







/*------------------------------------------------------------------------------------------*\
This file contains material supporting chapter 7 of the cookbook:
Computer Vision Programming using the OpenCV Library.
by Robert Laganiere, Packt Publishing, 2011.
This program is free software; permission is hereby granted to use, copy, modify,
and distribute this source code, or portions thereof, for any purpose, without fee,
subject to the restriction that the copyright notice may not be removed
or altered from any source or altered source distribution.
The software is released on an as-is basis and without any warranties of any kind.
In particular, the software is not guaranteed to be fault-tolerant or free from failure.
The author disclaims all warranties with regard to this software, any use,
and any consequent failure, is purely the responsibility of the user.
Copyright (C) 2010-2011 Robert Laganiere, www.laganiere.name
\*------------------------------------------------------------------------------------------*/
#if !defined LINEF
#define LINEF
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#define PI 3.1415926
class LineFinder {
private:
// original image
cv::Mat img;
// vector containing the end points
// of the detected lines
std::vector<cv::Vec4i> lines;
// accumulator resolution parameters
double deltaRho;
double deltaTheta;
// minimum number of votes that a line
// must receive before being considered
int minVote;
// min length for a line
double minLength;
// max allowed gap along the line
double maxGap;
public:
// Default accumulator resolution is 1 pixel by 1 degree
// no gap, no mimimum length
LineFinder() : deltaRho(1), deltaTheta(PI/180), minVote(10), minLength(0.), maxGap(0.) {}
// Set the resolution of the accumulator
void setAccResolution(double dRho, double dTheta)
{
deltaRho= dRho;
deltaTheta= dTheta;
}
// Set the minimum number of votes
void setMinVote(int minv)
{
minVote= minv;
}
// Set line length and gap
void setLineLengthAndGap(double length, double gap)
{
minLength= length;
maxGap= gap;
}
// Apply probabilistic Hough Transform
std::vector<cv::Vec4i> findLines(cv::Mat& binary)
{
lines.clear();
cv::HoughLinesP(binary,lines,deltaRho,deltaTheta,minVote, minLength, maxGap);
return lines;
}
// Draw the detected lines on an image
void drawDetectedLines(cv::Mat &image, cv::Scalar color=cv::Scalar(255,255,255))
{
// Draw the lines
std::vector<cv::Vec4i>::const_iterator it2= lines.begin();
while (it2!=lines.end()) {
cv::Point pt1((*it2)[0],(*it2)[1]);
cv::Point pt2((*it2)[2],(*it2)[3]);
cv::line( image, pt1, pt2, color);
++it2;
}
}
// Eliminates lines that do not have an orientation equals to
// the ones specified in the input matrix of orientations
// At least the given percentage of pixels on the line must
// be within plus or minus delta of the corresponding orientation
std::vector<cv::Vec4i> removeLinesOfInconsistentOrientations(
const cv::Mat &orientations, double percentage, double delta)
{
std::vector<cv::Vec4i>::iterator it= lines.begin();
// check all lines
while (it!=lines.end()) {
// end points
int x1= (*it)[0];
int y1= (*it)[1];
int x2= (*it)[2];
int y2= (*it)[3];
// line orientation + 90o to get the parallel line
double ori1= atan2(static_cast<double>(y1-y2),static_cast<double>(x1-x2))+PI/2;
if (ori1>PI) ori1= ori1-2*PI;
double ori2= atan2(static_cast<double>(y2-y1),static_cast<double>(x2-x1))+PI/2;
if (ori2>PI) ori2= ori2-2*PI;
// for all points on the line
cv::LineIterator lit(orientations,cv::Point(x1,y1),cv::Point(x2,y2));
int i,count=0;
for(i = 0, count=0; i < lit.count; i++, ++lit) {
float ori= *(reinterpret_cast<float *>(*lit));
// is line orientation similar to gradient orientation ?
if (std::min(fabs(ori-ori1),fabs(ori-ori2))<delta)
count++;
}
double consistency= count/static_cast<double>(i);
// set to zero lines of inconsistent orientation
if (consistency < percentage) {
(*it)[0]=(*it)[1]=(*it)[2]=(*it)[3]=0;
}
++it;
}
return lines;
}
};
#endif
// HoughLines.cpp : 定义控制台应用程序的入口点。
//
// findContours.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
/*------------------------------------------------------------------------------------------*\
This file contains material supporting chapter 7 of the cookbook:
Computer Vision Programming using the OpenCV Library.
by Robert Laganiere, Packt Publishing, 2011.
This program is free software; permission is hereby granted to use, copy, modify,
and distribute this source code, or portions thereof, for any purpose, without fee,
subject to the restriction that the copyright notice may not be removed
or altered from any source or altered source distribution.
The software is released on an as-is basis and without any warranties of any kind.
In particular, the software is not guaranteed to be fault-tolerant or free from failure.
The author disclaims all warranties with regard to this software, any use,
and any consequent failure, is purely the responsibility of the user.
Copyright (C) 2010-2011 Robert Laganiere, www.laganiere.name
\*------------------------------------------------------------------------------------------*/
#include <iostream>
#include <vector>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include "HoughLines.h"
#pragma comment(lib,"opencv_core2410d.lib")
#pragma comment(lib,"opencv_highgui2410d.lib")
#pragma comment(lib,"opencv_imgproc2410d.lib")
#define PI 3.1415926
int main()
{
// Read input image
cv::Mat image= cv::imread("road.jpg",0);
if (!image.data)
return 0;
// Display the image
cv::namedWindow("Original Image");
cv::imshow("Original Image",image);
// Apply Canny algorithm
cv::Mat contours;
cv::Canny(image,contours,125,350);
cv::Mat contoursInv;
cv::threshold(contours,contoursInv,128,255,cv::THRESH_BINARY_INV);
// Display the image of contours
cv::namedWindow("Canny Contours");
cv::imshow("Canny Contours",contoursInv);
// Hough tranform for line detection
std::vector<cv::Vec2f> lines;
cv::HoughLines(contours,lines,1,PI/180,60);
// Draw the lines
cv::Mat result(contours.rows,contours.cols,CV_8U,cv::Scalar(255));
image.copyTo(result);
std::cout << "Lines detected: " << lines.size() << std::endl;
std::vector<cv::Vec2f>::const_iterator it= lines.begin();
while (it!=lines.end())
{
float rho= (*it)[0]; // first element is distance rho
float theta= (*it)[1]; // second element is angle theta
if (theta < PI/4. || theta > 3.*PI/4.) { // ~vertical line
// point of intersection of the line with first row
cv::Point pt1(rho/cos(theta),0);
// point of intersection of the line with last row
cv::Point pt2((rho-result.rows*sin(theta))/cos(theta),result.rows);
// draw a white line
cv::line( result, pt1, pt2, cv::Scalar(255), 1);
} else { // ~horizontal line
// point of intersection of the line with first column
cv::Point pt1(0,rho/sin(theta));
// point of intersection of the line with last column
cv::Point pt2(result.cols,(rho-result.cols*cos(theta))/sin(theta));
// draw a white line
cv::line( result, pt1, pt2, cv::Scalar(255), 1);
}
std::cout << "line: (" << rho << "," << theta << ")\n";
++it;
}
// Display the detected line image
cv::namedWindow("Detected Lines with Hough");
cv::imshow("Detected Lines with Hough",result);
// Create LineFinder instance
LineFinder ld;
// Set probabilistic Hough parameters
ld.setLineLengthAndGap(100,20);
ld.setMinVote(80);
// Detect lines
std::vector<cv::Vec4i> li= ld.findLines(contours);
ld.drawDetectedLines(image);
cv::namedWindow("Detected Lines with HoughP");
cv::imshow("Detected Lines with HoughP",image);
cv::waitKey();
return 0;
}
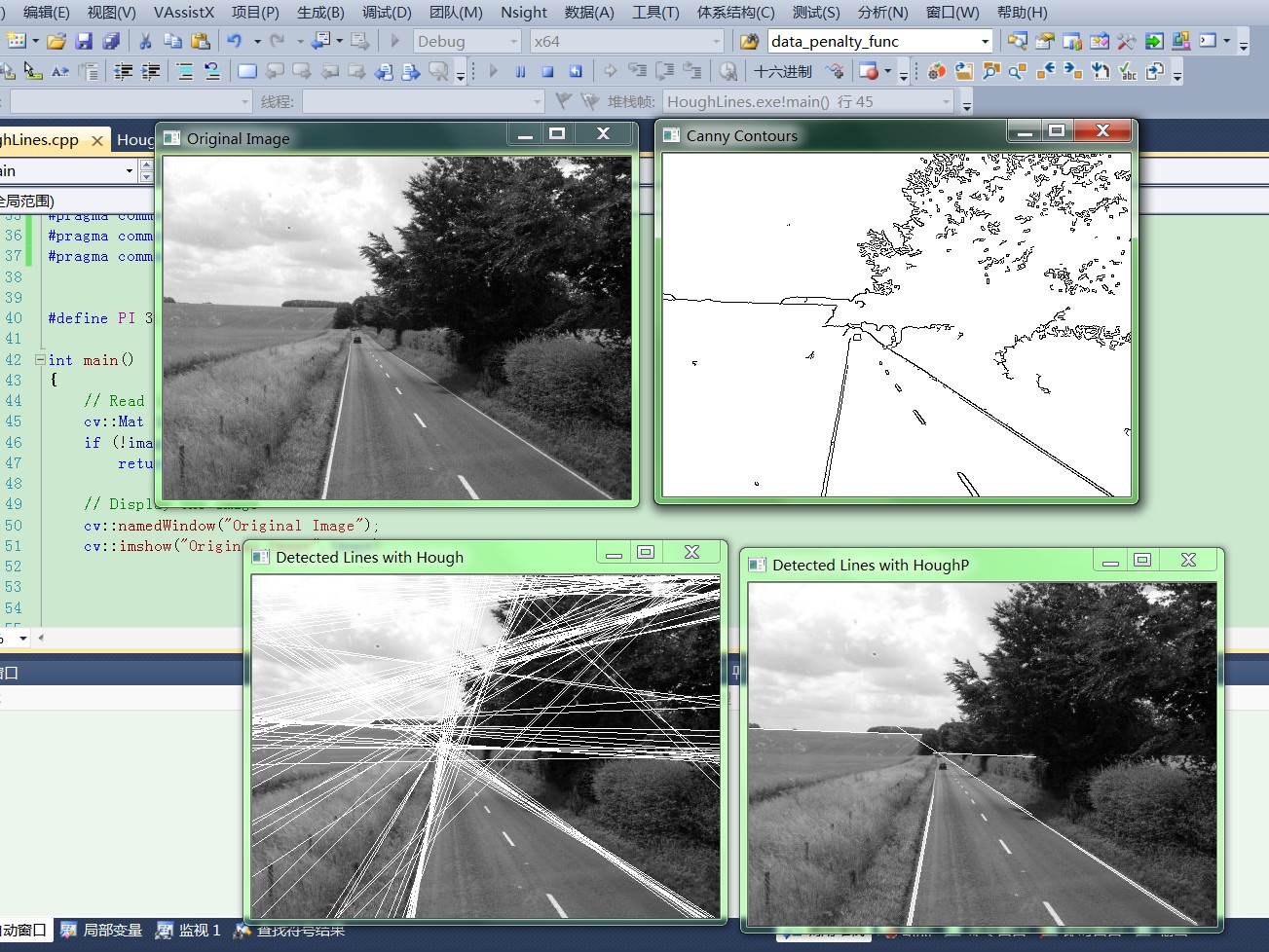
实现效果:














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









