







光学成像系统的模型及MATLAB仿真
本文将给出相干成像系统、非相干成像系统模型,以及像差对成像系统影响的模型,模型和相关概念主要参考goodman的《傅里叶光学》。
一、相干成像系统
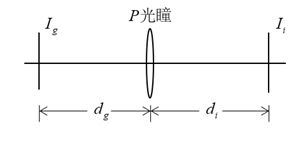
相干成像系统对于振幅来说是线性空间不变系统,存在关系:

其中h(x,y)为点扩展函数,放大倍数M=-di/dg,点扩展函数表达式为:

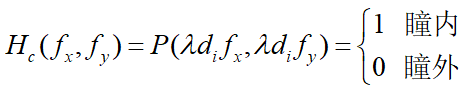
对应的相干光学传递函数(CTF)为:

一般不考虑比例尺,以及光瞳一般为中心对称,所以将CTF表示为:

二、非相干成像系统
光学成像系统的模型及MATLAB仿真
本文将给出相干成像系统、非相干成像系统模型,以及像差对成像系统影响的模型,模型和相关概念主要参考goodman的《傅里叶光学》。
一、相干成像系统
相干成像系统对于振幅来说是线性空间不变系统,存在关系:
其中h(x,y)为点扩展函数,放大倍数M=-di/dg,点扩展函数表达式为:
对应的相干光学传递函数(CTF)为:
一般不考虑比例尺,以及光瞳一般为中心对称,所以将CTF表示为:
二、非相干成像系统
 6223
6223











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















