






第25讲 对称矩阵和正定性
Symmetric matrices and positive definiteness
网易公开课open.163.com
进入第三单元学习,主题是正定矩阵及其应用。对称矩阵是最重要的矩阵之一,特征值为实数并且拥有一套正交特征向量。正定矩阵的性质则更好。
- 对称矩阵 Symmetric matrices
对称矩阵
如果A具有n个线性无关的特征向量,可以对角化得到
- 实特征值 Real eigenvalues
矩阵A具有特征值
两侧同乘x,则:
因为矩阵为对称矩阵,则有:
因为
因此得证
对于复矩阵A,若有
对于对称矩阵,
矩阵
当确认矩阵特征值为实数后,下一个要考虑的问题就是它是正还是负数,因为这影响着微分方程中体系的稳定与否。但是对于大型矩阵通过计算
对于对称阵主元与特征值符号相匹配这件事情,通常是用合同矩阵的惯性定理加以证明。若存在可逆矩阵 C 满足A 与 B 为合同矩阵,惯性定理是指矩阵的特征值符号经过合同变换后不发生变化。对称阵 A 经过消元操作可得,就称
,而经过对角化处理得到
,两者比较可知
,因此两个对角阵为合同矩阵,主元和特征值的符号匹配。
G.Strang 在书里给了一个接近同伦理论的证明:对于对称矩阵 可做分解,如,在下三角阵转变
的过程中,矩阵的变化为
,矩阵的特征值也从4,-2 变为1,-8(即原矩阵的主元)。这个过程中如果特征值发生符号变化,则总有一个瞬间特征值穿过0点,那个瞬间矩阵应该是奇异阵,但是相乘的三个矩阵一直是非奇异阵,因此不可能有这样一个时刻存在,所以特征值不会发生符号变化,即和主元符号保持一致。
矩阵A+bI的特征值比矩阵A的特征值大b,可以通过A+bI的主元来了解矩阵A的特征值与b的大小关系,因此利用这个性质可以估计特征值的状态。
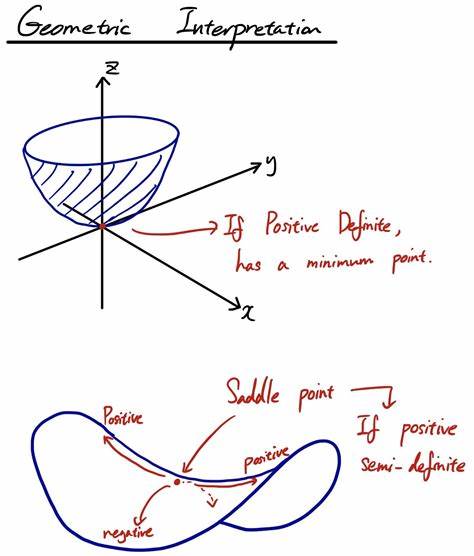
- 正定矩阵 Positive definite matrices
正定矩阵A是特征值都为正数的对称矩阵。它的主元也均为正数。
例如矩阵A=
因为主元和特征值都是正的,可以知道正定矩阵的特征值也是正的。但是反之并不成立。矩阵
若将行列式作为正定的判据,则要求n阶矩阵左上角的所有kxk(1<=k<=n)子行列式(subdeterminant)数值均为正,矩阵确定为正定矩阵。
本讲的内容将之前教授的主元、行列式和特征值的概念结合在了一起,对于正定矩阵这些都是正的,当完全掌握了它们的性质后会推广到非对称矩阵,甚至非方阵。














 9248
9248











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









