






九、Deep Learning的常用模型或者方法
9.1、AutoEncoder自动编码器
Deep Learning最简单的一种方法是利用人工神经网络的特点,人工神经网络(ANN)本身就是具有层次结构的系统,如果给定一个神经网络,我们假设其输出与输入是相同的,然后训练调整其参数,得到每一层中的权重。自然地,我们就得到了输入I的几种不同表示(每一层代表一种表示),这些表示就是特征。自动编码器就是一种尽可能复现输入信号的神经网络。为了实现这种复现,自动编码器就必须捕捉可以代表输入数据的最重要的因素,就像PCA那样,找到可以代表原信息的主要成分。
具体过程简单的说明如下:
1)给定无标签数据,用非监督学习学习特征:
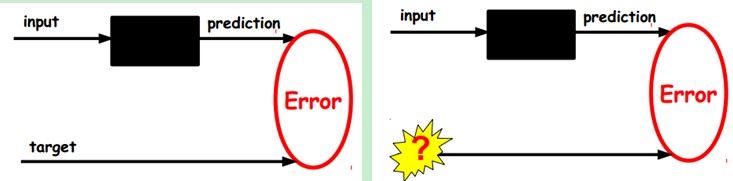
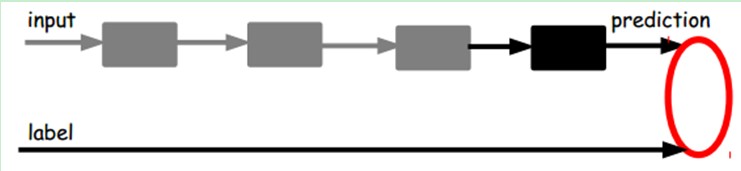
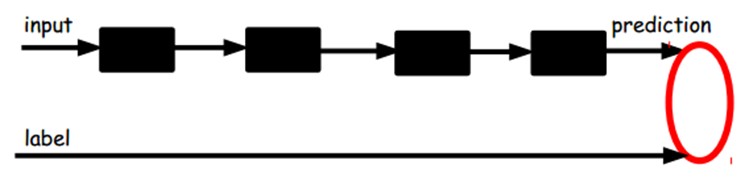
在我们之前的神经网络中,如第一个图,我们输入的样本是有标签的,即(input, target),这样我们根据当前输出和target(label)之间的差去改变前面各层的参数,直到收敛。但现在我们只有无标签数据,也就是右边的图。那么这个误差怎么得到呢?
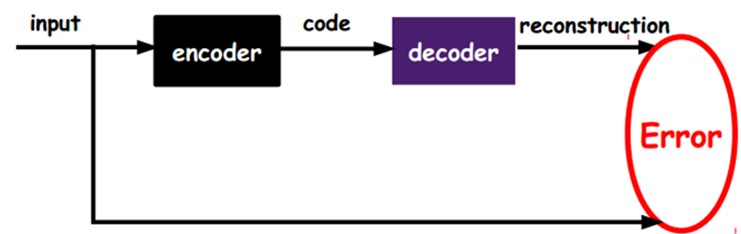
如上图,我们将input输入一个encoder编码器,就会得到一个code,这个code也就是输入的一个表示,那么我们怎么知道这个code表示的就是input呢?我们加一个decoder解码器,这时候decoder就会输出一个信息,那么如果输出的这个信息和一开始的输入信号input是很像的(理想情况下就是一样的),那很明显,我们就有理由相信这个code是靠谱的。所以,我们就通过调整encoder和decoder的参数,使得重构误差最小,这时候我们就得到了输入input信号的第一个表示了,也就是编码code了。因为是无标签数据,所以误差的来源就是直接重构后与原输入相比得到。
2)通过编码器产生特征,然后训练下一层。这样逐层训练:
那上面我们就得到第一层的code,我们的重构误差最小让我们相信这个code就是原输入信号的良好表达了,或者牵强点说,它和原信号是一模一样的(表达不一样,反映的是一个东西)。那第二层和第一层的训练方式就没有差别了,我们将第一层输出的code当成第二层的输入信号,同样最小化重构误差,就会得到第二层的参数,并且得到第二层输入的code,也就是原输入信息的第二个表达了。其他层就同样的方法炮制就行了(训练这一层,前面层的参数都是固定的,并且他们的decoder已经没用了,都不需要了)。
3)有监督微调:
经过上面的方法,我们就可以得到很多层了。至于需要多少层(或者深度需要多少,这个目前本身就没有一个科学的评价方法)需要自己试验调了。每一层都会得到原始输入的不同的表达。当然了,我们觉得它是越抽象越好了,就像人的视觉系统一样。
到这里,这个AutoEncoder还不能用来分类数据,因为它还没有学习如何去连结一个输入和一个类。它只是学会了如何去重构或者复现它的输入而已。或者说,它只是学习获得了一个可以良好代表输入的特征,这个特征可以最大程度上代表原输入信号。那么,为了实现分类,我们就可以在AutoEncoder的最顶的编码层添加一个分类器(例如罗杰斯特回归、SVM等),然后通过标准的多层神经网络的监督训练方法(梯度下降法)去训练。
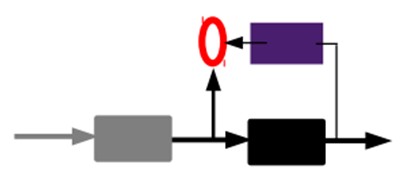
也就是说,这时候,我们需要将最后层的特征code输入到最后的分类器,通过有标签样本,通过监督学习进行微调,这也分两种,一个是只调整分类器(黑色部分):
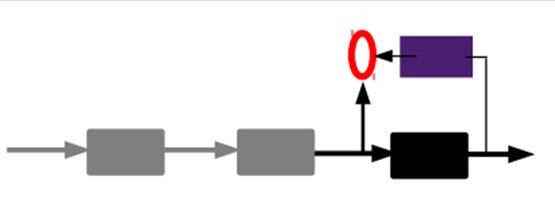
另一种:通过有标签样本,微调整个系统:(如果有足够多的数据,这个是最好的。end-to-end learning端对端学习)
一旦监督训练完成,这个网络就可以用来分类了。神经网络的最顶层可以作为一个线性分类器,然后我们可以用一个更好性能的分类器去取代它。
在研究中可以发现,如果在原有的特征中加入这些自动学习得到的特征可以大大提高精确度,甚至在分类问题中比目前最好的分类算法效果还要好!
AutoEncoder存在一些变体,这里简要介绍下两个:
Sparse AutoEncoder稀疏自动编码器:
当然,我们还可以继续加上一些约束条件得到新的Deep Learning方法,如:如果在AutoEncoder的基础上加上L1的Regularity限制(L1主要是约束每一层中的节点中大部分都要为0,只有少数不为0,这就是Sparse名字的来源),我们就可以得到Sparse AutoEncoder法。
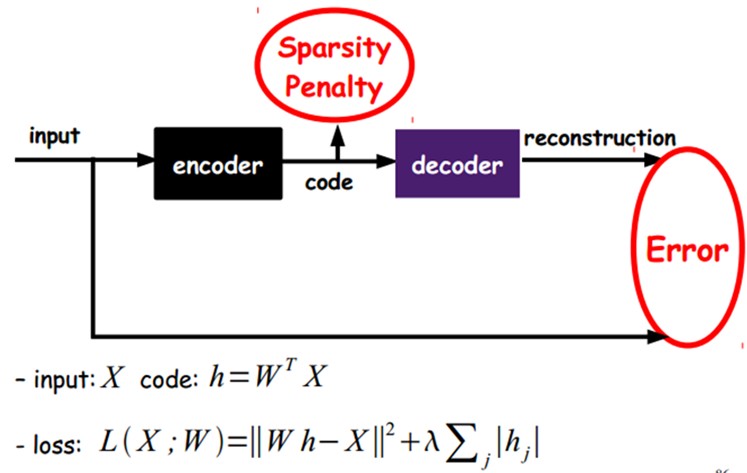
如上图,其实就是限制每次得到的表达code尽量稀疏。因为稀疏的表达往往比其他的表达要有效(人脑好像也是这样的,某个输入只是刺激某些神经元,其他的大部分的神经元是受到抑制的)。
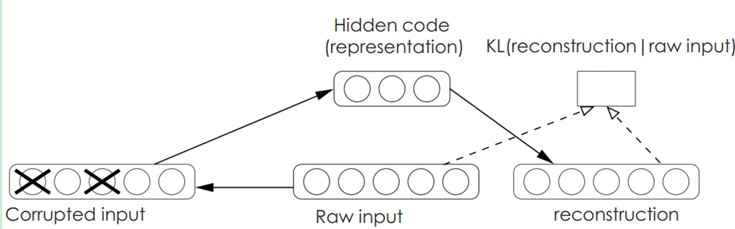
Denoising AutoEncoders降噪自动编码器:
降噪自动编码器DA是在自动编码器的基础上,训练数据加入噪声,所以自动编码器必须学习去去除这种噪声而获得真正的没有被噪声污染过的输入。因此,这就迫使编码器去学习输入信号的更加鲁棒的表达,这也是它的泛化能力比一般编码器强的原因。DA可以通过梯度下降算法去训练。
9.2、Sparse Coding稀疏编码
如果我们把输出必须和输入相等的限制放松,同时利用线性代数中基的概念,即O = a1*Φ1 + a2*Φ2+….+ an*Φn, Φi是基,ai是系数,我们可以得到这样一个优化问题:
Min |I – O|,其中I表示输入,O表示输出。
通过求解这个最优化式子,我们可以求得系数ai和基Φi,这些系数和基就是输入的另外一种近似表达。
因此,它们可以用来表达输入I,这个过程也是自动学习得到的。如果我们在上述式子上加上L1的Regularity限制,得到:
Min |I – O| + u*(|a1| + |a2| + … + |an |)
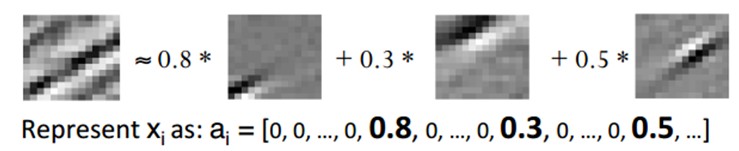
这种方法被称为Sparse Coding。通俗的说,就是将一个信号表示为一组基的线性组合,而且要求只需要较少的几个基就可以将信号表示出来。“稀疏性”定义为:只有很少的几个非零元素或只有很少的几个远大于零的元素。要求系数 ai 是稀疏的意思就是说:对于一组输入向量,我们只想有尽可能少的几个系数远大于零。选择使用具有稀疏性的分量来表示我们的输入数据是有原因的,因为绝大多数的感官数据,比如自然图像,可以被表示成少量基本元素的叠加,在图像中这些基本元素可以是面或者线。同时,比如与初级视觉皮层的类比过程也因此得到了提升(人脑有大量的神经元,但对于某些图像或者边缘只有很少的神经元兴奋,其他都处于抑制状态)。
稀疏编码算法是一种无监督学习方法,它用来寻找一组“超完备”基向量来更高效地表示样本数据。虽然形如主成分分析技术(PCA)能使我们方便地找到一组“完备”基向量,但是这里我们想要做的是找到一组“超完备”基向量来表示输入向量(也就是说,基向量的个数比输入向量的维数要大)。超完备基的好处是它们能更有效地找出隐含在输入数据内部的结构与模式。然而,对于超完备基来说,系数ai不再由输入向量唯一确定。因此,在稀疏编码算法中,我们另加了一个评判标准“稀疏性”来解决因超完备而导致的退化(degeneracy)问题。(详细过程请参考:UFLDL Tutorial稀疏编码)
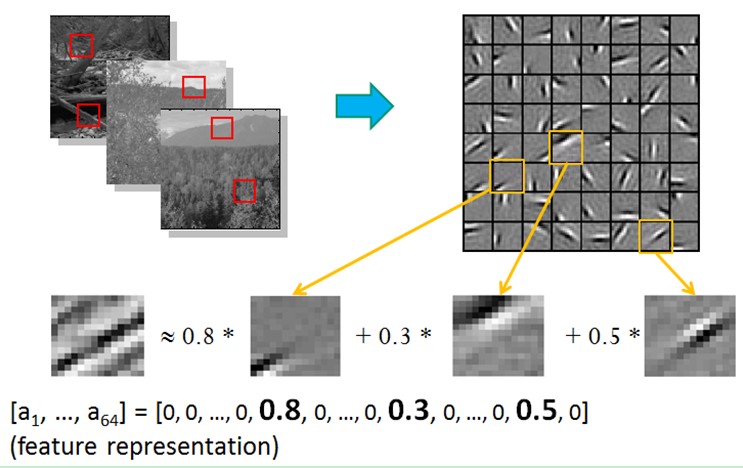
比如在图像的Feature Extraction的最底层要做Edge Detector的生成,那么这里的工作就是从Natural Images中randomly选取一些小patch,通过这些patch生成能够描述他们的“基”,也就是右边的8*8=64个basis组成的basis,然后给定一个test patch, 我们可以按照上面的式子通过basis的线性组合得到,而sparse matrix就是a,下图中的a中有64个维度,其中非零项只有3个,故称“sparse”。
这里可能大家会有疑问,为什么把底层作为Edge Detector呢?上层又是什么呢?这里做个简单解释大家就会明白,之所以是Edge Detector是因为不同方向的Edge就能够描述出整幅图像,所以不同方向的Edge自然就是图像的basis了……而上一层的basis组合的结果,上上层又是上一层的组合basis……(就是上面第四部分的时候咱们说的那样)
Sparse coding分为两个部分:
1)Training阶段:给定一系列的样本图片[x1, x 2, …],我们需要学习得到一组基[Φ1, Φ2, …],也就是字典。
稀疏编码是k-means算法的变体,其训练过程也差不多(EM算法的思想:如果要优化的目标函数包含两个变量,如L(W, B),那么我们可以先固定W,调整B使得L最小,然后再固定B,调整W使L最小,这样迭代交替,不断将L推向最小值。EM算法可以见我的博客:“从最大似然到EM算法浅解”)。
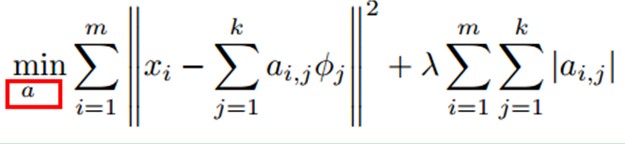
训练过程就是一个重复迭代的过程,按上面所说,我们交替的更改a和Φ使得下面这个目标函数最小。
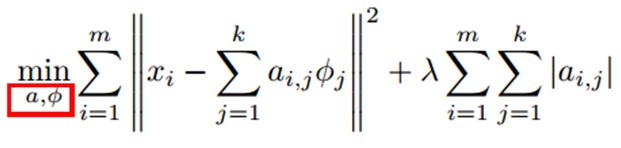
每次迭代分两步:
a)固定字典Φ[k],然后调整a[k],使得上式,即目标函数最小(即解LASSO问题)。
b)然后固定住a [k],调整Φ [k],使得上式,即目标函数最小(即解凸QP问题)。
不断迭代,直至收敛。这样就可以得到一组可以良好表示这一系列x的基,也就是字典。
2)Coding阶段:给定一个新的图片x,由上面得到的字典,通过解一个LASSO问题得到稀疏向量a。这个稀疏向量就是这个输入向量x的一个稀疏表达了。
例如:
9.3、Restricted Boltzmann Machine (RBM)限制波尔兹曼机
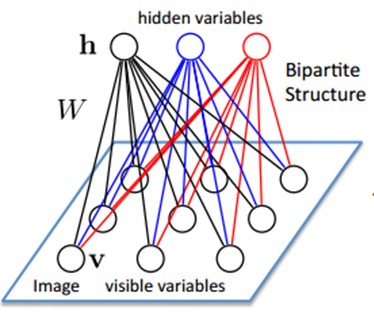
假设有一个二部图,每一层的节点之间没有链接,一层是可视层,即输入数据层(v),一层是隐藏层(h),如果假设所有的节点都是随机二值变量节点(只能取0或者1值),同时假设全概率分布p(v,h)满足Boltzmann 分布,我们称这个模型是Restricted BoltzmannMachine (RBM)。
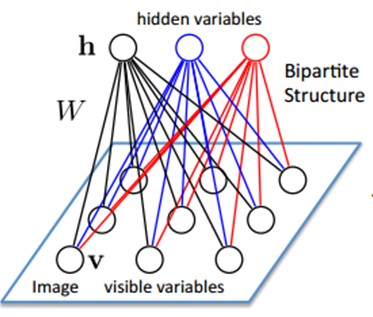
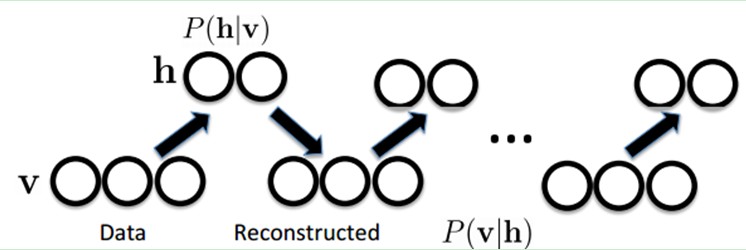
下面我们来看看为什么它是Deep Learning方法。首先,这个模型因为是二部图,所以在已知v的情况下,所有的隐藏节点之间是条件独立的(因为节点之间不存在连接),即p(h|v)=p(h1|v)…p(hn|v)。同理,在已知隐藏层h的情况下,所有的可视节点都是条件独立的。同时又由于所有的v和h满足Boltzmann 分布,因此,当输入v的时候,通过p(h|v) 可以得到隐藏层h,而得到隐藏层h之后,通过p(v|h)又能得到可视层,通过调整参数,我们就是要使得从隐藏层得到的可视层v1与原来的可视层v如果一样,那么得到的隐藏层就是可视层另外一种表达,因此隐藏层可以作为可视层输入数据的特征,所以它就是一种Deep Learning方法。
如何训练呢?也就是可视层节点和隐节点间的权值怎么确定呢?我们需要做一些数学分析。也就是模型了。
联合组态(jointconfiguration)的能量可以表示为:

而某个组态的联合概率分布可以通过Boltzmann 分布(和这个组态的能量)来确定:

因为隐藏节点之间是条件独立的(因为节点之间不存在连接),即:
然后我们可以比较容易(对上式进行因子分解Factorizes)得到在给定可视层v的基础上,隐层第j个节点为1或者为0的概率:

同理,在给定隐层h的基础上,可视层第i个节点为1或者为0的概率也可以容易得到:

给定一个满足独立同分布的样本集:D={v(1), v(2),…, v(N)},我们需要学习参数θ={W,a,b}。
我们最大化以下对数似然函数(最大似然估计:对于某个概率模型,我们需要选择一个参数,让我们当前的观测样本的概率最大):

也就是对最大对数似然函数求导,就可以得到L最大时对应的参数W了。

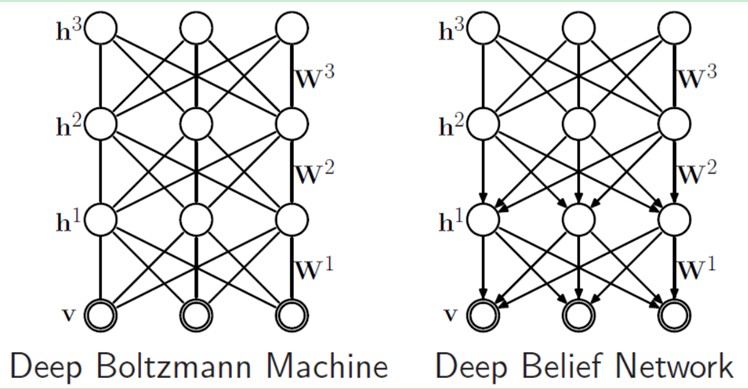
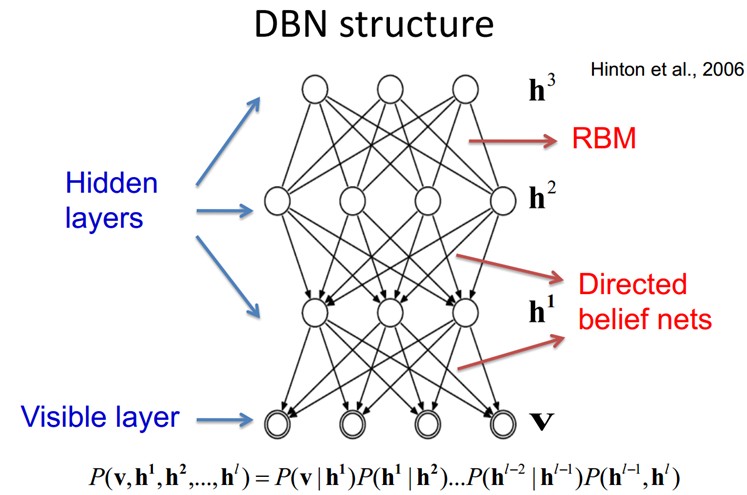
如果,我们把隐藏层的层数增加,我们可以得到Deep Boltzmann Machine(DBM);如果我们在靠近可视层的部分使用贝叶斯信念网络(即有向图模型,当然这里依然限制层中节点之间没有链接),而在最远离可视层的部分使用Restricted Boltzmann Machine,我们可以得到DeepBelief Net(DBN)。
9.4、Deep Belief Networks深信度网络
DBNs是一个概率生成模型,与传统的判别模型的神经网络相对,生成模型是建立一个观察数据和标签之间的联合分布,对P(Observation|Label)和 P(Label|Observation)都做了评估,而判别模型仅仅而已评估了后者,也就是P(Label|Observation)。对于在深度神经网络应用传统的BP算法的时候,DBNs遇到了以下问题:
(1)需要为训练提供一个有标签的样本集;
(2)学习过程较慢;
(3)不适当的参数选择会导致学习收敛于局部最优解。
DBNs由多个限制玻尔兹曼机(Restricted Boltzmann Machines)层组成,一个典型的神经网络类型如图三所示。这些网络被“限制”为一个可视层和一个隐层,层间存在连接,但层内的单元间不存在连接。隐层单元被训练去捕捉在可视层表现出来的高阶数据的相关性。
首先,先不考虑最顶构成一个联想记忆(associative memory)的两层,一个DBN的连接是通过自顶向下的生成权值来指导确定的,RBMs就像一个建筑块一样,相比传统和深度分层的sigmoid信念网络,它能易于连接权值的学习。
最开始的时候,通过一个非监督贪婪逐层方法去预训练获得生成模型的权值,非监督贪婪逐层方法被Hinton证明是有效的,并被其称为对比分歧(contrastive divergence)。
在这个训练阶段,在可视层会产生一个向量v,通过它将值传递到隐层。反过来,可视层的输入会被随机的选择,以尝试去重构原始的输入信号。最后,这些新的可视的神经元激活单元将前向传递重构隐层激活单元,获得h(在训练过程中,首先将可视向量值映射给隐单元;然后可视单元由隐层单元重建;这些新可视单元再次映射给隐单元,这样就获取新的隐单元。执行这种反复步骤叫做吉布斯采样)。这些后退和前进的步骤就是我们熟悉的Gibbs采样,而隐层激活单元和可视层输入之间的相关性差别就作为权值更新的主要依据。
训练时间会显著的减少,因为只需要单个步骤就可以接近最大似然学习。增加进网络的每一层都会改进训练数据的对数概率,我们可以理解为越来越接近能量的真实表达。这个有意义的拓展,和无标签数据的使用,是任何一个深度学习应用的决定性的因素。
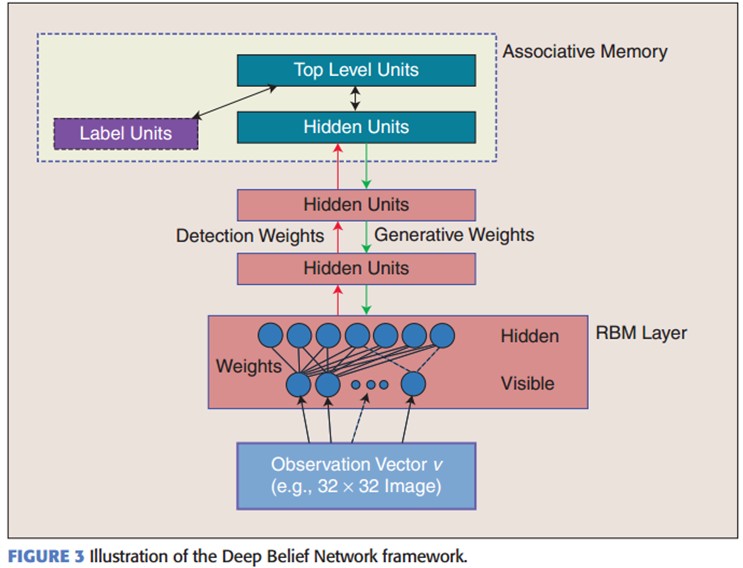
在最高两层,权值被连接到一起,这样更低层的输出将会提供一个参考的线索或者关联给顶层,这样顶层就会将其联系到它的记忆内容。而我们最关心的,最后想得到的就是判别性能,例如分类任务里面。
在预训练后,DBN可以通过利用带标签数据用BP算法去对判别性能做调整。在这里,一个标签集将被附加到顶层(推广联想记忆),通过一个自下向上的,学习到的识别权值获得一个网络的分类面。这个性能会比单纯的BP算法训练的网络好。这可以很直观的解释,DBNs的BP算法只需要对权值参数空间进行一个局部的搜索,这相比前向神经网络来说,训练是要快的,而且收敛的时间也少。
DBNs的灵活性使得它的拓展比较容易。一个拓展就是卷积DBNs(Convolutional Deep Belief Networks(CDBNs))。DBNs并没有考虑到图像的2维结构信息,因为输入是简单的从一个图像矩阵一维向量化的。而CDBNs就是考虑到了这个问题,它利用邻域像素的空域关系,通过一个称为卷积RBMs的模型区达到生成模型的变换不变性,而且可以容易得变换到高维图像。DBNs并没有明确地处理对观察变量的时间联系的学习上,虽然目前已经有这方面的研究,例如堆叠时间RBMs,以此为推广,有序列学习的dubbed temporal convolutionmachines,这种序列学习的应用,给语音信号处理问题带来了一个让人激动的未来研究方向。
目前,和DBNs有关的研究包括堆叠自动编码器,它是通过用堆叠自动编码器来替换传统DBNs里面的RBMs。这就使得可以通过同样的规则来训练产生深度多层神经网络架构,但它缺少层的参数化的严格要求。与DBNs不同,自动编码器使用判别模型,这样这个结构就很难采样输入采样空间,这就使得网络更难捕捉它的内部表达。但是,降噪自动编码器却能很好的避免这个问题,并且比传统的DBNs更优。它通过在训练过程添加随机的污染并堆叠产生场泛化性能。训练单一的降噪自动编码器的过程和RBMs训练生成模型的过程一样。
















 1302
1302

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









