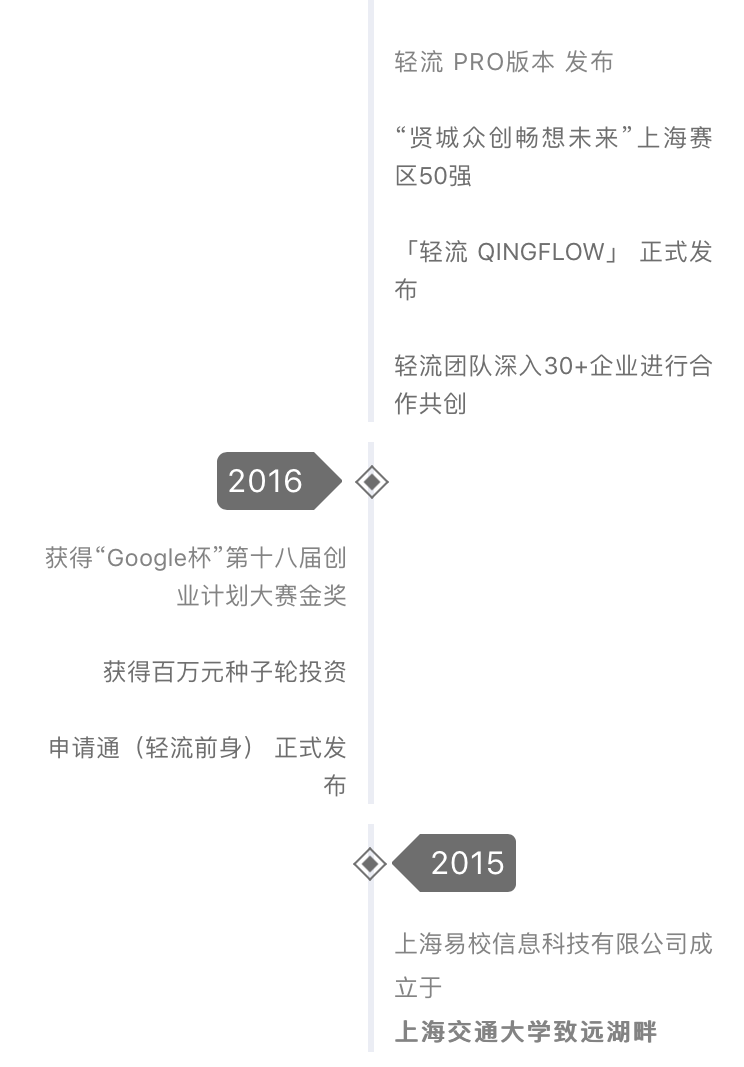
2015年,在上海交通大学的创业工作室中,轻流团队正式组建。以用技术实力帮助中小企业增效赋能为使命,这个团队毫不犹豫出发了。最开始的几个成员,深入到30余家企业挖掘需求痛点,进入到工厂车间,下到施工现场,深入企业办公环境,一步步去了解企业管理中存在的问题,探索如何让团队之间的协作更加高效。
起初,轻流也遇到了很多质疑,对于我们这样一个以“90后”为主的年轻团队,如何打造一款企业管理软件?开发出的工具是否能够真正满足企业的需要?
我们用事实和数据,证明了我们的方向。作为互联网的原住民,我们将传统软件的“流程思维”和互联网的“连接能力”相结合,带着一颗对未知领域探索的心,积极寻找每一种提升企业效率的方法,抓住每一丝改变世界的可能。
每一次产品的更新迭代,每一个团队壮大的阶段,每一波客户的翻倍增长,每一份奖项的认可肯定,都是轻流团队一步一个脚印踏实前行的印证。
其实成功的道路并不拥挤,因为坚持的人不多!
终于,在2017年7月24日,轻流1.0版本正式上线,当时的轻流以表单为入口,流程为引擎,开始了流程驱动企业业务的道路。相比2015年公司的成立,产品的正式上线比预想的要晚一些。

一路走来,我们坚守初心,努力探索BPM在中小型企业和团队中的应用价值;我们不断的打磨产品、探索企业管理,以帮助企业实现降本增效。

新的征程,我们的产品更新依旧是保持每周更新迭代的频率。今年5月份,我们上线了轻流PC端2.0版本:
轻流2.0 未知世界的探索者
轻流产品负责人:我们为何设计 2.0

这次,我们自内而外重新审视产品的特性及用户的每一条建议,并大刀阔斧地进行改革创新,只为给用户带来更有价值产品。

每一个深夜,除了路灯,亮光的十二层就是为了提供更好服务而奋战的轻流ers,这里一群未知领域的探索者正在前行!
在轻流上线即将两周年的日子,我们会继续坚守初心,努力为中小微企业的管理和信息化做出更大的贡献,探索更多的可能!
说了这么多,轻流这款产品适用于哪些业务场景?市场反馈如何呢?
作为一款无代码业务流程管理系统搭建工具,轻流打破传统企业管理系统老旧、难用、笨重的困境,让业务人员无需用IT支持便可搭建所需的管理系统;轻流服务工程建筑、教育培训、互联网、汽车制造、家装建材和生活服务等众多行业;支持企业资源管理、工程项目管理、行政财务管理、人力资源管理、客户关系管理等诸多业务场景。

依托于无代码、自动化、第三方连接等突出特点,目前已经有超过100000+的海内外企业及高校都在使用轻流促进内外部团队协作;轻流也已经完成了三轮融资,已经成长为一款专业且功能强大的企业业务流程管理工具。
细数从2015年成立到现在,感谢我们每一步的经历都有您的见证和认可:






















 1640
1640











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









