






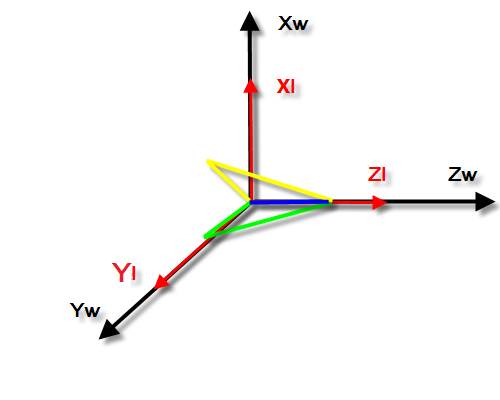
在3维中常用的欧拉角坐标定向系统是用绕三个轴旋转的角度来表示物体的朝向(Rx,Ry,Rz)(注意三个轴是针对物体坐标系的)。如图1,物体处于世界坐标系(Xw,Yw,Zw)原点,此时物体坐标系(Xl,Yl,Zl)和世界坐标系重合(这里我使用右手坐标系。你也可以使用左手坐标系,无所谓,一样)。此时,规定物体的朝向为(0,0,0)。
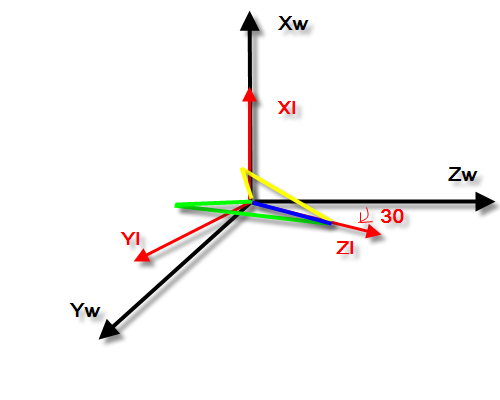
 现在开始旋转物体,先绕物体坐标系x轴(Xl)旋转30度(这里我规定沿着轴向轴的负方向看去,顺时针旋转为正。你也可以自己规定,无所谓,遵守规定即可),注意,此时的物体坐标系已经发生变化,见图2,
现在开始旋转物体,先绕物体坐标系x轴(Xl)旋转30度(这里我规定沿着轴向轴的负方向看去,顺时针旋转为正。你也可以自己规定,无所谓,遵守规定即可),注意,此时的物体坐标系已经发生变化,见图2,
然后再绕Yl轴旋转90度,此时,你会发现Zl轴已经和了世界坐标系X轴共轴。见图3
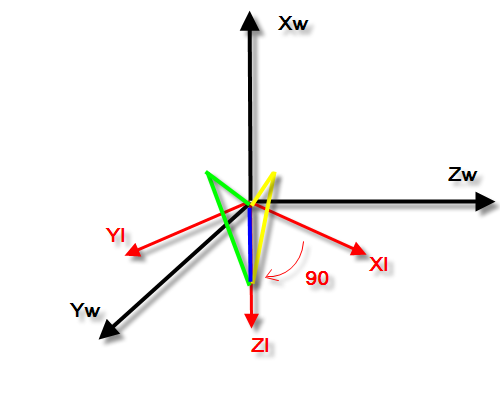
好了,此时使用欧拉角来表示当前物体的方向的话,其坐标应该是(30,90,0),对应旋转顺序是Xl->Yl->Zl。然而,有意思的是如果再继续旋转,现在按照Zl旋转-40度,发现什么了?咦,怎么感觉已经绕过这个轴旋转过一次了,虽然轴向相反?^_^,anyway,最后的坐标应该是(30,90,-40),见图4。
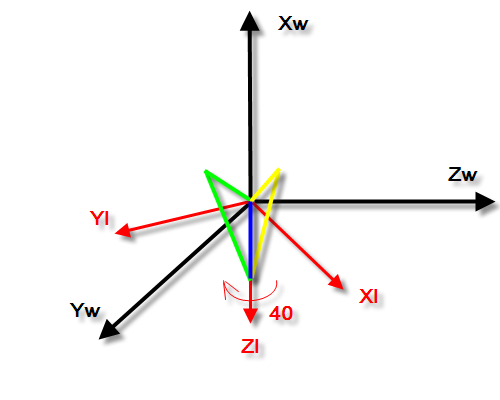
好了,回到刚才的疑惑上,既然感觉两次旋转是绕同一轴,如果我一开始考虑全部绕该轴的旋转呢?即先绕Xl旋转30-(-40)=70度,然后再绕Yl旋转90度。^_^怎么样,已经到达和上次旋转的效果了吧。这说明什么?欧拉角坐标(30,90,-40)和(30-(-40),90,0)等同。甚至坐标(Rx1,90,Rz1)和(Rx2,90,Rz2)相同,只需满足Rx1-Rz1=Rx2-Rz2。当Rx1-Rz1=Rx2时,Rz2==0,即在这种情况下任何再绕Zl轴的旋转,都可以使用先绕Xl轴来做到。或者从另一个角度来说,物体现在本质上只能绕两个轴的旋转!即少了一个旋转自由度!这就是3维中的万向节死锁现象。
概括起来可以这么说,绕着物体坐标系中某一个轴,比如y轴的+(-)90度的某次旋转,使得这次旋转的前一次绕物体坐标系x轴的旋转和这次旋转的后一次绕物体坐标系z轴的旋转的两个旋转轴是一样(一样的意思是指在世界坐标系中,两次旋转轴是共轴的但方向相反),从而造成一个旋转自由度丢失。














 4194
4194











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









