







透视投影变换主要用到函数
void vtkAbstractTransform::TransformPoint(
const double in[3],
double out[3]
) in[3]表示输入的旋转矩阵,out[3]表示变换后的举证。
#include <vtkSmartPointer.h>
#include <vtkPerspectiveTransform.h>
#include <vtkTransform.h>
#include <vtkMatrix4x4.h>
int main()
{
vtkSmartPointer<vtkMatrix4x4> m =
vtkSmartPointer<vtkMatrix4x4>::New();
m->SetElement(0, 0, 1);
m->SetElement(0, 1, 2);
m->SetElement(0, 2, 3);
m->SetElement(0, 3, 4);
m->SetElement(1, 0, 2);
m->SetElement(1, 1, 2);
m->SetElement(1, 2, 3);
m->SetElement(1, 3, 4);
m->SetElement(2, 0, 3);
m->SetElement(2, 1, 2);
m->SetElement(2, 2, 3);
m->SetElement(2, 3, 4);
m->SetElement(3, 0, 4);
m->SetElement(3, 1, 2);
m->SetElement(3, 2, 3);
m->SetElement(3, 3, 4);
vtkSmartPointer<vtkPerspectiveTransform> perspectiveTransform =
vtkSmartPointer<vtkPerspectiveTransform>::New();
perspectiveTransform->SetMatrix(m);
vtkSmartPointer<vtkTransform> transform =
vtkSmartPointer<vtkTransform>::New();
transform->SetMatrix(m);
double p[4];
p[0] = 1.0;
p[1] = 2.0;
p[2] = 3.0;
double normalProjection[4];
transform->TransformPoint(p, normalProjection);
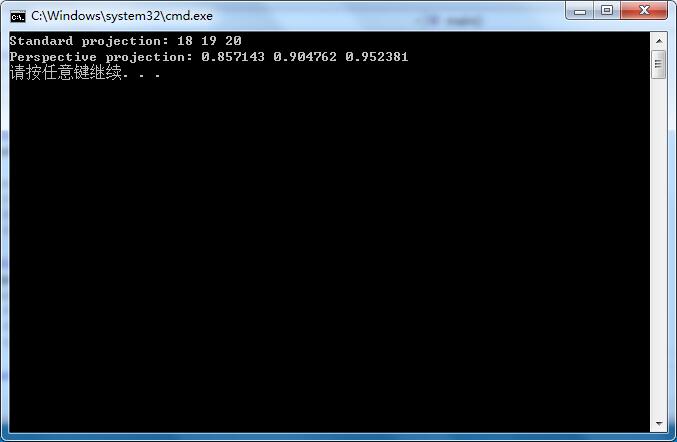
std::cout << "Standard projection: "
<< normalProjection[0] << " "
<< normalProjection[1] << " "
<< normalProjection[2] << std::endl;
double perspectiveProjection[3];
perspectiveTransform->TransformPoint(p, perspectiveProjection);
std::cout << "Perspective projection: "
<< perspectiveProjection[0]
<< " " << perspectiveProjection[1] << " "
<< perspectiveProjection[2] << std::endl;
return 0;
}















 1631
1631

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









