







1. LIS3DH管脚定义

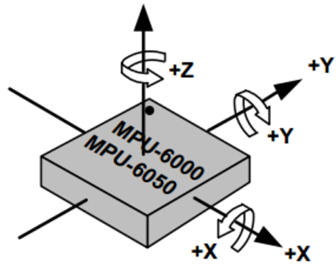
PS:LIS3DH和mpu6050的X和Y方向是相反的, mpu6050如下图所示:
2.LIS3DH加速度计介绍
由于LIS3DH只可以得到XYZ加速度,无法获取角速度,所以LIS3DH是无法测出偏航角(yaw).
3. LIS3DH之转换欧拉角介绍
3.1偏航角(yaw)
如下图所示,偏航角是指机头在水平面上的投影与地轴之间的夹角,以机头右偏为正.范围为[-180,180]

PS:由于LIS3DH无法测出,跳过.
3.2俯仰角(pitch)
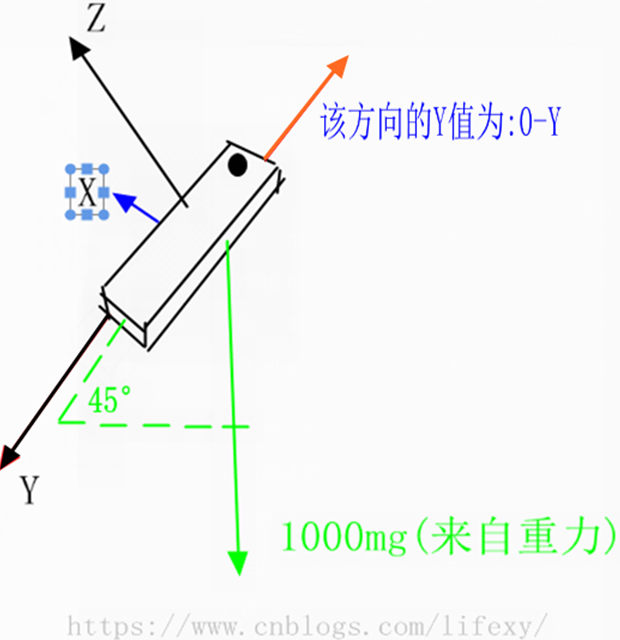
如下图所示, 俯仰角是指机头与水平面的夹角,当飞机平行时则为0,抬头时则为正,范围为[-180,180]
以45°为例,来解析LIS3DH
如下图所示:
转换为角度图为:
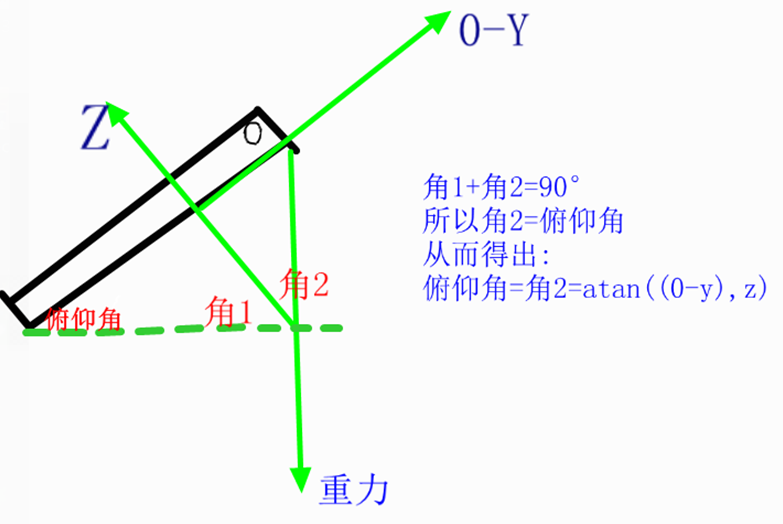
所以转换为角度为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









