






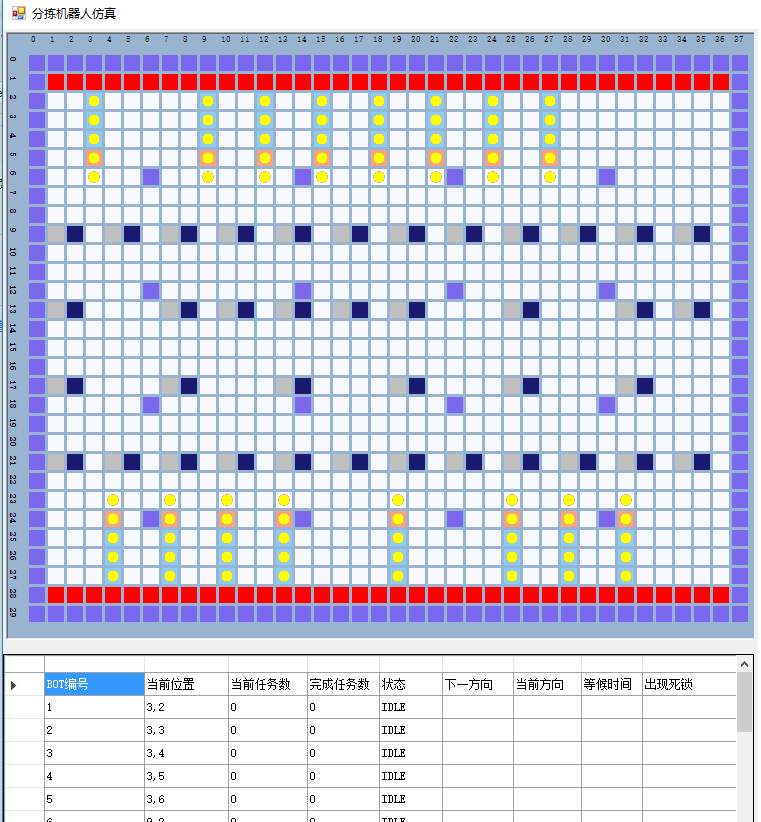
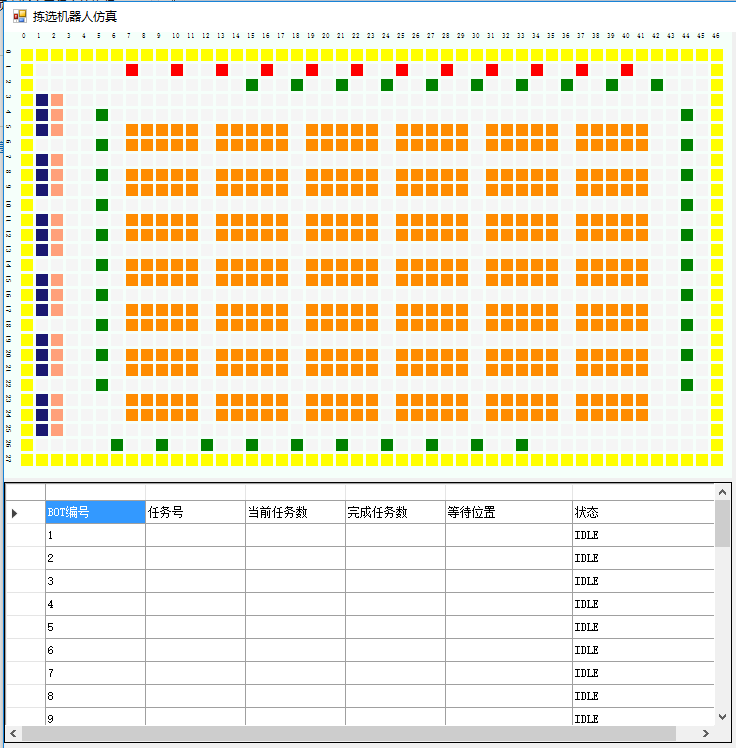
参考亚马逊Kiva的原理,分别做了分拣和拣选两种机器人的仿真:
分拣:40台分拣机器人,拣选40台机器人。
模拟速度分为 空载、带载、转弯、直线、翻盖、升举重,参数参考Kiva;
采用了大致一下技术:
1、 路径规划:基于一定路线规则和大数据统计的的动态A*算法;
2、 任务分配:基于统计的负载动态均衡算法;
3、 解锁算法:基于任务状态和死锁模态的实时监测算法+动态A*算法,解决死锁问题;
4、 动画采用采用C#+GDI;
5、 任务调度与动画仿真界面分开设计,无耦合,任务为随机任务;
6、 地图数据独立存储,与功能分离;
正在完善的功能:
1、 机器人作为独立线程,模拟将更加真实;
2、 机器人与RCS之间采用Socket通讯方式联系;
3、 定义与WMS系统的接口与按需增加部分WMS功能;
参考文献:
主要参考了KIVA相关的视频与论文以及国内外200+论文;
链接:
1-拣选:http://v.youku.com/v_show/id_XMzA3MjY2OTM2OA==.html?spm=a2hzp.8244740.0.0
2-分拣:http://v.youku.com/v_show/id_XMzA3MjY3MjY4NA==.html?spm=a2h0k.8191407.0.0&from=s1.8-1-1.2
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









