






题意:
有两个人\(Alan\)和\(Bob\),他们现在都在\(A\)点,现在\(Bob\)想去\(B\)点,\(Alan\)想先到\(C\)点再去\(B\)点。
\(Alan\)所走的总路程不能超过\(T_1\),\(Bob\)所走的总路程不能超过\(T_2\)。
求他们从\(A\)出发到第一次分开所能走的最长的公共路程。
分析:
首先特判一种特殊情况:
如果\(Bob\)能陪\(Alan\)走完全程,那么答案是\(min(T1, \, T2)\)。
因此他们一定是在\(Alan\)到达\(C\)之前分开的,否则如果在到达\(C\)之后再分开的话,显然不比一起回家更优。
然后二分答案x,即\(Alan\)和\(Bob\)走距离为x的相同路线后分开。
设分离点为\(P\),那么点\(P\)必须满足一下三个条件:
- \(P\)必须在以\(A\)为圆心半径为\(x\)的圆内,因为他们走的公共距离为\(x\)
- \(P\)必须在以\(B\)为圆心半径为\(T_2-x\)的圆内,为了让\(Bob\)在分开之后能及时返回\(B\)点
- \(P\)必选在以\(C\)为圆心半径为\(T_1-x-BC\)的圆内,因为\(Alan\)在到达\(C\)之后还要径直走回\(B\)点。
所以如果三个圆相交,那么一定存在这样的点\(P\)。
判断三个圆是否相交:
三个圆两两相交是必要条件但不是充分条件。
因为可能会有这种情况:
在两两相交的前提下,如果有一个小圆内含在一个大圆内的话,那么这三个圆也是相交的。
否则,如果三个圆有公共部分,两两圆必然有\(1 \sim 2\)个交点。
如图: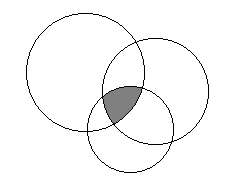
考虑这三个圆的相交区域,它必然是由若干个圆弧组成的。
所以这块区域的关键点也一定是某两个圆的交点,枚举两两圆的共三组交点,如果有一个交点满足都在三个圆的圆内或圆上,那么这三个圆就是相交的。
#include <iostream>
#include <iomanip>
#include <cstdio>
#include <cstring>
#include <algorithm>
#include <cmath>
#include <vector>
using namespace std;
typedef long double LD;
const LD eps = 1e-10;
int dcmp(LD x) {
if(fabs(x) < eps) return 0;
return x < 0 ? -1 : 1;
}
LD sqr(LD x) { return x * x; }
struct Point
{
LD x, y;
Point(LD x = 0, LD y = 0):x(x), y(y) {}
void read() { cin >> x >> y; }
};
Point operator - (const Point& A, const Point& B) {
return Point(A.x - B.x, A.y - B.y);
}
bool operator == (const Point& A, const Point& B) {
return dcmp(A.x - B.x) == 0 && dcmp(A.y - B.x) == 0;
}
LD Dot(const Point& A, const Point& B) {
return A.x * B.x + A.y * B.y;
}
LD Length(const Point& A) { return sqrt(Dot(A, A)); }
LD angle(const Point& A) { return atan2(A.y, A.x); }
struct Circle
{
Point c;
LD r;
Circle() {}
Circle(Point c, LD r):c(c), r(r) {}
Point point(LD a) {
return Point(c.x + cos(a) * r, c.y + sin(a) * r);
}
};
LD t1, t2, T1, T2;
Point p[3];
Circle o[3];
vector<Point> inter;
bool OnCircle(Point p, Circle C) {
return dcmp(Length(p - C.c) - C.r) == 0;
}
bool getCircleIntersection(Circle C1, Circle C2) {
LD &r1 = C1.r, &r2 = C2.r;
LD &x1 = C1.c.x, &x2 = C2.c.x, &y1 = C1.c.y, &y2 = C2.c.y;
LD d = Length(C1.c - C2.c);
if(dcmp(fabs(r1-r2) - d) > 0) return true;
if(dcmp(r1 + r2 - d) < 0) return false;
LD d2 = Dot(C1.c - C2.c, C1.c - C2.c);
LD a = r1*(x1-x2)*2, b = r1*(y1-y2)*2, c = r2*r2-r1*r1-d*d;
LD p = a*a+b*b, q = -a*c*2, r = c*c-b*b;
LD cosa, sina, cosb, sinb;
//One Intersection
if(dcmp(d - (r1 + r2)) == 0 || dcmp(d - fabs(r1 - r2)) == 0) {
cosa = -q / p / 2;
sina = sqrt(1 - sqr(cosa));
Point p(x1 + C1.r * cosa, y1 + C1.r * sina);
if(!OnCircle(p, C2)) p.y = y1 - C1.r * sina;
inter.push_back(p);
return true;
}
//Two Intersections
LD delta = sqrt(q * q - p * r * 4);
cosa = (delta - q) / p / 2;
cosb = (-delta - q) / p / 2;
sina = sqrt(1 - sqr(cosa));
sinb = sqrt(1 - sqr(cosb));
Point p1(x1 + C1.r * cosa, y1 + C1.r * sina);
Point p2(x1 + C1.r * cosb, y1 + C1.r * sinb);
if(!OnCircle(p1, C2)) p1.y = y1 - C1.r * sina;
if(!OnCircle(p2, C2)) p2.y = y1 - C1.r * sinb;
if(p1 == p2) p1.y = y1 - C1.r * sina;
inter.push_back(p1);
inter.push_back(p2);
return true;
}
bool Include(Circle C1, Circle C2) {
LD d = Length(C1.c - C2.c);
if(dcmp(fabs(C1.r-C2.r) - d) > 0) return true;
return false;
}
bool InAllCircle(const Point& t) {
for(int i = 0; i < 3; i++) {
LD d = Length(t - o[i].c);
if(dcmp(d - o[i].r) > 0) return false;
}
return true;
}
bool check() {
inter.clear();
for(int i = 0; i < 3; i++)
for(int j = i + 1; j < 3; j++)
if(!getCircleIntersection(o[i], o[j])) return false;
for(int i = 0; i < 3; i++)
for(int j = i + 1; j < 3; j++)
if(Include(o[i], o[j])) return true;
for(Point t : inter)
if(InAllCircle(t)) return true;
return false;
}
int main()
{
cout << fixed << setprecision(15);
cin >> t1 >> t2;
for(int i = 0; i < 3; i++) p[i].read();
LD AB = Length(p[1] - p[0]);
LD AC = Length(p[2] - p[0]);
LD BC = Length(p[2] - p[1]);
T1 = AC + BC + t1;
T2 = AB + t2;
if(dcmp(T2 - AC - BC) >= 0) {
cout << min(T1, T2) << endl;
return 0;
}
LD L = 0, R = min(T1 - BC, T2);
for(int i = 0; i < 100; i++) {
LD mid = (L + R) / 2.0;
o[0] = Circle(p[0], mid);
o[1] = Circle(p[1], T2 - mid);
o[2] = Circle(p[2], T1 - BC - mid);
if(check()) L = mid;
else R = mid;
}
cout << L << endl;
return 0;
}













 1785
1785











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









