







摄像机标定中的外部参数矩阵,是由旋转矩阵和平移矩阵构成的,旋转矩阵是一个3×3的正交矩阵,有3个自由度。处理旋转矩阵的问题时,通常采用旋转矩阵的方式来描述,也可以用旋转向量来表示,两者之间可以通过罗德里格斯(Rodrigues)变换来进行转换。

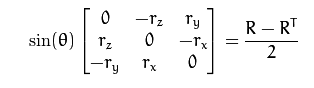
其中,旋转向量的长度(模)表示绕轴逆时针旋转的角度(弧度)。
norm为求向量的模。反变换也可以很容易的通过如下公式实现:
在opencv中的函数为:
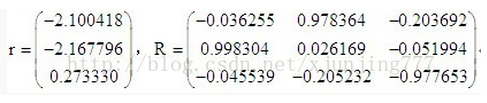
int cvRodrigues2( const CvMat* src, CvMat* dst, CvMat* jacobian=0 );例子如下:














 9569
9569











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









