






method1: BaoXing
ref: Curb-Intersection Feature Based Monte Carlo Localization on Urban Roads
- segmentation of laser scan
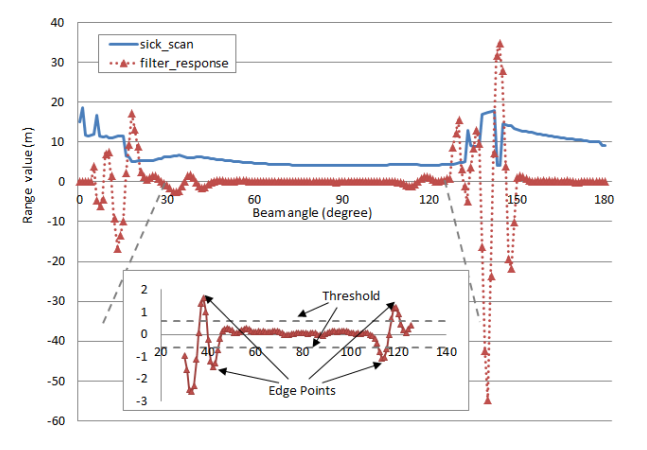
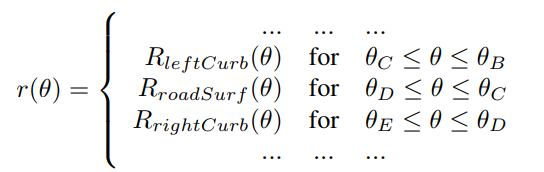
- piecewise function of laserscan
- use second-order differential filter to get local minimum-maximum detection point
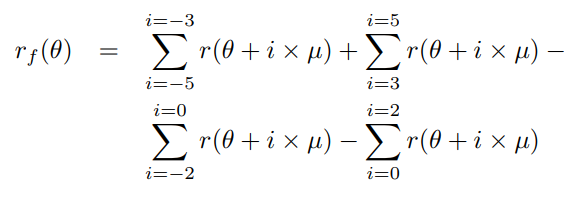
we can think this as, after discussion woth Peng, we believe it's one-order differential function(the same in the picture, red curve):

- classification of the scan
- Road surface segment, shown as line CD, is selected first. It always locates between two edgepoints nearest to center of the sensor.
- Curb lines, (BC and DE), are searchedsubsequently, based on point C and D determined fromthe former step.
- Rest segments are other features off the road.
- monte-carlo localization with these features
- prediction with odom(easy part)
- correction with two kind of features
- curb point
- intersection point
- resampling
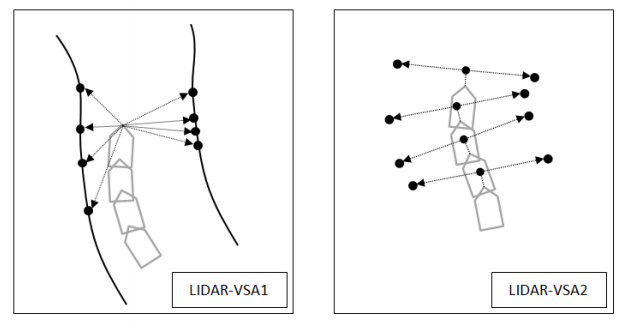
- curb-intersection measurement model
- LIDAR-VSA1
accumulate these curb point, and translate them to last coordinate - LIDAR-VSA2
it's just two parallel point, tagent to CD.And whenever at intersection, we get two these points














 1342
1342











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









