





下载附件,照例扔入Exeinfo PE查看信息
32位程序,没有加壳(壳是对代码的加密,起混淆保护的作用,一般用来阻止逆向)。
IDA32打开,查看main()函数
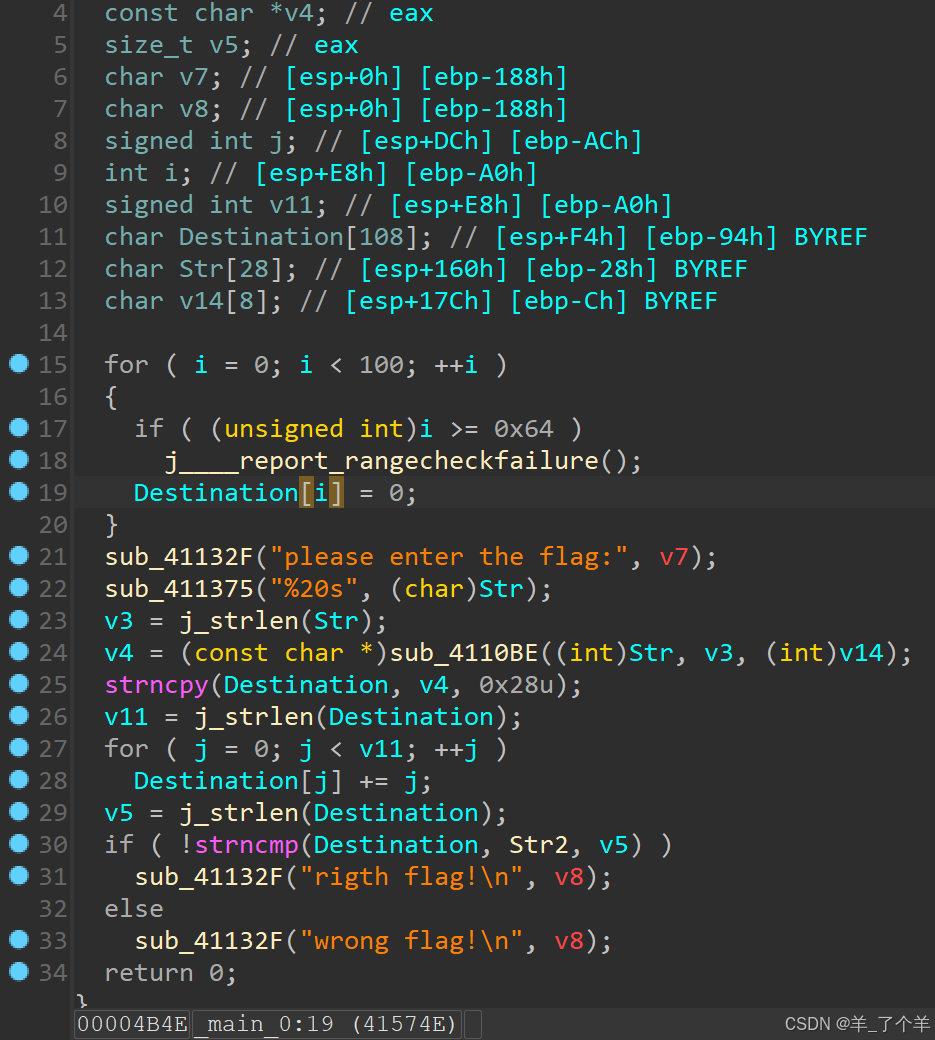
分析代码,注意最后的几行,是一个加密的函数。
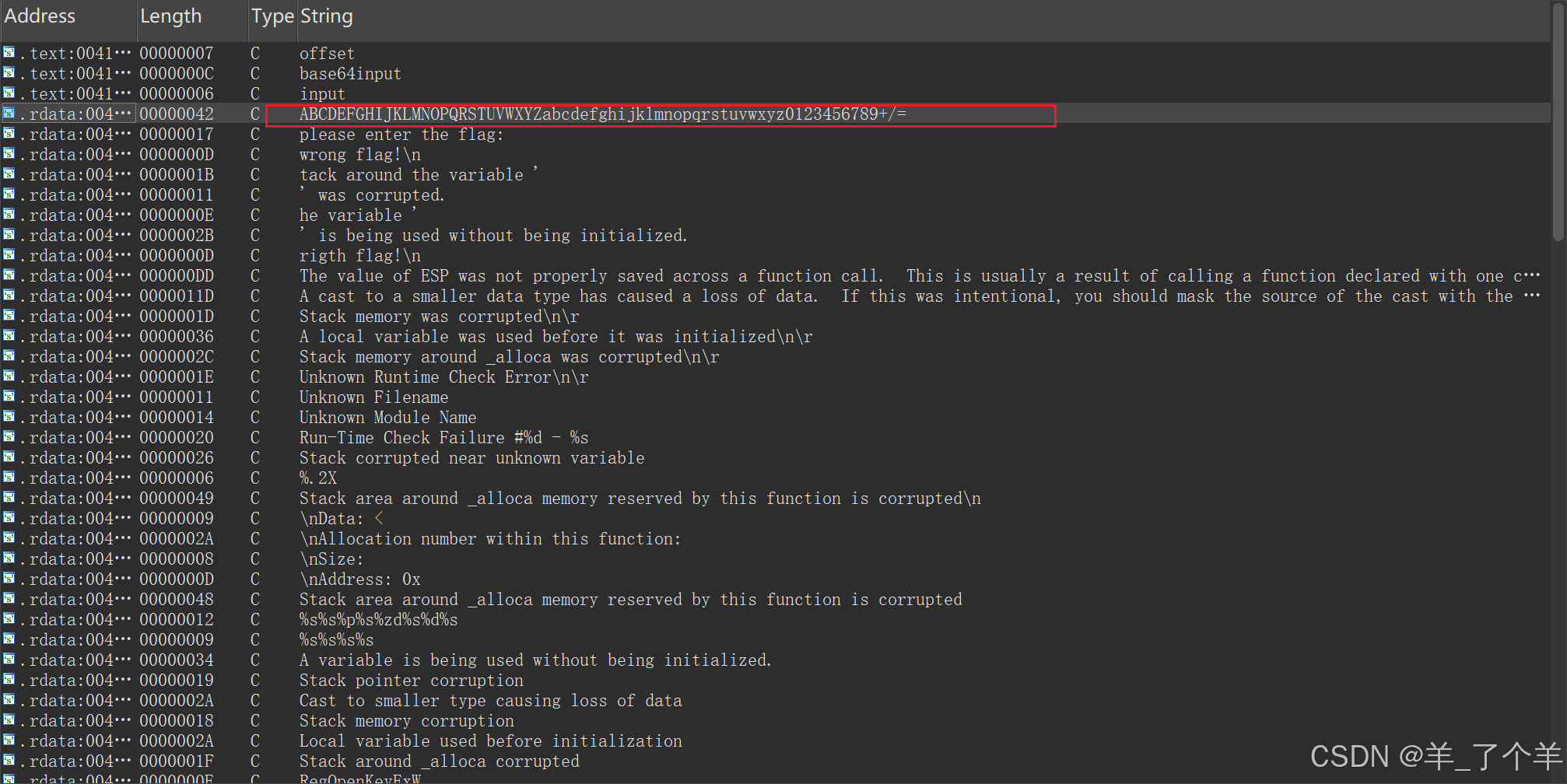
看一下加密字符串里面的字符串的内容,点进去base64加密

查看str2字符串,写一个脚本
exp:
import base64
str = 'e3nifIH9b_C@n@dH'
flag = ''
index = ''
for i in range(0,len(str)):
index = chr(ord(str[i])-i)
flag += index
flag = base64.b64decode(flag)
print(flag)
运行
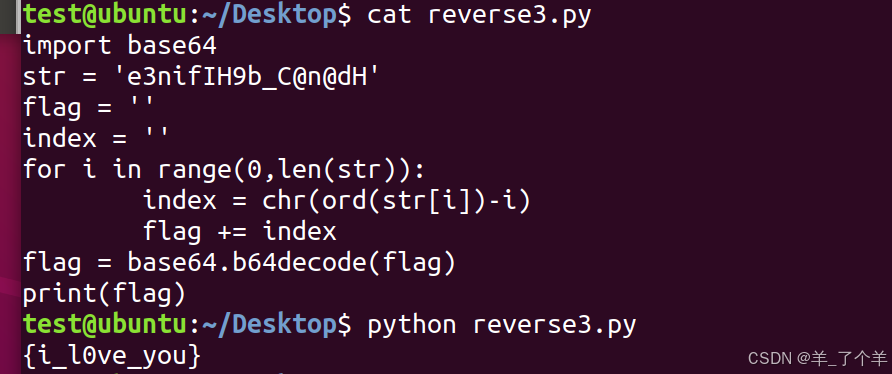
得到flag
flag{i_l0ve_you}

















 835
835

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









