







转自:http://www.mamicode.com/info-detail-922469.html
简介
BRIEF在2010年《BRIEF:Binary Robust Independent Elementary Features》中提出,BRIEF是对已检测到的特征点进行描述,它是一种二进制编码的描述子,摈弃了利用区域灰度直方图描述特征点的传统方法,大大的加快了特征描述符建立的速度,同时也极大的降低了特征匹配的时间,是一种非常快速,很有潜力的算法。
BRIEF算法
由于BRIEF仅仅是特征描述子,所以事先要得到特征点的位置,可以利用FAST特征点检测算法、Harris角点检测算法、SIFT、SURF等算法检测出特征点的位置。接下来,在特征点邻域利用BRIEF算法建立特征描述符。
算法步骤如下:
1、为减少噪声干扰,先对图像进行高斯滤波(方差为2,高斯窗口为9x9)。
2、以特征点为中心,取SxS的邻域窗口。在窗口中随机选取一对点,比较这两个点的像素值,赋值为1或0,如下:
3、在窗口中随机选取N对点,重复步骤2的二进制赋值,形成一个二进制编码,这个编码就是对特征点的描述,即特征描述子,一般N=256,如下:
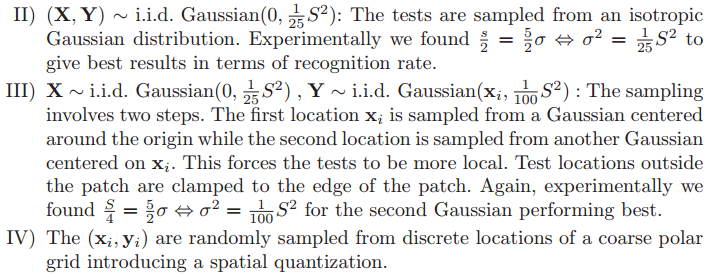
随机点对选择方法
原作者测试了以下5种方法,其中,方法(2)比较好。


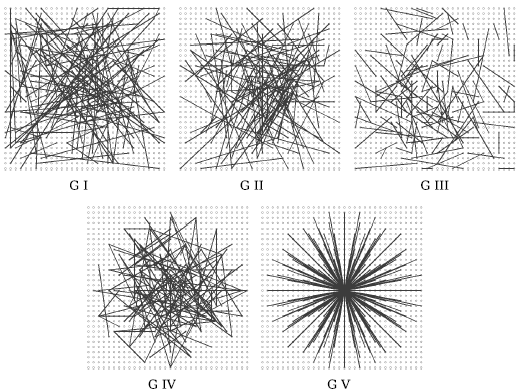
这5种方法生成的256对随机点如下图所示,其中,一条线段的两个端点表示一对随机点
特征点匹配
BRIEF特征描述子是二进制编码,因此,可以利用海明距离来度量两个特征点是否匹配。
分析与总结
该算法能够很快地建立特征描述符,并且减少了特征匹配的时间,但是也存在一些缺点:
1、对噪声敏感(因为二进制编码是通过比较具体像素值来判定的)
2、不具备旋转不变性
3、不具备尺度不变性
代码:
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/features2d/features2d.hpp>
using namespace cv;
int main(int argc, char** argv)
{
Mat img_1 = imread("img1.png");
Mat img_2 = imread("img2.png");
// -- Step 1: Detect the keypoints using STAR Detector
std::vector<KeyPoint> keypoints_1,keypoints_2;
StarDetector detector;
detector.detect(img_1, keypoints_1);
detector.detect(img_2, keypoints_2);
// -- Stpe 2: Calculate descriptors (feature vectors)
BriefDescriptorExtractor brief;
Mat descriptors_1, descriptors_2;
brief.compute(img_1, keypoints_1, descriptors_1);
brief.compute(img_2, keypoints_2, descriptors_2);
//-- Step 3: Matching descriptor vectors with a brute force matcher
BFMatcher matcher(NORM_HAMMING);
std::vector<DMatch> mathces;
matcher.match(descriptors_1, descriptors_2, mathces);
// -- dwaw matches
Mat img_mathes;
drawMatches(img_1, keypoints_1, img_2, keypoints_2, mathces, img_mathes);
// -- show
imshow("Mathces", img_mathes);
waitKey(0);
return 0;
}















 1071
1071

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









