






列主元Gauss消去法(C++)
目的:编写解n阶线性方程组AX=b的列主元三角分解法的通用程序;
原理:列主元素消去法是为控制舍入误差而提出来的一种算法,列主元素消去法计算基本上能控制舍入误差的影响,其基本思想是:在进行第 k(k=1,2,...,n-1)步消元时,从第k列的 akk及其以下的各元素中选取绝对值最大的元素,然后通过行变换将它交换到主元素akk的位置上,再进行消元。
列主元消去法的基本思想是:在进行第 步消元时,从第k列的 及其以下的各元素中选取绝对值最大的元素,然后通过行变换将它交换到主元素 的位置上,再进行消元。
C+实现:
#include #include #include using namespace std;
int m, n,i,j,k;
float a[15][15],temp[15],d;
void main()
{
cout << "请问所输入的系数矩阵行数为:";
cin >> m;
cout << "请问所输入的系数矩阵列数为:";
cin >> n;
if (m <= 0 || n <= 0)
{
cout << "输入的格式有误!\n";
}
for (i = 0; i < m; i++)
{
cout << "请输入第" << i + 1 << "行的系数:";
for (j = 0; j < n; j++)
{
cin >> a[i][j];
}
}
cout << "请输入未知向量的值:";
for (i = 0; i < m; i++)
{
cin >> a[i][n];
}
cout << "该方程组的增广矩阵为:\n";
for (i = 0; i < m; i++)
{
for (j = 0; j < n+1; j++)
{
cout << a[i][j]< max)
{
max = fabs(a[i][k]);
hang = i;
}
}
if (a[hang][k] == 0)
{
cout << "无法计算" << endl;
return;
}
if (k != hang) //换行
{
for (i = 0; i < m+1; i++)
{
temp[i] = a[k][i];
a[k][i] = a[hang][i];
a[hang][i] = temp[i];
}
}
cout << "选列主元:\n";
for (i = 0; i < m; i++)
{
for (j = 0; j < n + 1; j++)
{
cout << a[i][j] << " ";
}
cout << "\n";
}
for (i = k + 1; i < m; i++) //消元
{
d = a[i][k] / a[k][k];
for (j = 0; j < n + 1; j++)
{
a[i][j] = a[i][j] - d * a[k][j];
}
}
cout << "消元:\n";
for (i = 0; i < m; i++)
{
for (j = 0; j < n + 1; j++)
{
cout << a[i][j] << " ";
}
cout << "\n";
}
}
memset(temp, 0, 15 * sizeof(float)); //将temp清0,准备存放解向量
for (i = m-1; i >= 0; i--) //求解向量
{
d = 0;
for (k = 0; k < n; k++)
{
d = d + temp[k] * a[i][k];
}
temp[i] = (a[i][n] - d) / a[i][i];
}
cout << "此方程组的解向量转置为:("; //输出解向量
for (i = 0; i < m; i++)
{
cout << " "<< fixed << setprecision(5) << temp[i];//5位小数
}
cout << " )"<< endl;
}
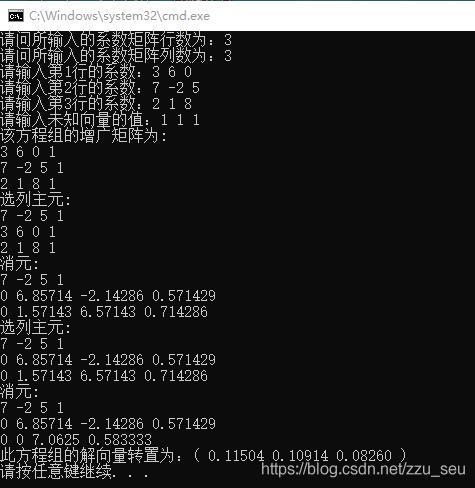
运行测试:例如计算:















 3639
3639











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









