







前言
大家好,时隔多年之后,我又开始了博客旅程。经历了很多事情之后呢,我发现自己的想法真的很简单:好好读书做课题,闲下来时写写博客,服务大家。所以我会继续写SLAM相关的博客。如果你觉得它对你有帮助,那是最好不过的啦!写作过程中得到了许多热心读者的帮助与鼓励,有些读者还成了要好的朋友,在此向大家致谢啦!关于SLAM,读者也会有很多问题。由于我个人精力和学力都有限,无法一一回答,向大家说声抱歉!有些共同的问题,我肯定会在博客里介绍的!
前两天刚从珠海开会回来,与中山大学的同学们聚在一起玩耍,很开心!

《一起做》系列已经结束,事实上它是我以前探索过程中的一些总结。虽然仍然有很多令人不满意的地方,不过相信读了那个系列,读者应该对SLAM的流程有一定的了解了。尤其是通过代码,你能知道许多论文里没讲清楚的细节。在这之后,我现在有两个规划。一是对目前流行的SLAM程序做一个介绍,沿着《视觉SLAM实战》往下写;二是介绍一些好用的开源工具/库,写成一个《SLAM拾萃》。我觉得这两部分内容,对读者了解SLAM会有较大的帮助。当然,如果你对我的博客有任何建议,可以在下方评论或给我发邮件。
本篇是《SLAM拾萃》第一篇,介绍一个建图工具:octomap。和往常一样,我会介绍它的原理、安装与使用方式,并提供例程供读者学习。必要时也会请小萝卜过来吐槽。(小萝卜真是太好用了,它可以代替读者提很多问题。)
什么是octomap?
RGBD SLAM的目的有两个:估计机器人的轨迹,并建立正确的地图。地图有很多种表达方式,比如特征点地图、网格地图、拓扑地图等等。在《一起做》系列中,我们使用的地图形式主要是点云地图。在程序中,我们根据优化后的位姿,拼接点云,最后构成地图。这种做法很简单,但有一些明显的缺陷:
- 地图形式不紧凑。
点云地图通常规模很大,所以一个pcd文件也会很大。一张640$\times$480的图像,会产生30万个空间点,需要大量的存储空间。即使经过一些滤波之后,pcd文件也是很大的。而且讨厌之处在于,它的“大”并不是必需的。点云地图提供了很多不必要的细节。对于地毯上的褶皱、阴暗处的影子,我们并不特别关心这些东西。把它们放在地图里是浪费空间。 - 处理重叠的方式不够好。
在构建点云时,我们直接按照估计位姿拼在了一起。在位姿存在误差时,会导致地图出现明显的重叠。例如一个电脑屏变成了两个,原本方的边界变成了多边形。对重叠地区的处理方式应该更好一些。 - 难以用于导航
说起地图的用处,第一就是导航啦!有了地图,就可以指挥机器人从A点到B点运动,岂不是很方便的事?但是,给你一张点云地图,是否有些傻眼了呢?我至少得知道哪些地方可通过,哪些地方不可通过,才能完成导航呀!光有点是不够的!
octomap就是为此而设计的!亲,你没有看错,它可以优雅地压缩、更新地图,并且分辨率可调!它以八叉树(octotree,后面会讲)的形式存储地图,相比点云,能够省下大把的空间。octomap建立的地图大概是这样子的:(从左到右是不同的分辨率)
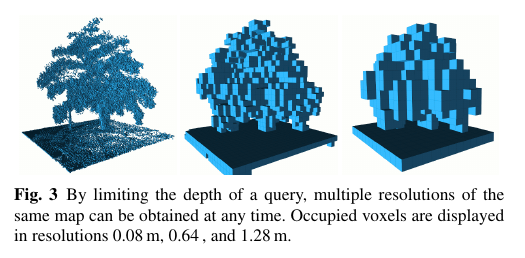
由于八叉树的原因,它的地图像是很多个小方块组成的(很像minecraft)。当分辨率较高时,方块很小;分辨率较低时,方块很大。每个方块表示该格被占据的概率。因此你可以查询某个方块或点“是否可以通过”,从而实现不同层次的导航。简而言之,环境较大时采用较低分辨率,而较精细的导航可采用较高分辨率。
小萝卜:师兄你这是介绍吗?真像广告啊……
octomap原理
本段会讲一些数学知识。如果你想“跑跑程序看效果”,可以跳过本段。
- 八叉树的表达
八叉树,也就是传说中有八个子节点的树!是不是很厉害呢?至于为什么要分成八个子节点,想象一下一个正方形的方块的三个面各切一刀,不就变成八块了嘛!如果你想象不出来,请看下图:
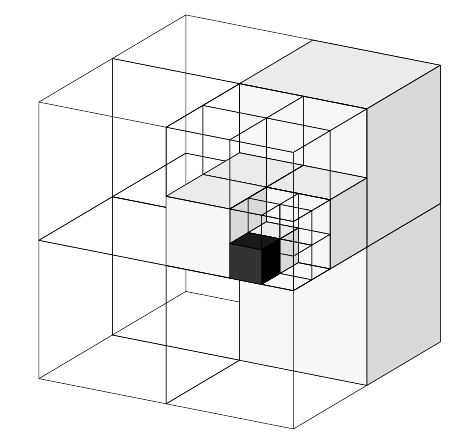
实际的数据结构呢,就是一个树根不断地往下扩,每次分成八个枝,直到叶子为止。叶子节点代表了分辨率最高的情况。例如分辨率设成0.01m,那么每个叶子就是一个1cm见方的小方块了呢!
每个小方块都有一个数描述它是否被占据。在最简单的情况下,可以用0-1两个数表示(太简单了所以没什么用)。通常还是用0~1之间的浮点数表示它被占据的概率。0.5表示未确定,越大则表示被占据的可能性越高,反之亦然。由于它是八叉树,那么一个节点的八个孩子都有一定的概率被占据或不被占据啦!(下图是一棵八叉树)
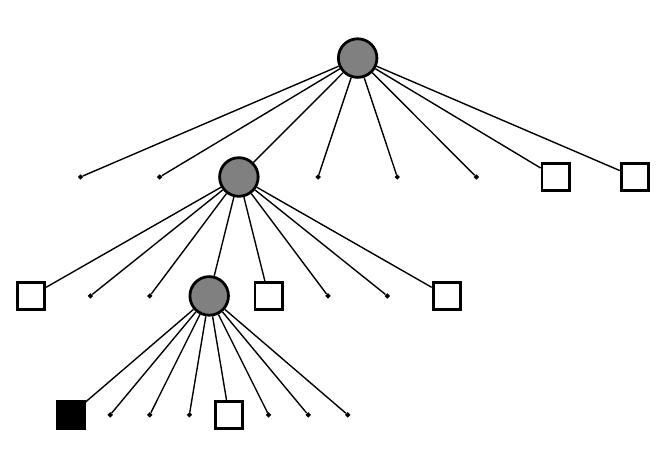
用树结构的好处时:当某个节点的子结点都“占据”或“不占据”或“未确定”时,就可以把它给剪掉!换句话说,如果没必要进一步描述更精细的结构(孩子节点)时,我们只要一个粗方块(父节点)的信息就够了。这可以省去很多的存储空间。因为我们不用存一个“全八叉树”呀!
2. 八叉树的更新
在八叉树中,我们用概率来表达一个叶子是否被占据。为什么不直接用0-1表达呢?因为在对环境的观测过程中,由于噪声的存在,某个方块有时可能被观测到是“占据”的,过了一会儿,在另一些方块中又是“不占据”的。有时“占据”的时候多,有时“不占据”的时候多。这一方面可能是由于环境本身有动态特征(例如桌子被挪走了),另一方面(多数时候)可能是由于噪声。根据八叉树的推导,假设$t=1,\ldots, T$时刻,观测的数据为$z_1, \ldots, z_T$,那么第$n$个叶子节点记录的信息为:$$P(n|z_{1:T}) = \left[ 1+ \frac{1-P(n|z_T)}{P(n|z_T)} \frac{1-P(n|z_{1:T-1})}{P(n|z_{1:T-1})} \frac{P(n)}{1-P(n)} \right]^{-1} \quad \quad (1)$$
小萝卜:哇!又一个好长的式子!这说的是啥师兄?
师兄:哎,写论文非得把一些简单的事情写得很复杂。为了解释这东西,先讲一下 logit 变换。该变换把一个概率$p$变换到全实数空间$R$上: $$ \alpha = logit(p) = log \left( \frac{p}{1-p} \right) $$
这是一个可逆变换,反之有: $$ p = logit^{-1} (\alpha) = \frac{1} { 1+ exp(-\alpha) }. $$
$\alpha$叫做log-odds。我们把用$L()$叶子节点的log-odds,那么(1)就可以写成: $$ L( n| z_{1:T} ) = L(n|z_{1:T-1}) + L(n|z_T) $$
小萝卜:哦!这个我就懂了!每新来一个就直接加到原来的上面,是吧?
师兄:对,此外还要加一个最大最小值的限制。最后转换回原来的概率即可。
八叉树中的父亲节点占据概率,可以根据孩子节点的数值进行计算。比较简单的是取平均值或最大值。如果把八叉树按照占据概率进行渲染,不确定的方块渲染成透明的,确定占据的渲染成不透明的,就能看到我们平时见到的那种东西啦!
octomap本身的数学原理还是简单的。不过它的可视化做的比较好。下面我们来讲讲如何下载、安装八叉树程序,并给出几个小的例程。
安装octomap
octomap的网页见:https://octomap.github.io
它的github源码在:https://github.com/OctoMap/octomap
它还有ROS下的安装方式:http://wiki.ros.org/octomap
在开发过程中,可能需要不断地查看它的API文档。你可以自己用doxygen生成一个,或者查看在线文档:http://octomap.github.io/octomap/doc/
为了保持简洁,我们不要求读者安装ROS,仅介绍单独的octomap。我的编译环境是ubuntu 14.04。ubuntu系列的应该都不会有太大问题。
1. 编译octomap
新建一个目录,拷贝octomap代码。如果没有git请安装git:sudo apt-get install git
-
git clone https://github.com/OctoMap/octomap
git会把代码拷贝到当前目录/octomap下。进入该目录,参照README.md进行安装。编译方式和普通的cmake程序一样,如果你学过《一起做》就应该很熟悉了:
1 mkdir build 2 cd build 3 cmake .. 4 make
事实上,octomap的代码主要含两个模块:本身的octomap和可视化工具octovis。octovis依赖于qt4和qglviewer,所以如果你没有装这两个依赖,请安装它们:sudo apt-get install libqt4-dev qt4-qmake libqglviewer-dev
如果编译没有给出任何警告,恭喜你编译成功!
- 使用octovis查看示例地图
在bin/文件夹中,存放着编译出来可执行文件。为了直观起见,我们直接看一个示例地图:
bin/octovis octomap/share/data/geb079.bt
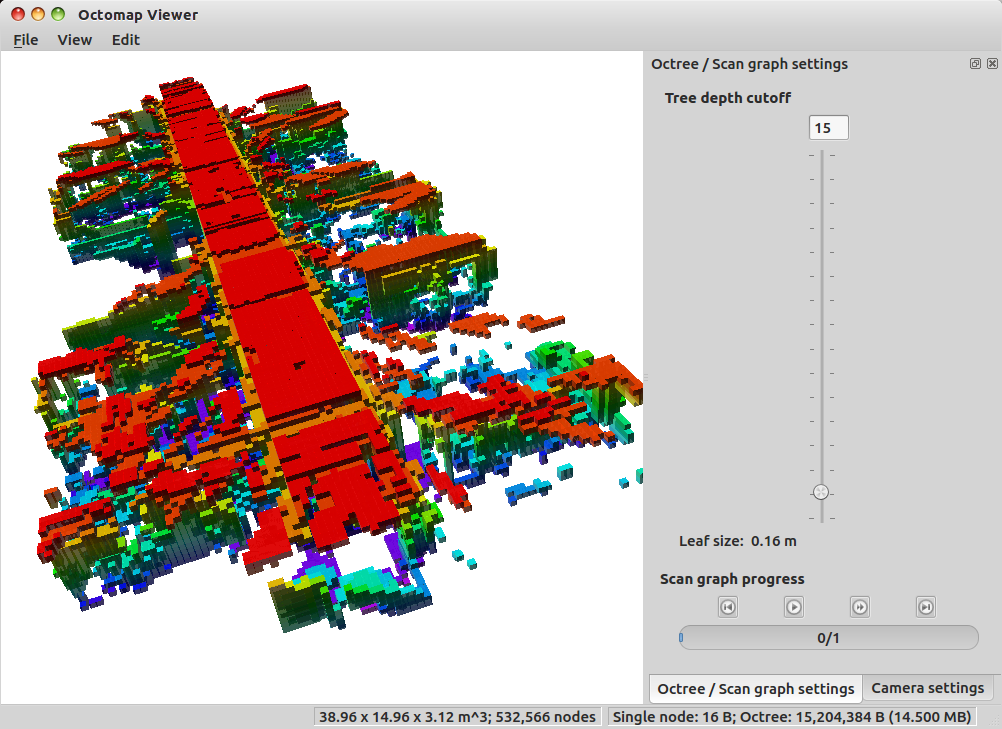
octovis会打开这个地图并显示。它的UI是长这样的。你可以玩玩菜单里各种东西(虽然也不多,我就不一一介绍UI怎么玩了),能看出这是一层楼的扫描图。octovis是一个比较实用的工具,你生成的各种octomap地图都可以用它来看。(所以你可以把octovis放到/usr/local/bin/下,省得以后还要找。)
例程1:转换pcd到octomap
GUI玩够了吧?仅仅会用UI是不够滴,现在让我们开始编代码使用octomap这个库吧!
我为你准备了三个小例程。在前两个中,我会教你如何将一个pcd格式的点云地图转换为octomap地图。后一个中,我会讲讲如何根据g2o优化的轨迹,以类似slam的方式,把几个RGBD图像拼接出一个octomap。这对你研究SLAM会有一些帮助。所有的代码与数据都可以在我的github上找到。有关编译的信息,我写在这个代码的Readme中了,请在编译前看一眼如何编译这些代码。
源代码如下:src/pcd2octomap.cpp 这份代码将命令行参数1作为输入文件,参数2作为输出文件,把输入的pcd格式点云转换成octomap格式的点云。通过这个例子,你可以学会如何创建一个简单的OcTree对象并往里面添加新的点。
1 #include <iostream> 2 #include <assert.h> 3 4 //pcl 5 #include <
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 458
458











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









