






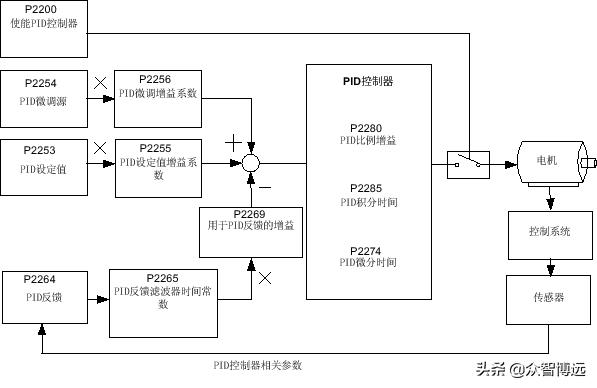
西门子V20变频器如何设置PID控制器变频器内置的PID控制器(工艺控制器)支持多种简单过程控制任务,例如,压力控制、水位控制或流量控制。PID控制器以受控过程变量对应其设定值的方式来定义电机的速度设定值。
设置参数
参数
功能
设置
主要功能参数
P2200[0...2]
BI:使能 PID 控制器
此参数允许用户使能/禁止 PID 控制器。参数值设为1时使能PID闭环控制器。
参数值为1时自动禁止P1120和P1121中设定的常规斜坡时间以及常规频率设定值。
工厂缺省值:0
P2235[0...2]
BI:使能PID-MOP(UP命令)
此参数定义UP命令源。
可能的参数值设置:19.13(BOP),722.x(数字量输入),2036.13(RS485上的USS)
P2236[0...2]
BI:使能PID-MOP(DOWN命令)
此参数定义DOWN命令源。
可能的参数值设置:19.14(BOP),722.x(数字量输入),2036.14(RS485上的USS)
额外调试参数
P2251
PID模式
= 0:PID作为设定值(工厂缺省值)
= 1:PID作为微调源
P2253[0...2]
CI:PID 设定值此参数定义PID设定值输入的设定值源。
可能的参数值设置:755[0](模拟量输入1),2018.1(USS PZD 2),2224(固定PID实际设定值),2250(PID-MOP输出设定值)
P2254[0...2]
CI:PID微调源
此参数选择PID设定值的微调源。
可能的参数值设置:755[0](模拟量输入1),2018.1(USS PZD 2),2224(固定PID实际设定值),2250(PID-MOP输出设定值)
P2255
PID设定值增益系数
范围:0.00 至 100.00(工厂缺省值:100.00)
P2256
PID微调增益系数
范围:0.00 至 100.00(工厂缺省值:100.00)
P2257
PID设定值斜坡上升时间[s]
范围:0.00 至 650.00(工厂缺省值:1.00)
P2258
PID设定值斜坡下降时间[s]
范围:0.00 至 650.00(工厂缺省值:1.00)
P2263
PID控制器类型
= 0:D分量作用于反馈信号(工厂缺省值)
= 1:D分量作用于误差信号
P2264[0...2]
CI:PID 反馈
可能的参数值设置:755[0](模拟量输入1),2224(固定PID实际设定值),2250(PID-MOP输出设定值)
工厂缺省值:755[0]
P2265
PID反馈滤波器时间常数[s]
范围:0.00 至 60.00(工厂缺省值:0.00)
P2267
PID反馈的最大值[%]
范围:-200.00 至 200.00(工厂缺省值:100.00)
P2268
PID反馈的最小值[%]
范围:-200.00 至 200.00(工厂缺省值:0.00)
P2269
用于PID反馈的增益
范围:0.00 至 500.00(工厂缺省值:100.00)
P2270
PID反馈函数选择器
= 0:禁止(工厂缺省值)
= 1:平方根(root(x))
= 2:平方(x*x)
= 3:立方(x*x*x)
P2271
PID转换器类型
= 0:禁止(工厂缺省值)
= 1:PID反馈信号反相
P2274
PID微分时间[s]
范围:0.000至60.000
工厂缺省值:0.000(微分时间不产生任何影响)
P2280
PID比例增益
范围:0.000 至 65.000(工厂缺省值:3.000)
P2285
PID积分时间[s]
范围:0.000 至 60.000(工厂缺省值:0.000)
P2291
PID输出上限[%]
范围:-200.00 至 200.00(工厂缺省值:100.00)
P2292
PID输出下限[%]
范围:-200.00 至 200.00(工厂缺省值:0.00)
P2293
PID 极限值的斜坡上升/下降时间[s]
范围:0.00 至 100.00(工厂缺省值:1.00)
P2295
用于PID输出的增益
范围:-100.00 至 100.00(工厂缺省值:100.00)
P2350
PID自整定使能
= 0:禁止PID自整定(工厂缺省值)
= 1:PID自整定采用Ziegler Nichols (ZN)标准
= 2:PID 自整定同 1,加上一些超调(O/S)
= 3:PID 自整定同 2,但超调(O/S)很少或没有
= 4:PID 自整定只改变 P 和 I 的值,四分之一阻尼响应
P2354
PID整定超时长度[s]
范围:60 至 65000(工厂缺省值:240)
P2355
PID整定补偿[%]
范围:0.00 至 20.00(工厂缺省值:5.00)
输出值
r2224
CO:固定PID实际设定值[%]
r2225.0
BO:PID固定频率状态
r2245
CO:RFG的PID-MOP输入频率[%]
r2250
CO:PID-MOP输出设定值[%]
r2260
CO:PID-RFG后的PID设定值[%]
P2261
PID设定值滤波器时间常数[s]
r2262
CO:RFG后经过滤波的PID设定值[%]
r2266
CO:经过滤波的PID反馈[%]
r2272
CO:PID定标反馈[%]
r2273
CO:PID误差[%]
r2294
CO:PID输出实际值[%]














 6518
6518











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









