






opencv2.1版本之前使用IplImage*数据结构来表示图像,2.1之后的版本使用图像容器Mat来存储。IplImage结构体如下所示。
1 typedef struct _IplImage 2 { 3 int nSize; /* IplImage大小 */ 4 int ID; /* 版本 (=0)*/ 5 int nChannels; /* 大多数OPENCV函数支持1,2,3 或 4 个通道 */ 6 int alphaChannel; /* 被OpenCV忽略 */ 7 int depth; /* 像素的位深度: IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U, 8 IPL_DEPTH_16S, IPL_DEPTH_32S, IPL_DEPTH_32F and IPL_DEPTH_64F 可支持 */ 9 char colorModel[4]; /* 被OpenCV忽略 */ 10 char channelSeq[4]; /* 同上 */ 11 int dataOrder; /* 0 - 交叉存取颜色通道, 1 - 分开的颜色通道. 12 cvCreateImage只能创建交叉存取图像 */ 13 int origin; /* 0 - 顶—左结构, 14 1 - 底—左结构 (Windows bitmaps 风格) */ 15 int align; /* 图像行排列 (4 or 8). OpenCV 忽略它,使用 widthStep 代替 */ 16 int width; /* 图像宽像素数 */ 17 int height; /* 图像高像素数*/ 18 struct _IplROI *roi;/* 图像感兴趣区域. 当该值非空只对该区域进行处理 */ 19 struct _IplImage *maskROI; /* 在 OpenCV中必须置NULL */ 20 void *imageId; /* 同上*/ 21 struct _IplTileInfo *tileInfo; /*同上*/ 22 int imageSize; /* 图像数据大小(在交叉存取格式下imageSize=image->height*image->widthStep),单位字节*/ 23 char *imageData; /* 指向排列的图像数据 */ 24 int widthStep; /* 排列的图像行大小,以字节为单位 */ 25 int BorderMode[4]; /* 边际结束模式, 被OpenCV忽略 */ 26 int BorderConst[4]; /* 同上 */ 27 char *imageDataOrigin; /* 指针指向一个不同的图像数据结构(不是必须排列的),是为了纠正图像内存分配准备的 */ 28 } 29 IplImage;
1、使用指针遍历图像像素
(1)单通道字节型图像像素访问
1 /* 2 @author:CodingMengmeng 3 @theme:Read the image pixel values 4 @time:2017-3-16 11:27:31 5 @blog:http://www.cnblogs.com/codingmengmeng/ 6 */ 7 #include <cv.h> 8 #include <highgui.h> 9 using namespace std; 10 using namespace cv; 11 int main(void) 12 { 13 IplImage* imgSrc = cvLoadImage("./inputData\\shuke1.jpg",0); 14 uchar* pixel = new uchar; 15 for (int i = 0; i < imgSrc->height; i++) 16 { 17 for (int j = 0; j < imgSrc->width; j++) 18 { 19 pixel = (uchar*)(imgSrc->imageData + i*imgSrc->widthStep+j); 20 cout << "pixel=" <<(*pixel)+0<< endl;//+0隐式转换为整型,否则会打印出字符 21 } 22 } 23 delete pixel;
24 return 0; 25 }
输出结果是0-255灰度级的灰度值。
其中(uchar*)(imgSrc->imageData + i*imgSrc->widthStep+j)的具体含义:
(a)imgSrc->imageData指向图像第一行的首地址,i是指当前像素点所在的行,widthStep是指图像每行所占的字节数;所以imgSrc->imageData + i*imgSrc->widthStep表示该像素点所在行的首地址;j表示当前像素点所在列,所以imgSrc->imageData + i*imgSrc->widthStep+j即表示该像素点的地址。而因为IplImage->ImageData 的默认类型是 char 类型,所以再对图像像素值进行操作时,要使用强制类型转换为unsigned char,再对其进行处理。否则,图像像素值中,会有负值出现。
(b)widthStep表示存储一行像素需要的字节数
一个m*n的单通道字节型图像,其imageData排列如下:
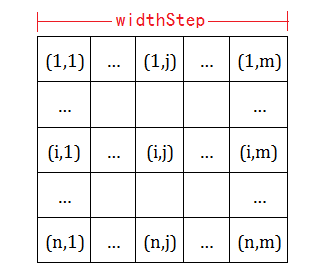
因为opencv分配的内存是按4字节对齐的,所以widthStep必须是4的倍数,如果8U图像宽度为3,那么widthStep是4,加一个字节补齐。这个图像的一行需要4个字节,只使用前3个,最后一个空在那儿不用。也就是一个宽3高3的图像的imageData数据大小为4*3=12字节。
(2)三通道字节型图像像素访问
多通道字节型图像的imageData排列如下:
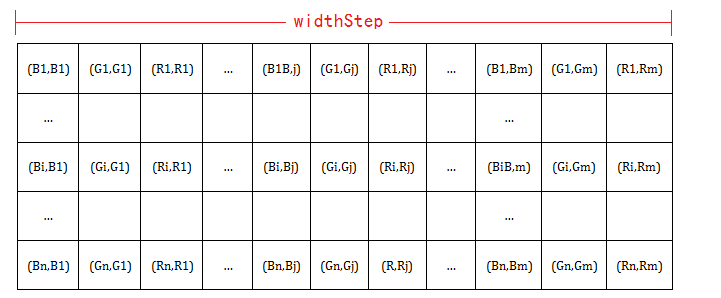
其中(Bi,Bj)(Gi,Gj)(Ri,Rj)表示图像(i,j)处BGR分量的值。
1 /* 2 //@author:CodingMengmeng 3 //@theme:Read the image pixel values 4 //@time:2017-3-16 11:59:17 5 //@blog:http://www.cnblogs.com/codingmengmeng/ 6 */ 7 #include <cv.h> 8 #include <highgui.h> 9 using namespace std; 10 using namespace cv; 11 int main(void) 12 { 13 IplImage* imgSrc = cvLoadImage("./inputData\\shuke1.jpg"); 14 uchar* b_pixel = new uchar; 15 uchar* g_pixel = new uchar; 16 uchar* r_pixel = new uchar; 17 for (int i = 0; i < imgSrc->height; i++) 18 { 19 for (int j = 0; j < imgSrc->width; j++) 20 { 21 b_pixel = (uchar*)(imgSrc->imageData + i*imgSrc->widthStep + (j*imgSrc->nChannels + 0)); 22 g_pixel = (uchar*)(imgSrc->imageData + i*imgSrc->widthStep + (j*imgSrc->nChannels + 1)); 23 r_pixel=(uchar*)(imgSrc->imageData + i*imgSrc->widthStep + (j*imgSrc->nChannels + 2)); 24 cout << "b_pixel=" << *b_pixel+0 << endl; 25 cout << "g_pixel=" << *g_pixel+0 << endl; 26 cout << "r_pixel=" << *r_pixel+0 << endl; 27 cout << "/********************************************/" << endl; 28 } 29 } 30 delete b_pixel; 31 delete g_pixel; 32 delete r_pixel; 33 return 0; 34 }
运行结果:

2、使用cvGet2D()函数访问
cvGet*D系列函数可以用来返回特定位置的数组元素(一般使用cvGet2D),原型如下:
1 CvScalar cvGet1D( const CvArr* arr, int idx0 ); 2 CvScalar cvGet2D( const CvArr* arr, int idx0, int idx1 ); 3 CvScalar cvGet3D( const CvArr* arr, int idx0, int idx1, int idx2 ); 4 CvScalar cvGetND( const CvArr* arr, int* idx );
(1)单通道图像像素访问
1 /* 2 @author:CodingMengmeng 3 @theme:Read the image pixel values 4 @time:2017-3-16 15:12:57 5 @blog:http://www.cnblogs.com/codingmengmeng/ 6 */ 7 #include <cv.h> 8 #include <highgui.h> 9 using namespace std; 10 using namespace cv; 11 int main(void) 12 { 13 IplImage* imgSrc = cvLoadImage("./inputData\\shuke1.jpg",0); 14 CvScalar pixel_v; 15 /* 16 CvScalar是一个可以用来存放4个double数值的数组 17 一般用来存放像素值(不一定是灰度值哦)的,最多可以存放4个通道的 18 如何赋值: 19 a) 存放单通道图像中像素:cvScalar(255); 20 b) 存放三通道图像中像素:cvScalar(255,255,255); 21 c)只使用第一个通道,val[0]=val0;等同于cvScalar(val0,0,0,0); 22 */ 23 for (int i = 0; i < imgSrc->height; i++) 24 { 25 for (int j = 0; j < imgSrc->width; j++) 26 { 27 pixel_v = cvGet2D(imgSrc, i, j); 28 cout << "pixel=" << pixel_v.val[0] << endl; 29 } 30 } 31 return 0; 32 }
注意:
对于图像中的某一像素点 P(x, y), 在我们正常的坐标系中,x代表其横坐标,y代表其纵坐标;而在opencv的函数cvGet2D()的函数原型是 : CvScalar cvGet2D (const CvArr * arr, int idx0, int idx1); 函数返回的是一个CvScalar 容器,其参数中也有两个方向的坐标,但跟我们平常习惯的坐标不一样的是,idx0代表是的行,即高度,对应于我们平常坐标系的y, idx1代表的是列,即宽度,对应于我们平常坐标系的x使用时请千万别弄反,否则容易出现溢出引发异常。
(2)多通道字节型/浮点型图像像素访问
1 /* 2 @author:CodingMengmeng 3 @theme:Read the image pixel values 4 @time:2017-3-16 15:18:29 5 @blog:http://www.cnblogs.com/codingmengmeng/ 6 */ 7 #include <cv.h> 8 #include <highgui.h> 9 using namespace std; 10 using namespace cv; 11 int main(void) 12 { 13 IplImage* imgSrc = cvLoadImage("./inputData\\shuke1.jpg"); 14 CvScalar pixel_v; 15 /* 16 CvScalar是一个可以用来存放4个double数值的数组 17 一般用来存放像素值(不一定是灰度值哦)的,最多可以存放4个通道的 18 如何赋值: 19 a) 存放单通道图像中像素:cvScalar(255); 20 b) 存放三通道图像中像素:cvScalar(255,255,255); 21 c)只使用第一个通道,val[0]=val0;等同于cvScalar(val0,0,0,0); 22 */ 23 for (int i = 0; i < imgSrc->height; i++) 24 { 25 for (int j = 0; j < imgSrc->width; j++) 26 { 27 pixel_v = cvGet2D(imgSrc, i, j); 28 cout << "b_pixel=" << pixel_v.val[0] << endl;//B分量 29 cout << "g_pixel=" << pixel_v.val[1] << endl;//G分量 30 cout << "r_pixel=" << pixel_v.val[2] << endl;//R分量 31 cout << "/********************************************/" << endl; 32 } 33 } 34 return 0; 35 }
运行结果:















 629
629











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









