图像里的位置,有些特征点还具有朝向、大小等信息。描述子通常是一个向量,按照某种人为设计的方式,描述了该关键点周围像素的信息。描述子是按照“外观相似的特征应该有相似的描述子”的原则设计的。因此,只要两个特征点的描述子在向量空间上的距离相近,就可以人为它们是同样的特征点。
常见的特征有SIFT特征,SURF特征等。那么为什么ORB-SLAM2选择ORB特征呢?
这是因为虽然SIFT考虑了图像变换过程中出现的光照、尺寸、旋转等变化,但需要较大计算量,在没有GPU加速的情况下,很难在SLAM这种系统中进行实时计算,另一方面,SIFT特征和SURF特征是受到专利保护的,需要付费使用。
ORB特征由Ethan Rublee, Vincent Rabaud, Kurt Konolige和Gary R. Bradski在他们2011年的论文《ORB: An efficient alternative to SIFT or SURF》提出,如论文题目所述,ORB特征在计算速度、匹配性能,以及在专利要求上都可以替代SIFT和SURF。
ORB取名已经反映出其是一个结合了改良后的FAST角点提取和BRIEF描述子的算法,提取ORB特征分为两步:
FAST关键点提取:找出图像中的FAST角点,相较于原版的FAST,ORB中计算了特征点的主方向,为后续的BRIEF描述子增加了旋转不变性;
BRIEF描述子:对上一步提取出关键点的周围图像区域进行描述。
FAST关键点
FAST是一种角点,主要检测局部像素灰度变化明显的地方,以速度快著称。FAST只需要比较像素亮度大小,速度很快,它的检测过程如下:
在图像中选取像素 p ,假设它的亮度为
Ip ;设置一个阈值 T (比如
Ip 的20%);以像素p为中心,选取半径为3的圆上的16个像素点;
假如选取的圆上有连续的N个点的亮度大于 Ip+T 或者小于 Ip−T ,那么像素 p 可以被认为是特征点(N通常取12,即FAST-12)。
循环以上四步,对每一个像素执行相同的操作。
FAST角点检测虽然速度很快,但是它存在一些问题。首先是FAST角点数量很大且不确定,因此ORB对其进行改进。ORB指定最终要提取的角点数量N,对原始FAST角点分别计算Harris响应值,然后选取前N个具有最大值的角点作为最终的角点集合。
其次,FAST不具有尺寸,因此ORB构建图像金字塔,对图像进行不同层次的降采样,获得不同分辨率的图像,并在金字塔的每一层上检测角点,从而获得多尺寸特征。
FAST没有计算旋转,因此ORB通过计算以FAST角点O为中心的图像块的质心C,那么向量
通过各种改进,FAST特征具有了尺寸和旋转的描述,在ORB中,把这种改进后的FAST称为oFAST。
BRIEF描述子
BRIEF描述子是一种二进制字符描述子,其描述向量定义如下:
其中,
p(x)
是图像块p中点
x
的强度。
BRIEF具有每个bit的方差很大,均值约为0.5的特性,但是“steer BRIEF”丧失了这种特性,其均值不再集中在0.5左右。可以理解为特定方向的角点关键点使得其产生发散。这样会导致使用“steer BRIEF”进行匹配时的错误率变高,因为“steer BRIEF”的方差发生了亏损,彼此之间区分度降低。同时我们希望每个 τ 彼此不相干,这样得到的BRIEF更加有区分度。
为了解决上述问题,BRIEF采用了贪婪搜索,对所有可能的 τ 进行搜索,找出既具有高方差,均值约为0.5,同时又不相干的 τ ,最终结果称为rBRIEF。
由于考虑了旋转和缩放,使得ORB在平移、旋转和缩放的变换下仍具有良好的表现。同时,FAST和BRIEF的计算非常高效,使得ORB特征在实时SLAM系统中得以应用。
以下阅读ORB-SLAM2的源代码,理清其跟踪线程中对ORB特征的提取过程。
函数入口
ORB-SLAM2跟踪运行在主线程,是整个SLAM系统的基础。主程序在初始化SLAM系统后,
// Examples/Monocular/mono_kitti.cc line:53
// Create SLAM system. It initializes all system threads and gets ready to process frames.
ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::MONOCULAR,true);就可以将每一帧图像送往跟踪函数,如下是单目SLAM主函数调用跟踪函数的代码:
// Examples/Monocular/mono_kitti.cc line:84
// Pass the image to the SLAM system
SLAM.TrackMonocular(im,tframe);TrackMonocular()函数调用GrabImageMonocular()函数实现跟踪功能:
// System.cc line:260
cv::Mat Tcw = mpTracker->GrabImageMonocular(im,timestamp);双目和RGB-D调用方式类似,分别是SLAM.TrackStereo(imLeftRect,imRightRect,tframe);和SLAM.TrackRGBD(imRGB,imD,tframe);
mpTracker是System类中的成员,是Tracking类的指针。mpTracker对输入的每一帧图像计算出对应的相机位姿,同时决定何时插入新的关键帧,创建新的地图点,并且在跟踪失效时进行重定位。mpTracker的初始化在System 类的对象SLAM初始化的构造函数中进行:
//System.cc line:86~87
//Initialize the Tracking thread
//(it will live in the main thread of execution, the one that called this constructor)
mpTracker = new Tracking(this, mpVocabulary, mpFrameDrawer, mpMapDrawer,
mpMap, mpKeyFrameDatabase, strSettingsFile, mSensor);那么mpTracker是如何实现上述功能的呢?我们来看Tracking类,其头文件为Tracking.h,其定义了接口如下:
// Tracking.h line:61
// Preprocess the input and call Track(). Extract features and performs stereo matching.
cv::Mat GrabImageMonocular(const cv::Mat &im, const double ×tamp);ORB特征提取
ORB-SLAM2是一个基于特征的方法,它对输入的图像提取出角点的特征,如下图所示:
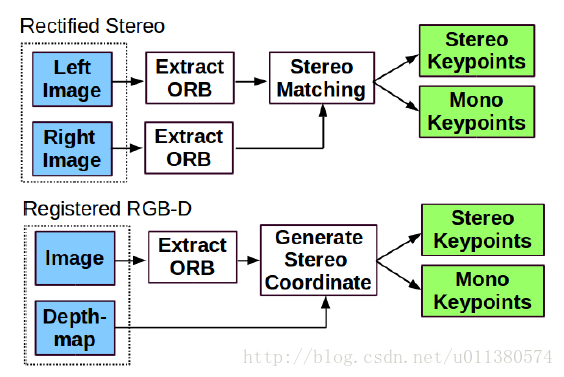
在提取出特征后,所有输入的图片都会删除,系统剩下的处理流程都是基于这些特征进行的,和相机类型无关。
单目的预处理流程实现过程在cv::Mat GrabImageMonocular(const cv::Mat &im, const double ×tamp)函数中体现为:首先将im转换为灰度图mImGray,然后预处理提取ORB特征:
// Tracking.cc line:257~260
if(mState==NOT_INITIALIZED || mState==NO_IMAGES_YET)
mCurrentFrame = Frame(mImGray,timestamp,mpIniORBextractor,mpORBVocabulary,mK,mDistCoef,mbf,mThDepth);
else
mCurrentFrame = Frame(mImGray,timestamp,mpORBextractorLeft,mpORBVocabulary,mK,mDistCoef,mbf,mThDepth);得到预处理的结果mCurrentFrame,从而系统剩余部分的处理流程都是基于mCurrentFrame,和单目相机无关。mCurrentFrame是Frame类的对象,这里的预处理在Frame类的构造函数中进行。Frame类对单目相机输入的构造函数重载形式为:
// Frame.h
// Constructor for Monocular cameras.
Frame(const cv::Mat &imGray, const double &timeStamp, ORBextractor* extractor,ORBVocabulary* voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth);在Frame.cc文件中查看其该重载函数定义,
// Frame.cc line:181~191
// Scale Level Info
mnScaleLevels = mpORBextractorLeft->GetLevels();
mfScaleFactor = mpORBextractorLeft->GetScaleFactor();
mfLogScaleFactor = log(mfScaleFactor);
mvScaleFactors = mpORBextractorLeft->GetScaleFactors();
mvInvScaleFactors = mpORBextractorLeft->GetInverseScaleFactors();
mvLevelSigma2 = mpORBextractorLeft->GetScaleSigmaSquares();
mvInvLevelSigma2 = mpORBextractorLeft->GetInverseScaleSigmaSquares();
// ORB extraction
ExtractORB(0,imGray);其先提取ORB特征参数,然后调用Frame类成员函数ExtractORB()来提取ORB特征,ORB特征参数存储在配置文件中,在mpTracker的初始化中加载读入,并传入Frame的构造函数中。
ExtractORB()函数定义为:
// Frame.cc line:247~253
// Extract ORB on the image. 0 for left image and 1 for right image.
void Frame::ExtractORB(int flag, const cv::Mat &im)
{
if(flag==0)
(*mpORBextractorLeft)(im,cv::Mat(),mvKeys,mDescriptors);
else
(*mpORBextractorRight)(im,cv::Mat(),mvKeysRight,mDescriptorsRight);
}其调用了ORBextractor类的重载运算符来提取ORB特征:
// ORBextractor.h line:56~61
// Compute the ORB features and descriptors on an image.
// ORB are dispersed on the image using an octree.
// Mask is ignored in the current implementation.
void operator()( cv::InputArray image, cv::InputArray mask,
std::vector<cv::KeyPoint>& keypoints,
cv::OutputArray descriptors);ORB-SLAM提取ORB特征时采用了8层金字塔,尺寸因子为1.2。对于像素为512*384到752*480的图片,提取1000个FAST角点,对于更高的分辨率,提取2000个FAST角点就可以了。
至此,得到当前帧ORB特征点mvKeys和描述子mDescriptors,均是Frame类对象mCurrentFrame的成员变量。提取出特征点后,需要对其去失真UndistortKeyPoints();。同时需要将图片分割为64*48大小的栅格,并将关键点按照位置分配到相应栅格中,从而降低匹配时的复杂度,实现函数为AssignFeaturesToGrid(); 。
参考
[1] Mur-Artal, Raul, Jose Maria Martinez Montiel, and Juan D. Tardos. “ORB-SLAM: a versatile and accurate monocular SLAM system” (PDF).IEEE Transactions on Robotics 31.5 (2015): 1147-1163.
[2] Rublee, Ethan; Rabaud, Vincent; Konolige, Kurt; Bradski, Gary (2011). “ORB: an efficient alternative to SIFT or SURF” (PDF). IEEE International Conference on Computer Vision (ICCV).
[3] 高翔,张涛.“视觉SLAM十四讲”
[4] OBR-SLAM2 github 主页














 3443
3443











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









