







一个包含控制接口(controller interface)、控制器管理(controller manager)、传输(transmission)、硬件接口(hardware interface)和控制工具箱(control_toolbox)的软件包集。
1.概述
ros_control包重写了 pr2机器人包,使得控制器在所有机器人上通用(除了PR2)
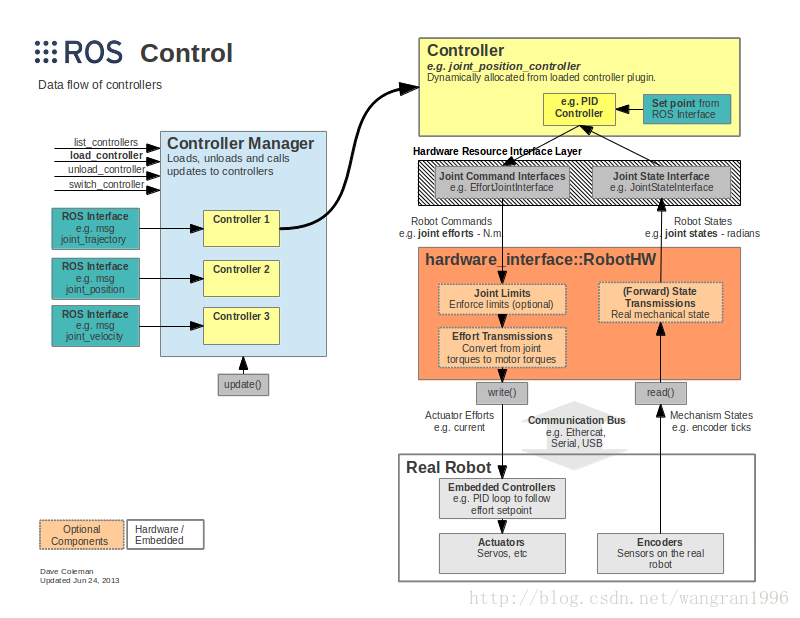
ros_control包作为来自你机器人的编码器执行单元的joint data数据的输入和输入设定点,它使用了一个通用的控制循环回调机制,通常用一个PID controller去控制输出(PID controller可在上位机也可在下位机),发送到执行单元(下位机)。ros_control获取物理的机制,没有一一对应的关节位置映射更复杂。
2.控制器
可以使用的ros_control插件,包含在ros_controllers中,可以自己创建
effort_controllers
joint_effort_controller
jo 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 4656
4656











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









