









联系方式:860122112@qq.com
一. 实验目的
KinectV2作为视觉输入,获取目标物体以及机械臂各关节在三维空间中的位置,结合几何运动学和数据训练方法实现机械臂自主抓取目标物体。
二. 实验设备

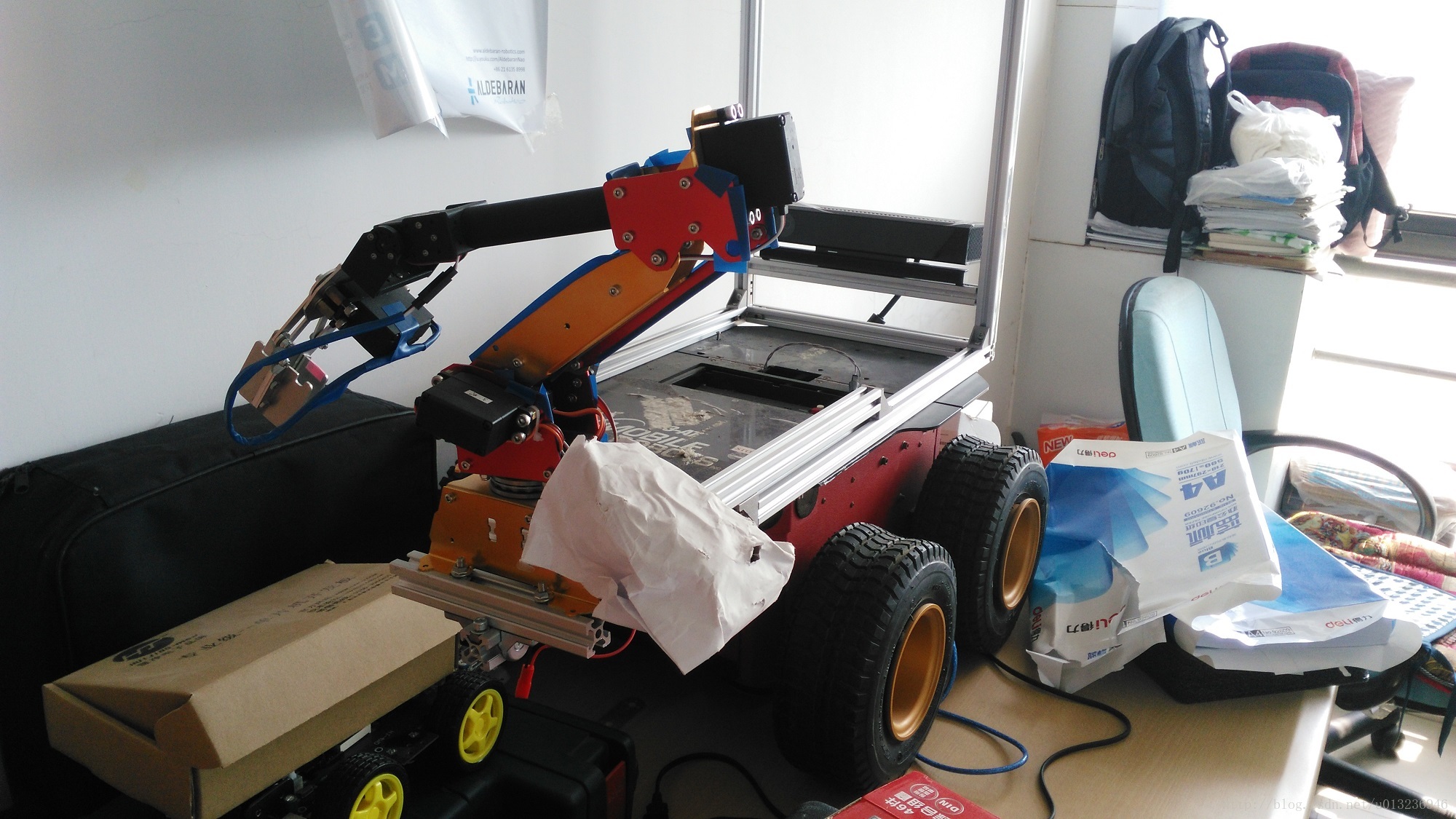
Kinect、六个舵机的五自由度平行四边形机械臂
(安装在Pioneer3移动机器人上)
机械臂
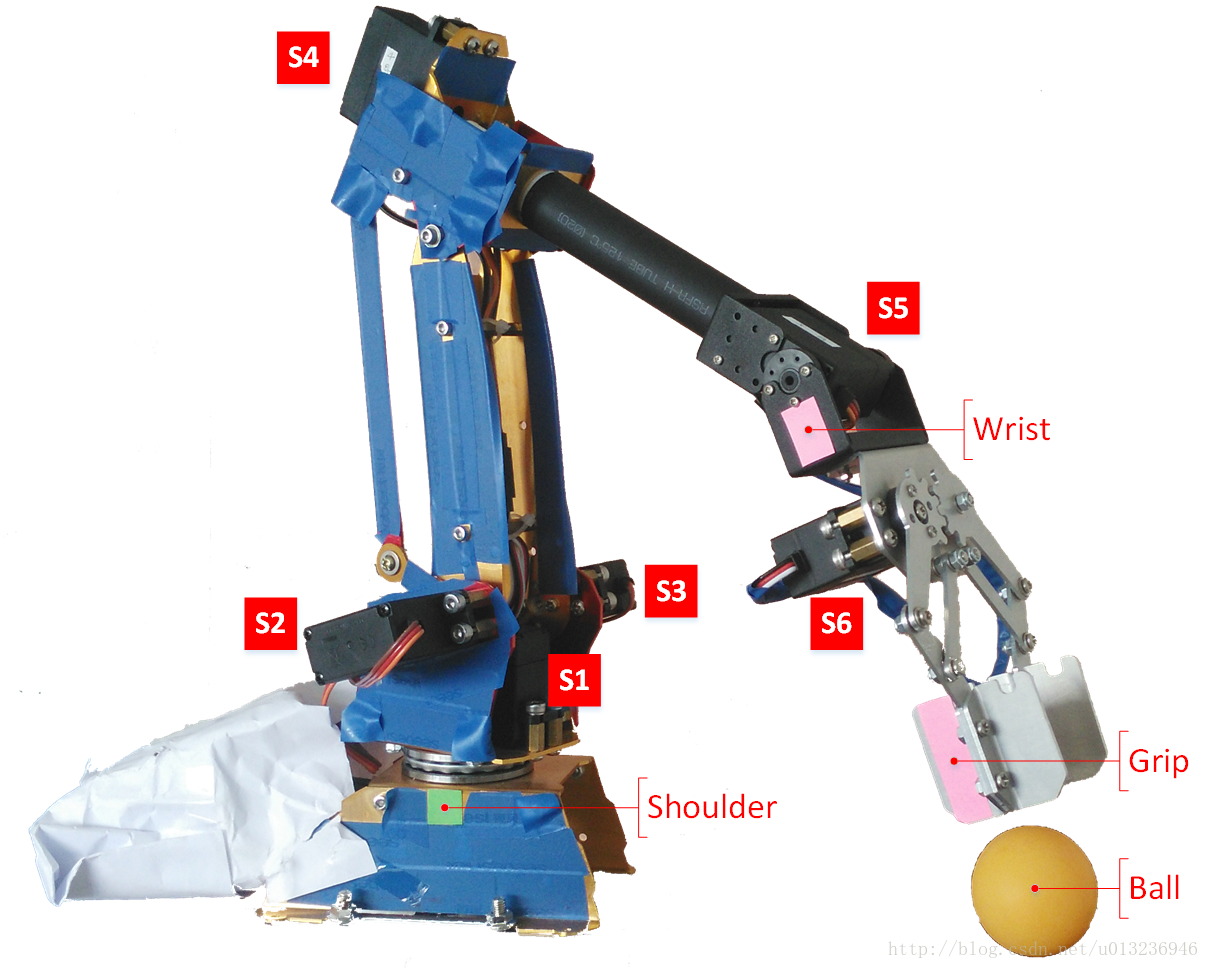
实验使用的机械臂是具有六个舵机的五自由度平行四边形机械臂。如上图所示,S1~S3处舵机分别负责肩部、大臂、小臂的转动,S4~S5负责腕部的两个自由度转动,S6负责抓取。每个舵机的转动范围是500-2500,换算成角度大约是0-180度。
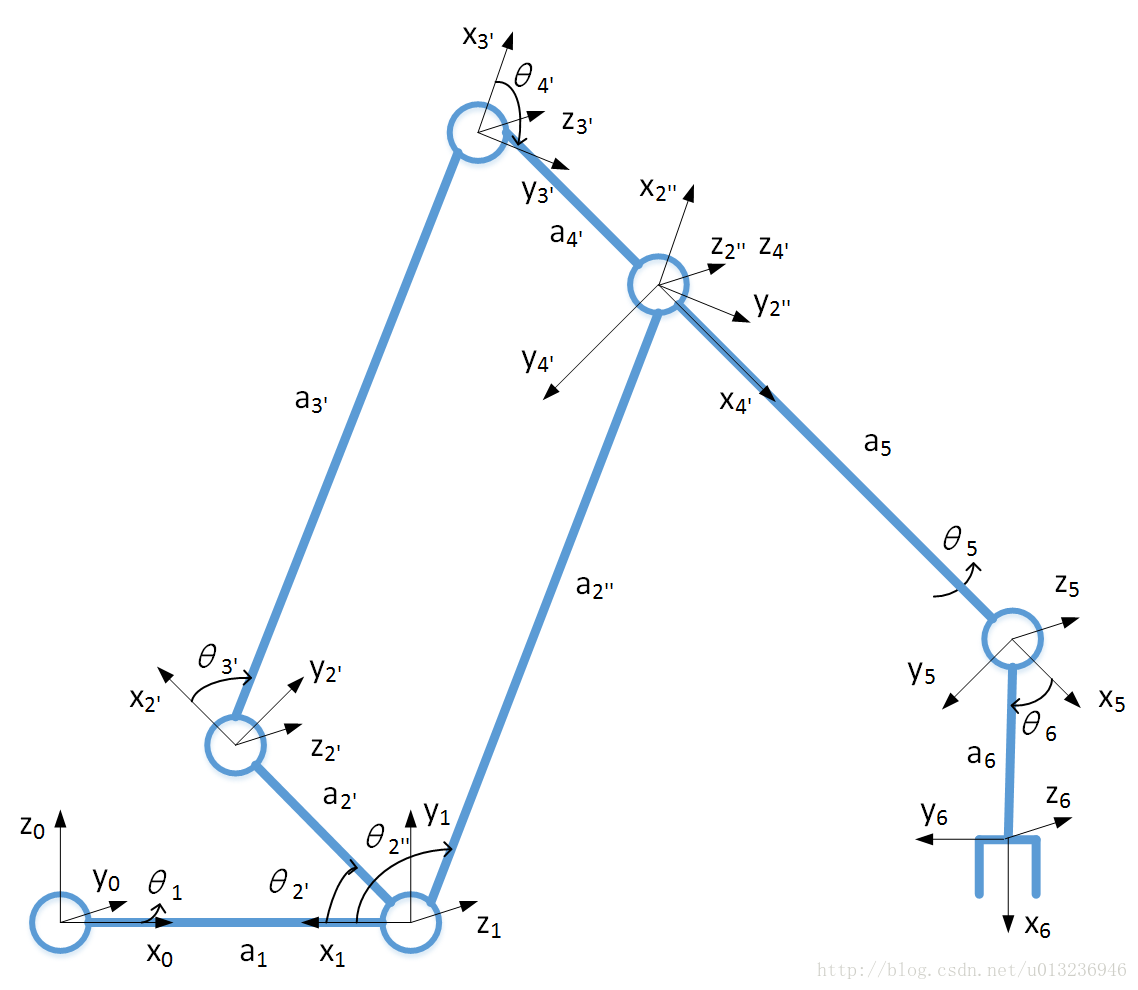
上图是机械臂的结构图,其中舵机S1负责 θ1 ,S2负责 θ2′ ,S3负责 θ2′′ ,S4负责 θ5 ,S5负责 θ6 。
实验只使用机械臂的4个自由度,即始终令 θ5=0° ,且令手爪的姿态始终垂直向下。
三. 算法流程
- 标定机械臂各关节,从KinectV2获取图像,经过处理得到关节点在空间中的坐标,通过几何运动学解算出此时各关节角的角度;
- 从KinectV2获取图像,经过处理得到目标物体位置,通过几何运动学解算出机械臂要抓到物体所要的角度(目标角度);
- 计算目标角度与当前角度的误差,使用反馈控制减少误差;
- 循环1~4步,当误差足够小时即可命令机械臂抓起物体。
以上4步是算法的大致步骤。(除此之外,反馈控制使用的是自己设计的控制器,同时结合了数据训练方法模拟人类抓取物体的方式)
四. 实验结果
机械臂自主抓取物体
height="500" width="800" src="http://player.youku.com/embed/XMjc3OTc2NTE3Ng==">
移动机器人寻迹
height="500" width="800" src="http://player.youku.com/embed/XMjc4NTM2NTQyNA==">














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









