






 本文通过客观数据对比华为P20Pro与iPhone8的拍照效果,发现P20Pro在理想画质下分辨率稍高,但iPhone8在宽容度上更优。在低光环境下,由于P20Pro缺乏光学防抖,高ISO导致画质下降,而iPhone8在暗部细节上表现出色。两者在不同场景下各有优势,总体表现接近。
本文通过客观数据对比华为P20Pro与iPhone8的拍照效果,发现P20Pro在理想画质下分辨率稍高,但iPhone8在宽容度上更优。在低光环境下,由于P20Pro缺乏光学防抖,高ISO导致画质下降,而iPhone8在暗部细节上表现出色。两者在不同场景下各有优势,总体表现接近。
客观数据告诉你华为p20 pro的拍照到底什么水平
2018-05-23 19:03:20
19点赞
16收藏
40评论
前言
本文以gsmarena提供的照片作云测评,相较于dxo的随手拍更为严谨,选取的对比对象是iphone8,一是我自己在用,二是价钱相近。直入主题
注:p20 pro全程不开ai 超级夜景等功能,同理iphone8不开hdr 华为 HUAWEI P20 Pro 全面屏徕卡三摄 6GB +64GB 宝石蓝 全网通版 移动联通电信4G手机 双卡双待4988元京东去购买
华为 HUAWEI P20 Pro 全面屏徕卡三摄 6GB +64GB 宝石蓝 全网通版 移动联通电信4G手机 双卡双待4988元京东去购买 Apple iPhone 8 (A1863) 64GB 深空灰色 移动联通电信4G手机4899元京东去购买
Apple iPhone 8 (A1863) 64GB 深空灰色 移动联通电信4G手机4899元京东去购买
理想情况下的标版测试对比
根据gsmarena的说明,标版测试是手动选择最低iso进行拍摄多张,再挑选其中表现最好的照片:
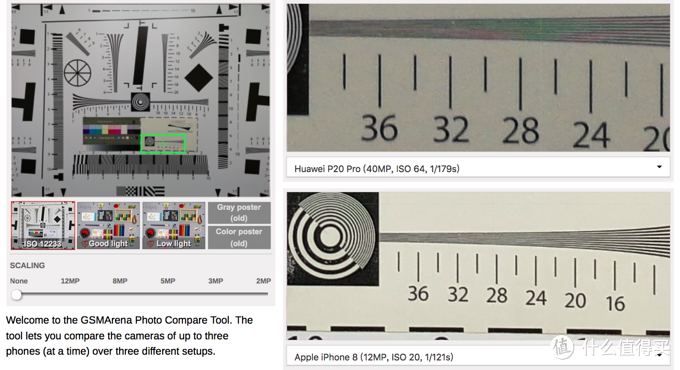
100%放大图片可以看到,p20的分辨率大概在32-28中间,而iphone8在28左右,在分辨率上,p20略略好一点
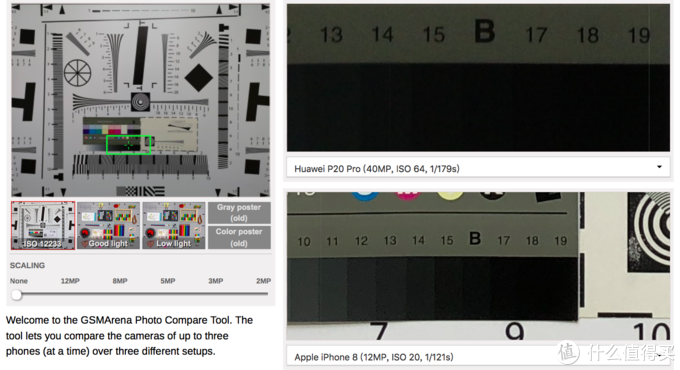
100%放大图片可以看到,p20最多能分辨15跟16所对应的格子,iphone8最多能分辨16跟17所对应的格子,虽然p20的表现较差跟曝光度较低有关,但造成曝光较低的原因是p20的测光系统问题,所以暗部细节仍算iphone8稍好
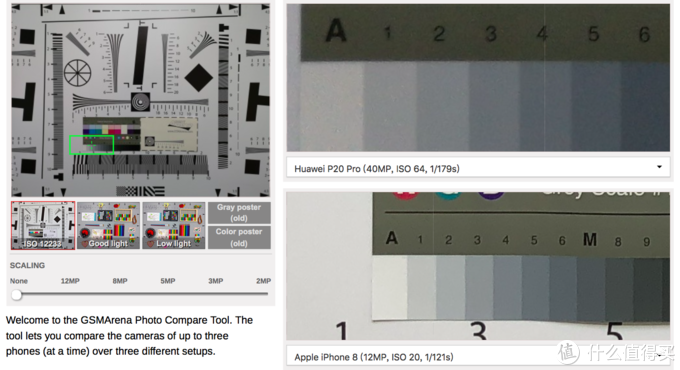
亮部细节都没有任何过曝问题。
总结一下,在标版测试部分,p20在分辨率上略好那么一点点,iphone8在宽容度上略好那么一点点。
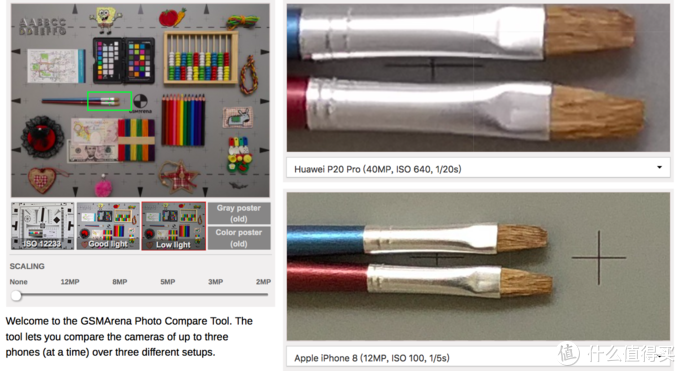
明亮环境下的物品测试
这部分跟上部分一样,都是在最低iso下最佳画质的呈现
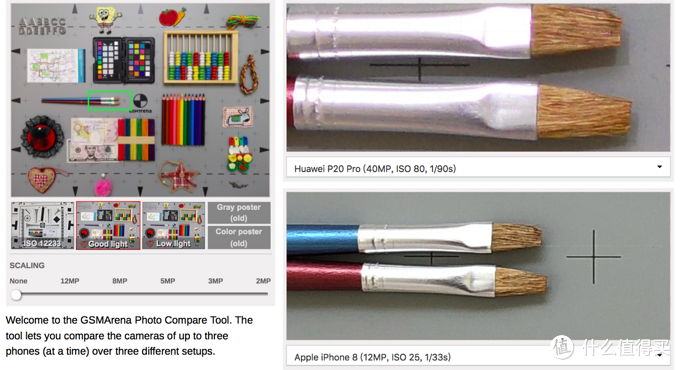
数毛党登场,看笔刷部分,p20的分辨率确实是会高那么一丢丢。再看金属部分,不约而同地都过曝了,亮部宽容度都不行,不过p20紫边严重,这里有两种可能性:一是iphone本来就没有紫边,说明iphone的镜头较好;二是iphone用算法去除紫边了,但这样会导致分辨率的降低。
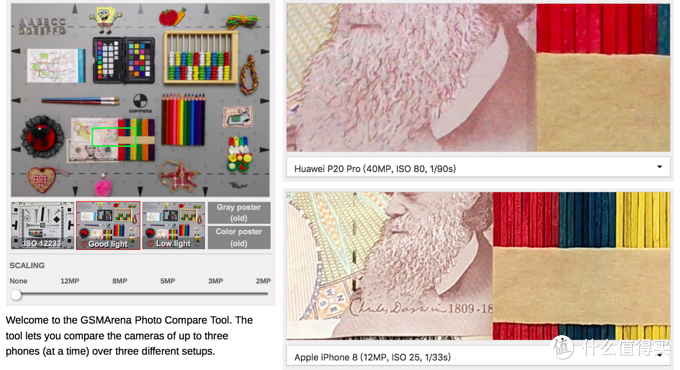
数毛党再次登场,看人像的衣服领子,p20可以看到细细的纹路,iphone8基本看不到,由此可以推断,上面iphone8的紫边是算法去除的,所以在这里也把衣服的纹路给抹去了。
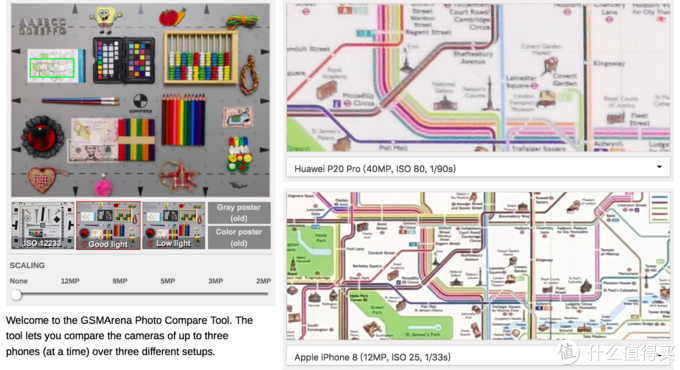
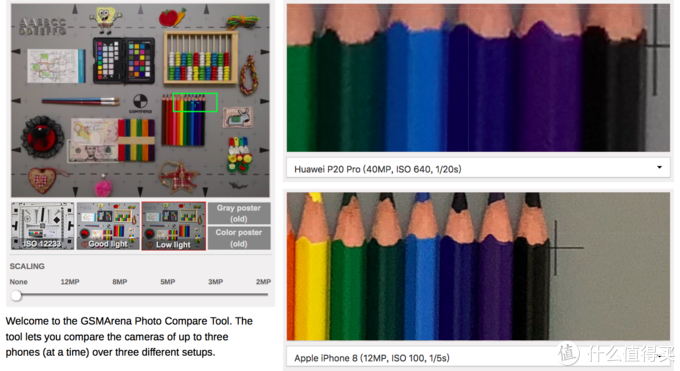
100%放大后可以看到,p20基本能辨认完全站点大写的字母,而iphone8只能辨认少数诸如C这种。
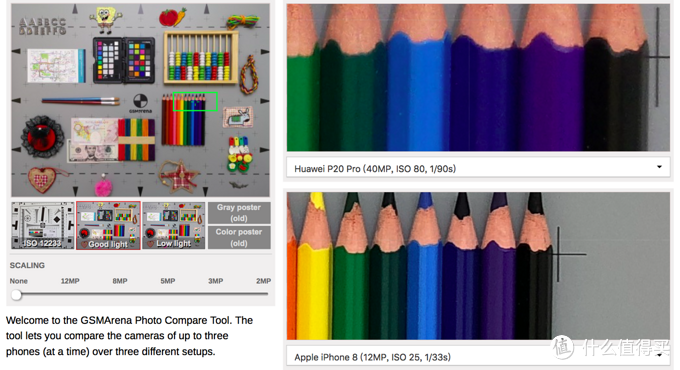
注意看最右边的黑色铅笔的笔杆,iphone8的暗部细节颜色层次要比p20要好。
小结一下,跟标版测试一样,p20在分辨率上要略好一点点,而iphone8在宽容度上要略好一点点。
低光下的实际测试
此环节测试按照说明,是在28lux下用全自动模式拍摄而得。
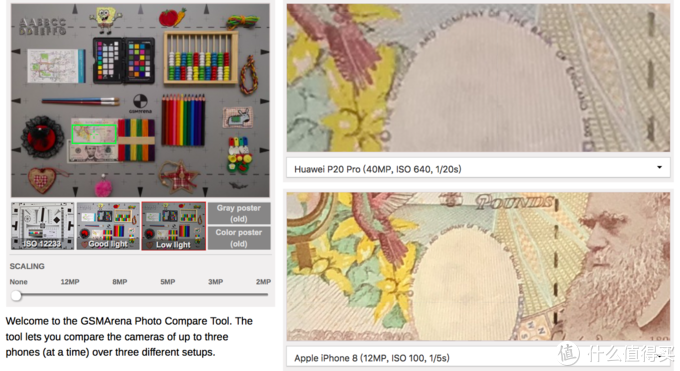
这次不数毛了,因为低光环境iso上升导致无毛可数…
我们看那一圈小字,100%放大的话可以看到iphone8还是可以辨认清楚的,而p20这时就有些勉强了——这是为什么呢?前面不都是p20分辨率更高么?大家看一眼iso就明白了,我知道可能会有人喊不公平,但别忘了,p20是没有光学防抖的,这就意味着为了不让照片糊成一片,就只能抬高iso降低画质。
结果跟上图一样,分辨率要比iphone8差一些了。两台机子高光一样溢出。
同样的,暗部宽容度iphone8是要好一些。
总结
在理想画质下,p20pro的分辨率稍微要高一点,同时,iphone8的宽容度要好一些。这个结论很好理解,p20是4000万像素,理所当然要比1200万像素的分辨率要高,但受限于手机镜头素质(不会真的有人以为那是徕卡吧),4000万像素远远没有发挥出实力,所以仅比1200万像素要好那么一点点点;但4000万像素带来的副作用就是单个像素面积小,造成宽容度较低,所幸整块cmos面积较大,所以宽容度才比iphone8差一点点点。
而在非理想情况下,因为p20没有光学防抖,只能依靠提高iso来防止手抖,导致画质下降严重。
关于实际拍摄中小白常用的ai模式徕卡滤镜,这个比较主观,各个人试过才知道自己喜不喜欢。
至于超级夜景,个人觉得就是官方炫技用的鸡肋,且不说没多少人会拍星空银河,会拍星空银河的人也不会拿手机拍,就算要拿手机拍,iphone8的宽容度更好拿电脑堆栈效果会更好,硬要跟我扯方便程度ios也有app可以做到。
该摆的证据都摆了,最后一句话,半斤八两。


















 1138
1138

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









