







前言
在阅读本文之前,你应该对笛卡尔坐标系和复数有一定了解,我们将从复数的角度来解释旋转。
不过在这之前我们先来看看加法和乘法的另一种思想
加法
在二维平面,你一定学习过函数f(x) 的左右平移变换。
你是不是第一时间想到了“左加右减”?
假设我们使 f(x)向右移动a个单位,并将移动后的函数称为:f(t)
则有
f
(
x
)
=
f
(
t
+
a
)
f(x) = f(t+a)
f(x)=f(t+a)
x
=
t
+
a
x = t+a
x=t+a
t
=
x
−
a
t = x-a
t=x−a
求得变换后函数f(t) = f(x-a)
或许你一时间可能不是很明白这个转换的过程,让我们换个说法。
我们并不移动函数f(x),我们移动坐标轴x。
根据物理上的相对运动,当我们想右移f(x)时可左移x轴。
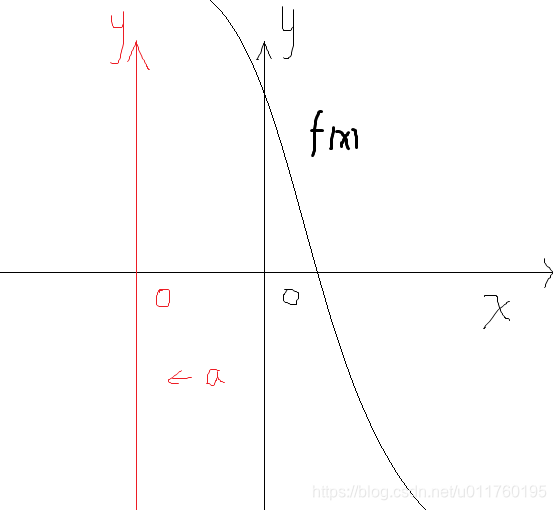
这样,f(x)所有点的x轴长度都增加了a
要求新坐标轴下的点,我们需要将新x减a,变换成原坐标系下的点来求函数的值,也就是f(x-a)
是的,这样一种滑动坐标轴的思想就是我们的加法新思想。
上例中,我们称a为加子。
下面我们来看看乘法
乘法
2*3 = 6,很轻易就能算出来
但是你们是如何思考这个乘法过程的呢?
2+2+....+2
一共有3个2相加
现在让我们换一种思想
我们把2,3放在数轴上来考虑
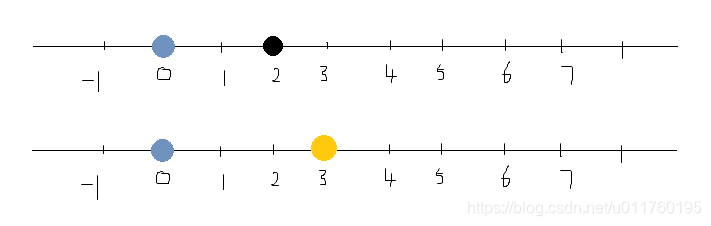
我们分别将1,2数轴看作数字2,3
我们将乘法看成是一种缩放操作

我们将3称为乘子,以O点为缩放原点,将代表2的数轴上的点1缩放至乘子的位置

并根据单位重新刻度,原来数轴上2的位置的值即是乘法结果: 6
那么如果是2*(-3)呢?
下面就是重轴戏。
复平面
复数的定义:
a
+
b
i
a+bi
a+bi
其中
i
2
=
−
1
i^2 = -1
i2=−1
让我们回到 2*(-3)的问题上
我们可以将其变成这种形式:
2
∗
3
i
2
2 * 3i^2
2∗3i2
2
∗
(
3
i
2
+
0
i
)
2 * (3i^2 + 0i)
2∗(3i2+0i)
虚部为零,导致了乘法结果并没有偏离实轴,让我们进一步变换
2
∗
(
0
+
3
i
)
∗
(
0
+
i
)
2 * { (0 + 3i)*(0 + i)}
2∗(0+3i)∗(0+i)
让我们再来看看上面的 2*3
2
∗
(
3
+
0
i
)
2 * (3 + 0i)
2∗(3+0i)
i
2
∗
i
2
=
1
i^2 * i^2 = 1
i2∗i2=1
2
∗
(
3
i
4
+
0
i
)
2 * (3i^4 + 0i)
2∗(3i4+0i)
2
∗
(
0
+
3
i
)
∗
(
0
+
i
)
∗
(
0
+
i
)
∗
(
0
+
i
)
2 * (0+3i)*(0 + i)*(0 + i)*(0 + i)
2∗(0+3i)∗(0+i)∗(0+i)∗(0+i)
你发现了什么?
这看起来,好像2*(-3)少了两次乘子(0 + i)的操作,而缺少这两次乘子导致其落在了数轴的另一侧。
不难想象:两次乘子(0 + i)对应一次数轴的180度旋转。
那么一次(0 + i)就对应了90度的旋转,这也可以解释为什么
i
2
=
−
1
i^2 = -1
i2=−1
于是,2*(-3)可以变换成
2
∗
3
∗
(
0
+
i
)
∗
(
0
+
i
)
2*3*(0+i)*(0+i)
2∗3∗(0+i)∗(0+i)
只需将2*3的结果数轴旋转180度再重新刻度便是最终答案
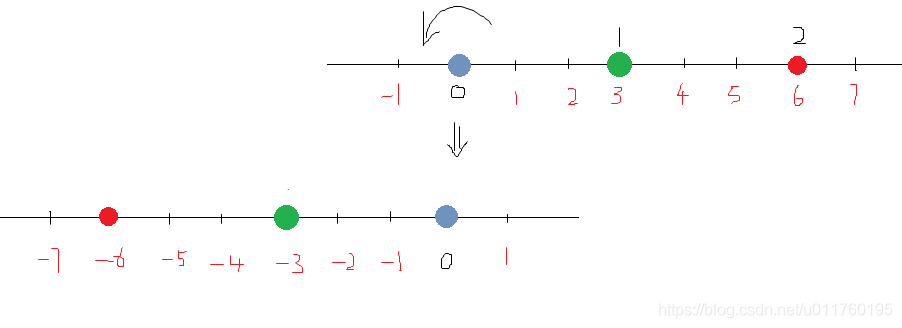
在旋转的过程中数轴滑过的空间,便是这个维度的复数空间
下面我们就以复数为乘子来研究二维平面的旋转
旋转
上例中,我们的乘子是a+bi中的一种特殊情况
现在我们看看更一般的情况:
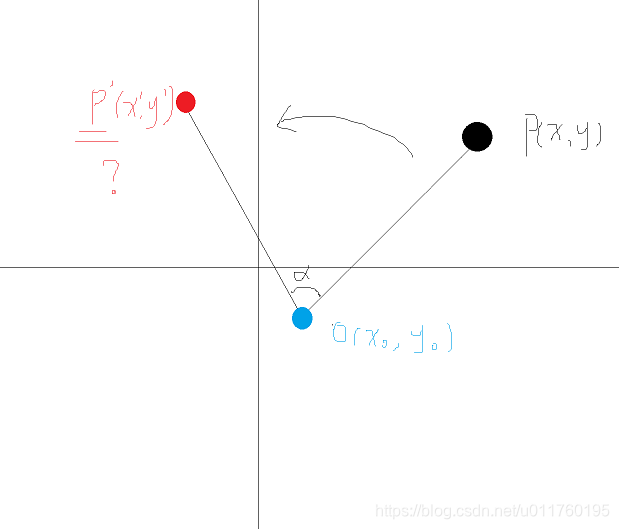
P(x,y),O(xo,yo),逆时针旋转α度,结果点P’(x’,y’)
我们将其转化为复平面上的旋转
我们将坐标系的x轴右移xo,y轴上移yo得到坐标系s’
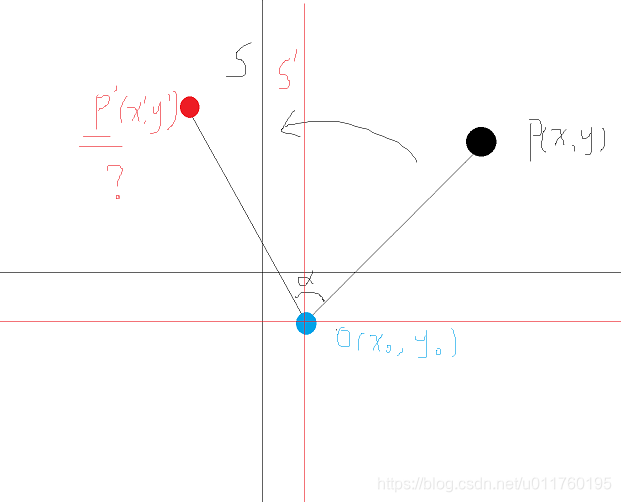
在系s’下,问题变得很简单
旋转α度,仅需乘上一个乘子r
r
=
(
a
+
b
i
)
r = (a+bi)
r=(a+bi)
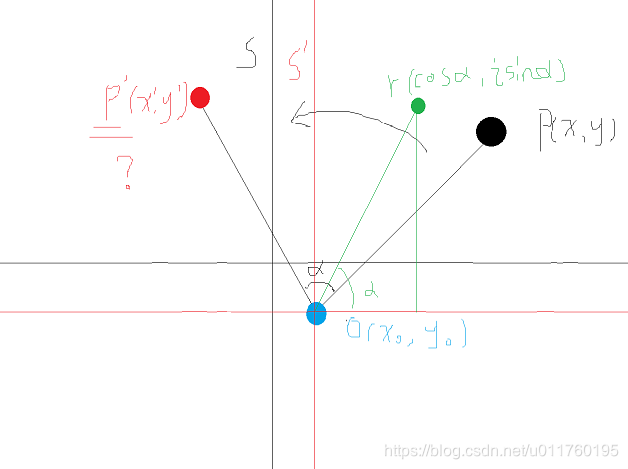
这个乘子对应一个旋转操作,也就是
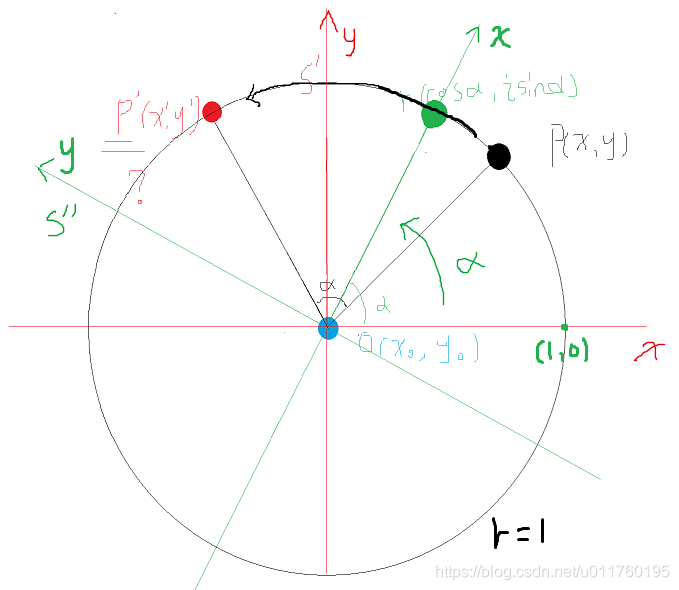
将s’中的(1+0i)点变换到乘子r所在的位置
我们将p所在的系s’通过乘子r来旋转,得到变换后的系s’’,便是p*r的结果
这个乘子的模为1(1是确保本次操作仅仅旋转,不会改变p的模长),辐角为α,不难推导
a
=
c
o
s
α
,
b
=
s
i
n
α
a = cosα , b = sinα
a=cosα,b=sinα
于是
r
=
(
c
o
s
α
+
i
s
i
n
α
)
r = (cosα + isinα)
r=(cosα+isinα)
p
′
=
p
∗
r
p' = p*r
p′=p∗r
即:
(
x
s
′
+
y
s
′
i
)
=
(
x
s
+
y
s
i
)
∗
(
c
o
s
α
+
i
s
i
n
α
)
(x'_s+y'_si) = (x_s+y_si)*(cosα + isinα)
(xs′+ys′i)=(xs+ysi)∗(cosα+isinα)
而此时p及p’的x轴坐标减少了xo,y轴坐标减少了yo
即:
x
s
=
x
−
x
o
,
y
s
=
y
−
y
o
x_s = x -x_o,y_s = y -y_o
xs=x−xo,ys=y−yo
x
s
′
=
x
′
−
x
o
,
y
s
′
=
y
′
−
y
o
x'_s = x' -x_o,y'_s = y' -y_o
xs′=x′−xo,ys′=y′−yo
(
x
′
−
x
o
+
(
y
′
−
y
o
)
i
)
=
(
x
−
x
o
+
(
y
−
y
o
)
i
)
∗
(
c
o
s
α
+
i
s
i
n
α
)
(x' -x_o+(y' -y_o)i) = (x -x_o+(y -y_o)i)*(cosα + isinα)
(x′−xo+(y′−yo)i)=(x−xo+(y−yo)i)∗(cosα+isinα)
也就是:
x
′
=
x
o
+
(
x
−
x
o
)
c
o
s
α
−
(
y
−
y
o
)
s
i
n
α
x'=x_o + (x-x_o)cosα-(y-y_o)sinα
x′=xo+(x−xo)cosα−(y−yo)sinα
y
′
=
y
o
+
(
x
−
x
o
)
s
i
n
α
+
(
y
−
y
o
)
c
o
s
α
y'=y_o + (x-x_o)sinα+(y-y_o)cosα
y′=yo+(x−xo)sinα+(y−yo)cosα
至此,二维平面上点的旋转已经推导完毕,在后面的部分,我们将探索三维空间的旋转,以及复数的扩展 —— 四元数














 5124
5124











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









