







摘要
本文叙述了在高通平台LK阶段读取mpp2引脚电平的实现过程,附上实现代码。主要实现过程包括配置引脚功能,读取引脚电压。需要特别注意配置mpp2通道和AIN route的选择。
需要修改的文件:
bootable\bootloader\lk\app\aboot\aboot.c
Pm8x41_adc.c (dev\pmic\pm8x41)
Pm8x41_adc.h (dev\pmic\pm8x41\include)

修改过程及例子
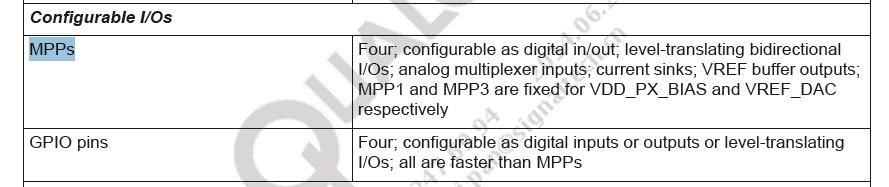
在使用mpp2
引脚之前需要配置这个引脚为ADC
功能,在LK
阶段提供了一个操作函数,在Pm8x41_adc.c (dev\pmic\pm8x41)
中实现。
/*
* API: pm8x41_enable_mpp_as_adc
* Configurate the MPP pin as the ADC feature.
*/
void
pm8x41_enable_mpp_as_adc(uint16_t mpp_num)
注意:mpp2
的mpp_num
值为0x01
!
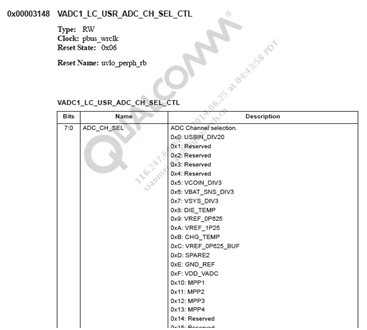
使用pm8x41_adc_channel_read(mpp2_chan);读取该引脚ADC采样得到的电压值
另外
mpp2_chan
的值是33(0x21)
!
这个通道号是根据这个寄存器
VADC1_LC_USR_ADC_CH_SEL_CTL
来的:

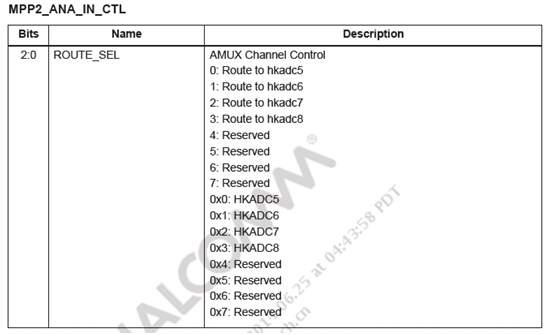
在配置引脚的地方有一个
选择ADC
输入路线选择的地方,根据寄存器信息可知道这里可以选择AMUX5-8!
下面是需要修改的代码:
\bootable\bootloader\lk\app\aboot\aboot.c
- void adc_test_selc_lcm()
- {
- uint32_t vadc_chan3;
- uint16_t mpp2_chan = 33;
- /*
- * TEST: Read the voltage on batt_id & vbat_sns channels
- */
- pm8x41_enable_mpp_as_adc_for_mpp2(1);
- vadc_chan3 = pm8x41_adc_channel_read(mpp2_chan);
- dprintf(INFO, "The channel [%d] voltage is :%d\n",mpp2_chan, vadc_chan3);
- }
- void aboot_init(const struct app_descriptor *app)
- {
- ……
- adc_test_selc_lcm();
- ……
- }

void adc_test_selc_lcm()
{
uint32_t vadc_chan3;
uint16_t mpp2_chan = 33;
/*
* TEST: Read the voltage on batt_id & vbat_sns channels
*/
pm8x41_enable_mpp_as_adc_for_mpp2(1);
vadc_chan3 = pm8x41_adc_channel_read(mpp2_chan);
dprintf(INFO, "The channel [%d] voltage is :%d\n",mpp2_chan, vadc_chan3);
}
void aboot_init(const struct app_descriptor *app)
{
……
adc_test_selc_lcm();
……
}
Pm8x41_adc.c (dev\pmic\pm8x41)
- /*
- * This is the predefined adc configuration values for the supported
- * channels
- */
- static struct adc_conf adc_data[] = {
- CHAN_INIT(VADC_USR1_BASE, VADC_BAT_CHAN_ID, VADC_MODE_NORMAL, VADC_DECIM_RATIO_VAL, HW_SET_DELAY_100US, FAST_AVG_SAMP_1, CALIB_RATIO),
- CHAN_INIT(VADC_USR1_BASE, VADC_BAT_VOL_CHAN_ID, VADC_MODE_NORMAL, VADC_DECIM_RATIO_VAL, HW_SET_DELAY_100US, FAST_AVG_SAMP_1, CALIB_ABS),
- CHAN_INIT(VADC_USR1_BASE, MPP_8_CHAN_ID, VADC_MODE_NORMAL, VADC_DECIM_RATIO_VAL, HW_SET_DELAY_100US, FAST_AVG_SAMP_1, CALIB_ABS),
- CHAN_INIT(VADC_USR1_BASE, MPP_2_CHAN_ID, VADC_MODE_NORMAL, VADC_DECIM_RATIO_VAL, HW_SET_DELAY_100US, FAST_AVG_SAMP_1, CALIB_ABS),
- };
- void pm8x41_enable_mpp_as_adc_for_mpp2(uint16_t mpp_num)
- {
- uint32_t val;
- if(mpp_num >MPP_MAX_NUM)
- {dprintf(CRITICAL,"Error: The MPP pin number is unavailable\n");
- return;}
- /* set the MPP mode as AIN */
- val =(MPP_MODE_AIN <<Q_REG_MODE_SEL_SHIFT)\
- |(0x1<<Q_REG_OUT_INVERT_SHIFT)\
- |(0x0<<Q_REG_SRC_SEL_SHIFT);
- REG_WRITE((MPP_REG_BASE +mpp_num *MPP_REG_RANGE +Q_REG_MODE_CTL),val);
- /* Enable the MPP */
- val =(MPP_MASTER_ENABLE <<Q_REG_MASTER_EN_SHIFT);
- REG_WRITE((MPP_REG_BASE +mpp_num *MPP_REG_RANGE +Q_REG_EN_CTL),val);
- /* AIN route to AMUX8 */
- val =(0x1<<Q_REG_AIN_ROUTE_SHIFT);//AMUX1
- REG_WRITE((MPP_REG_BASE +mpp_num *MPP_REG_RANGE +Q_REG_AIN_CTL),val);
- }
/*
* This is the predefined adc configuration values for the supported
* channels
*/
static struct adc_conf adc_data[] = {
CHAN_INIT(VADC_USR1_BASE, VADC_BAT_CHAN_ID, VADC_MODE_NORMAL, VADC_DECIM_RATIO_VAL, HW_SET_DELAY_100US, FAST_AVG_SAMP_1, CALIB_RATIO),
CHAN_INIT(VADC_USR1_BASE, VADC_BAT_VOL_CHAN_ID, VADC_MODE_NORMAL, VADC_DECIM_RATIO_VAL, HW_SET_DELAY_100US, FAST_AVG_SAMP_1, CALIB_ABS),
CHAN_INIT(VADC_USR1_BASE, MPP_8_CHAN_ID, VADC_MODE_NORMAL, VADC_DECIM_RATIO_VAL, HW_SET_DELAY_100US, FAST_AVG_SAMP_1, CALIB_ABS),
CHAN_INIT(VADC_USR1_BASE, MPP_2_CHAN_ID, VADC_MODE_NORMAL, VADC_DECIM_RATIO_VAL, HW_SET_DELAY_100US, FAST_AVG_SAMP_1, CALIB_ABS),
};
void pm8x41_enable_mpp_as_adc_for_mpp2(uint16_t mpp_num)
{
uint32_t val;
if(mpp_num >MPP_MAX_NUM)
{dprintf(CRITICAL,"Error: The MPP pin number is unavailable\n");
return;}
/* set the MPP mode as AIN */
val =(MPP_MODE_AIN <<Q_REG_MODE_SEL_SHIFT)\
|(0x1<<Q_REG_OUT_INVERT_SHIFT)\
|(0x0<<Q_REG_SRC_SEL_SHIFT);
REG_WRITE((MPP_REG_BASE +mpp_num *MPP_REG_RANGE +Q_REG_MODE_CTL),val);
/* Enable the MPP */
val =(MPP_MASTER_ENABLE <<Q_REG_MASTER_EN_SHIFT);
REG_WRITE((MPP_REG_BASE +mpp_num *MPP_REG_RANGE +Q_REG_EN_CTL),val);
/* AIN route to AMUX8 */
val =(0x1<<Q_REG_AIN_ROUTE_SHIFT);//AMUX1
REG_WRITE((MPP_REG_BASE +mpp_num *MPP_REG_RANGE +Q_REG_AIN_CTL),val);
}
Pm8x41_adc.h (dev\pmic\pm8x41\include)
#define MPP_2_CHAN_ID 33














 3787
3787











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









