







参考:http://blog.csdn.net/xingchenbingbuyu/article/details/50836506
环境参数:
vs2010
opencv 2.4.13
雾图模型

I(x) ——待去雾的图像
J(x)——无雾图像
A——全球大气光成分
t——折射率(大气传递系数)
暗通道先验
在无雾图像中,每一个局部区域都很有可能会有阴影,或者是纯颜色的东西,又或者是黑色的东西。因此,每一个局部区域都很有可能有至少一个颜色通道会有很低的值。把这个统计规律叫做Dark Channel Prior。
暗通道定义

Jc表示彩色图像的每个通道
Ω(x)表示以像素X为中心的一个窗口
意义:首先求出每个像素RGB分量中的最小值,存入一副和原始图像大小相同的灰度图中,然后再对这幅灰度图进行最小值滤波
对于两个最小化的顺序,我看了下,何凯明的两遍论文用了不同的顺序。
计算折射率
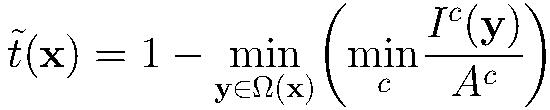
右边第二项其实就是有雾图像的暗通道。
由于空间透视现象/浓淡远近,部分雾的存在有助于我们感知距离和深度,加权值修正:

估计大气光
1.选取暗通道图像暗通道最亮的0.1%的像素(一般来说,这些像素表示雾浓度最大的地方)
2.取输入图像里面这些像素对应的像素里面最亮的作为大气光
注:选中的像素未必是全图最亮的,而且要比选取全图最亮的方式鲁棒性更好。
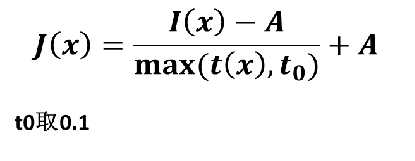
去雾
大致就是这个流程:
1.求图像暗通道
2.利用暗通道计算出折射率
3.利用暗通道估计大气光
4.代回雾图公式去雾
#include<opencv2\core\core.hpp>
#include<opencv2\highgui\highgui.hpp>
#include<opencv2\imgproc\imgproc.hpp>
#include<iostream>
#include<vector>
#include <algorithm>
using namespace cv;
using namespace std;
//求暗通道
Mat darkChannel(Mat src)
{
Mat rgbmin = Mat::zeros(src.rows, src.cols, CV_8UC1);
Mat dark = Mat::zeros(src.rows, src.cols, CV_8UC1);
Vec3b intensity;
for (int m = 0; m<src.rows; m++)
{
for (int n = 0; n<src.cols; n++)
{
intensity = src.at<Vec3b>(m, n);
rgbmin.at<uchar>(m, n) = min(min(intensity.val[0], intensity.val[1]), intensity.val[2]);
}
}
//模板尺寸
int scale = 7;
//cout << "Please enter the mask scale: " << endl;
//cin >> scale;
//边界扩充
int radius = (scale - 1) / 2;
Mat border;
//由于要求最小值,所以扩充的边界可以用复制边界填充
copyMakeBorder(rgbmin, border, radius, radius, radius, radius, BORDER_REPLICATE);
//最小值滤波
for (int i = 0; i < src.cols; i++)
{
for (int j = 0; j < src.rows; j++)
{
//选取兴趣区域
Mat roi;
roi = border(Rect(i, j, scale, scale));
//求兴趣区域的最小值
double minVal = 0; double maxVal = 0;
Point minLoc = 0; Point maxLoc = 0;
minMaxLoc(roi, &minVal, &maxVal, &minLoc, &maxLoc, noArray());
dark.at<uchar>(Point(i, j)) = (uchar)minVal;
}
}
return dark;
}
uchar light(vector<uchar> inputIamgeMax)
{
uchar maxA=0;
for (int i = 0; i < inputIamgeMax.size() - 1; i++)
{
if (maxA < inputIamgeMax[i + 1])
{
maxA = inputIamgeMax[i + 1];
}
}
return maxA;
}
//Mat dark(Mat image)
//{
// Mat minColor(image.rows, image.cols, CV_8UC1, Scalar(180, 120, 50));
// Mat darkChannel(image.rows, image.cols, CV_8UC1, Scalar(180, 120, 50));
//
// //求每个像素BGR三通道最小值
// for (int i = 0; i < image.cols; i++)
// {
// for (int j = 0; j < image.rows; j++)
// {
// uchar blue, green, red;
// blue = image.at<Vec3b>(Point(i, j))[0];
// green = image.at<Vec3b>(Point(i, j))[1];
// red = image.at<Vec3b>(Point(i, j))[2];
// minColor.at<uchar>(Point(i, j)) = minBGR(blue, green, red);
// }
// }
//
// //模板尺寸
// int scale;
// cout << "Please enter the mask scale: " << endl;
// cin >> scale;
//
// //边界扩充
// int radius = (scale - 1) / 2;
// Mat border;
// //由于要求最小值,所以扩充的边界可以用复制边界填充
// copyMakeBorder(minColor, border, radius, radius, radius, radius, BORDER_REPLICATE);
//
// //最小值滤波
// for (int i = 0; i < image.cols; i++)
// {
// for (int j = 0; j < image.rows; j++)
// {
// //选取兴趣区域
// Mat roi;
// roi = border(Rect(i, j, scale, scale));
//
// //求兴趣区域的最小值
// double minVal = 0; double maxVal = 0;
// Point minLoc = 0; Point maxLoc = 0;
// minMaxLoc(roi, &minVal, &maxVal, &minLoc, &maxLoc, noArray());
//
// darkChannel.at<uchar>(Point(i, j)) = (uchar)minVal;
// }
// }
// return darkChannel;
//}
int main(int argc, char* argv[])
{
Mat image = imread("mai4.jpg");
imshow("image",image);
Mat darkChannel1 = darkChannel(image);
imshow("darkChannel1", darkChannel1);
namedWindow("dehazed");
//估计大气光
Mat temp; darkChannel1.copyTo(temp);
vector<Point> darkMaxPoint;
vector<uchar> inputMax;
for (long i = 0; i < ((darkChannel1.rows*darkChannel1.cols) / 1000); i++)
{
double minVal = 0; double maxVal = 0;
Point minLoc = 0; Point maxLoc = 0;
minMaxLoc(temp, &minVal, &maxVal, &minLoc, &maxLoc, noArray());
darkMaxPoint.push_back(maxLoc);
inputMax.push_back(image.at<uchar>(maxLoc));
circle(temp, maxLoc,5, Scalar(0), 1, 8, 0);
temp.at<uchar>(maxLoc) = temp.at<uchar>(minLoc);
}
uchar A = light(inputMax);
double w = 0.65;
//createTrackbar("w1", "dehazed", &w1, 100, NULL);
//求折射率
Mat T = Mat::zeros(image.rows, image.cols, CV_8UC3);
Scalar intensity;
for (int m = 0; m<image.rows; m++)
{
for (int n = 0; n<image.cols; n++)
{
intensity = darkChannel1.at<uchar>(m, n);
T.at<Vec3b>(m, n)[0] = (1 - w * intensity.val[0] / A) * 255;
T.at<Vec3b>(m, n)[1] = (1 - w * intensity.val[0] / A) * 255;
T.at<Vec3b>(m, n)[2] = (1 - w * intensity.val[0] / A) * 255;
}
}
//去雾
Mat J(image.rows, image.cols, CV_8UC3, Scalar(180, 120, 50));
Mat temp1(image.rows, image.cols, CV_8UC3, Scalar(180, 120, 50));
//subtract(image, Scalar(A, A, A), temp1);
temp1 = abs(image - Scalar(A, A, A));
double t0 = 0.1;
Scalar T1;
Vec3b intsrc;
for (int i = 0; i < image.cols; i++)
{
for (int j = 0; j < image.rows; j++)
{
T1 = T.at<uchar>(Point(i, j));
intsrc = image.at<Vec3b>(Point(i, j));
double tmax = (T1.val[0] / 255) < t0 ? t0 : (T1.val[0] / 255);
for (int k = 0; k < 3; k++)
{
J.at<Vec3b>(Point(i, j))[k] = abs((intsrc.val[k] - A) / tmax + A) > 255 ? 255 : abs((intsrc.val[k] - A) / tmax + A);
}
}
}
imshow("dehazed", J);
while (char(waitKey(1)) != 'q') {}
return 0;
}















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









