



 本文详细介绍了三维空间中的旋转方法,包括基于欧拉角的旋转、绕任意轴旋转以及四元数旋转,并对比了它们的特点和应用场景。
本文详细介绍了三维空间中的旋转方法,包括基于欧拉角的旋转、绕任意轴旋转以及四元数旋转,并对比了它们的特点和应用场景。
-
通过绕三个坐标轴的旋转之和。
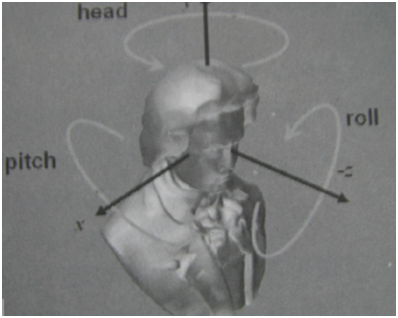
X、Y、Z分别描述绕三个坐标轴的旋转角度(0~360)。这三个角度称为欧拉角。绕X轴旋转的角称为倾斜角(pitch),绕Y轴旋转的角称为翻滚角(head或yaw),绕Z轴旋转的角称为摇摆角(roll)。物体的朝向一般可以用欧拉角表示,因此朝向的插值问题可以简单地转化为三个欧拉角的插值问题。但欧拉角表示也有它的局限性。因为旋转矩阵是不可交换的,基于欧拉角的旋转一定要按某个特定的次序进行;此外。等量的欧拉角变化不一定引起等量的旋转变化,从而导致旋转的不均匀;欧拉角还有可能导致自由度的丧失,出现万向节死锁现象。在使用三个旋转值来分别进行旋转变换的组合时,由于各个旋转是顺序进行的,绕一个轴的旋转会覆盖绕别的轴的旋转,会导致推动旋转的某个角度。例如:如果一个平行X轴的向量绕一个Y轴旋转90度,平等于X轴,那么,所有绕Z轴的旋转都不再起作用。

XNA中主要通过Matrix. CreateRotationX、Matrix. CreateRotationY、Matrix. CreateRotationZ方法实现欧拉角的旋转。这三个方法都是通过旋转角度生成一个旋转矩阵。如生成绕Y轴的旋转的矩阵代码如下:
 public
static
Matrix CreateRotationX(
float
radians)
public
static
Matrix CreateRotationX(
float
radians)2


 {
{3
 Matrix matrix;
Matrix matrix;4
float num2 = (float) Math.Cos((double) radians);5
float num = (float) Math.Sin((double) radians);6
matrix.M11 = 1f;7
matrix.M12 = 0f;8
matrix.M13 = 0f;9
matrix.M14 = 0f;10
matrix.M21 = 0f;11
matrix.M22 = num2;12
matrix.M23 = num;13
matrix.M24 = 0f;14
matrix.M31 = 0f;15
matrix.M32 = -num;16
matrix.M33 = num2;17
matrix.M34 = 0f;18
matrix.M41 = 0f;19
matrix.M42 = 0f;20
matrix.M43 = 0f;21
matrix.M44 = 1f;22
return matrix;23
 }
}
24
25
26
27
28
XNA中也有一个Matrix.CreateFromYawPitchRoll方法,起初我也以为它是生成欧拉角旋转矩阵的,但在分析过他的实现代码后才发现,它其实是生成了一个四元数:
1
public static Matrix CreateFromYawPitchRoll(float yaw, float pitch, float roll)2
{3
Matrix matrix;4
Quaternion quaternion;5
Quaternion.CreateFromYawPitchRoll(yaw, pitch, roll, out quaternion);6
CreateFromQuaternion(ref quaternion, out matrix);7
return matrix;8
}
这里是传说中将欧拉角转换为四元数的方法:
public
static
void
CreateFromYawPitchRoll(
float
yaw,
float
pitch,
float
roll,
out
Quaternion result)2
{3
float num9 = roll * 0.5f;4
float num6 = (float) Math.Sin((double) num9);5
float num5 = (float) Math.Cos((double) num9);6
float num8 = pitch * 0.5f;7
float num4 = (float) Math.Sin((double) num8);8
float num3 = (float) Math.Cos((double) num8);9
float num7 = yaw * 0.5f;10
float num2 = (float) Math.Sin((double) num7);11
float num = (float) Math.Cos((double) num7);12
result.X = ((num * num4) * num5) + ((num2 * num3) * num6);13
result.Y = ((num2 * num3) * num5) - ((num * num4) * num6);14
result.Z = ((num * num3) * num6) - ((num2 * num4) * num5);15
result.W = ((num * num3) * num5) + ((num2 * num4) * num6);16
}
17
18
19
20
21
2.绕任意轴旋转
绕任意轴旋转需要两个参数:一个向量和一个角度,其中向量表示旋转轴,角度表示将要旋转的角度(0~360度)。
使用这种方法来进行旋转变化时,两个方向之间的插值不够够平滑,容易导致出现抖动等问题,如下图所示:
这种方法在XNA中主要通过 Matrix.CreateFromYawPitchRoll方法来实现。方法内容如下:
1
public static Quaternion CreateFromAxisAngle(Vector3 axis, float angle)2
{3
Quaternion quaternion;4
float num2 = angle * 0.5f;5
float num = (float) Math.Sin((double) num2);6
float num3 = (float) Math.Cos((double) num2);7
quaternion.X = axis.X * num;8
quaternion.Y = axis.Y * num;9
quaternion.Z = axis.Z * num;10
quaternion.W = num3;11
return quaternion;12
}
3.四元数旋转。
我们知道在实现绕任意轴旋转方面,以上两种方法都不够完美,而使用四元数来旋转则显得非常得体。
XNA中通过Matrix.CreateFromQuaternion方法创建旋转矩阵。实现方法如下:
1
public static Matrix CreateFromQuaternion(Quaternion quaternion)2
{3
Matrix matrix;4
float num9 = quaternion.X * quaternion.X;5
float num8 = quaternion.Y * quaternion.Y;6
float num7 = quaternion.Z * quaternion.Z;7
float num6 = quaternion.X * quaternion.Y;8
float num5 = quaternion.Z * quaternion.W;9
float num4 = quaternion.Z * quaternion.X;10
float num3 = quaternion.Y * quaternion.W;11
float num2 = quaternion.Y * quaternion.Z;12
float num = quaternion.X * quaternion.W;13
matrix.M11 = 1f - (2f * (num8 + num7));14
matrix.M12 = 2f * (num6 + num5);15
matrix.M13 = 2f * (num4 - num3);16
matrix.M14 = 0f;17
matrix.M21 = 2f * (num6 - num5);18
matrix.M22 = 1f - (2f * (num7 + num9));19
matrix.M23 = 2f * (num2 + num);20
matrix.M24 = 0f;21
matrix.M31 = 2f * (num4 + num3);22
matrix.M32 = 2f * (num2 - num);23
matrix.M33 = 1f - (2f * (num8 + num9));24
matrix.M34 = 0f;25
matrix.M41 = 0f;26
matrix.M42 = 0f;27
matrix.M43 = 0f;28
matrix.M44 = 1f;29
return matrix;30
}31
32
33
34
35
Quaternion类的构造为Quaternion(float x, float y, float z, float w),当然也还可以通过CreateFromAxisAngle、CreateFromRotationMatrix、CreateFromYawPitchRoll等方法将其它的旋转方法转换为四元数。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









