点击上方“AI算法修炼营”,选择加星标或“置顶”
标题以下,全是干货
来自 | 知乎
作者丨1335
来源丨https://www.zhihu.com/question/22298352/answer/1071892762
仅作学术交流,如有侵权,请联系删文
我来举个通俗易懂的例子吧。我大一是这么理解记忆的,到现在大四一直没忘记过。
要理解卷积,就必须树立起来“
瞬时行为的持续性后果”这个概念。
举个例子。在一个时刻点,我以迅雷不及掩耳之势吃下了一个冰激凌,此时我的体重瞬间增加,之后随着消化吸收能量利用和排泄等生理活动的进行,我的体重又缓慢下降。如下图所示:
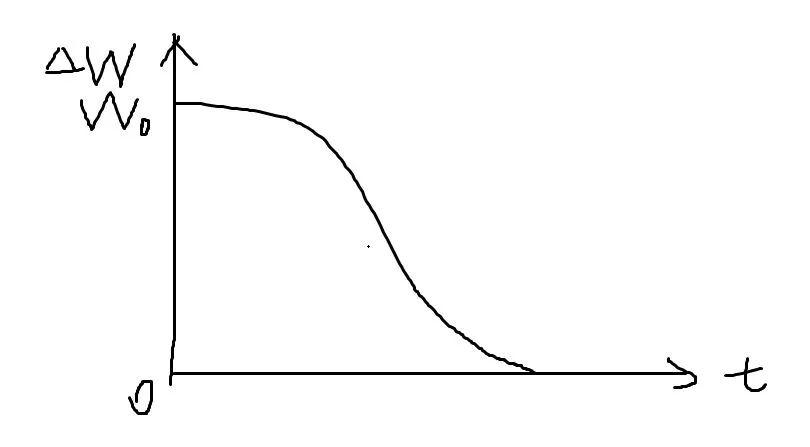
我们把这个函数记为 。我们把基础体重记为0,即没吃冰淇凌的时候体重是0,吃冰淇凌的效果过去了之后体重还是0。我们记每一个冰淇凌带来的瞬间体重增加为 。易知, 。
如何理解“瞬时行为的持续性后果”呢?在这个例子里,
吃冰激凌是瞬间完成的动作,是一个瞬时行为;吃完冰激凌之后的体重的缓慢下降是持续了一段时间的,因此是吃冰激凌这个瞬时行为的一个持续性后果。
此时,只有在0时刻的瞬间吃了一个冰淇凌,在0时刻的瞬间,吃冰淇凌的速度是 ,其中 表示极小的一个时间段;在其他时刻,吃冰淇凌的速度为0。因此,我们可以
用一个冲击函数 来表示在这种情况下吃冰淇凌的速度。
表示的是,当吃冰淇凌的速度为冲击函数的时候,对我的体重的影响。
接下来我们考虑,我吃冰淇凌的频率很低,且每次只在一个瞬间吃一个冰淇凌,每次都等到体重恢复到原来的程度了再吃一个,那么我的体重变化就是这样子的。
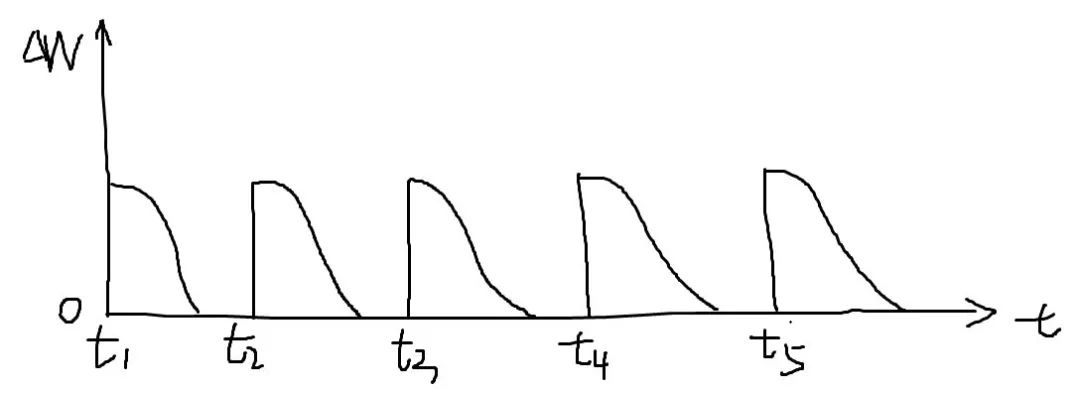
这种情况下,如果我想要知道每一个时刻的体重,只需要知道我吃每个冰淇凌的时刻 ,再知道吃一个冰淇凌的效果 ,很容易就能求出来了。
接下来,我们考虑,
如果我吃冰淇凌的速度恒定为1(注意不是一瞬间吃一个了,不是冲击函数),且时时刻刻都在吃冰淇凌,那么,在我连续吃了时间的冰淇凌之后,我的体重是多少呢?
这个问题是不是有点不好算了呢?之前的冰淇凌增加的体重还没降到0呢,现在的冰淇凌带来的体重就又来了,还一直持续,还是连续的,想想就头疼。
这个时候,要引入两个个原理 。
第一,
线性原理。即,我在一瞬间吃冰淇凌的个数,会以线性的方式作用在冰淇凌对体重的影响函数 上。我在一个瞬间吃了1个冰淇凌,之后我的体重变换是 ,如果我在一个瞬间吃了0.5个冰淇凌,之后我的体重变换是 ,如果n个呢,那就是 。
第二,
累加原理。即,冰淇凌的作用效果是可以累加的。即,一段时间之前我吃了一个冰淇凌,经过了一段时间的体重下降,现在我的体重是 。现在我又吃了一个冰淇凌,体重又增加了。假设这个增加是可以累积的(直观上也是可以累积的),那么我的体重就会是。这就是累加原理。
这时我们来试着计算,在从开始就不停地吃冰淇凌,且吃冰淇凌的速度恒定为1的情况下,在任意时刻我的体重。
由于我在不停地吃冰淇凌,所以,我们先算,在某时刻 附近的一瞬间,我吃的冰淇凌对现在时刻 的我的体重的影响。因为,吃冰淇凌的速度是1,时间是,因此,在这一瞬间我吃的冰淇凌的个数是 。那么根据线性原理,在这一瞬间,我吃的冰淇凌对现在时刻 的我的体重的影响就是 。
那么,根据累加原理,现在时刻 的我的体重就是:从0到 时刻我吃的所有冰淇凌对我的体重的影响的累加,即为:
上面这个式子是不是有点像我们学过的卷积了呢?
我们上面的讨论基于我们吃冰淇凌的速度是常数1,那么,
如果我吃冰淇凌的速度不是常数,而是一个连续变化的函数,如在t时刻,吃冰淇凌的速度是 。
那么,在我连续吃了时间的冰淇凌之后,我的体重是多少呢?
同样,我们先算,在某时刻 附近的一瞬间,我吃的冰淇凌对现在时刻 的我的体重的影响。因为,吃冰淇凌的速度是 ,时间是,因此,在这一瞬间吃的冰淇凌的个数是 。那么根据线性原理,在这一瞬间,我吃的冰淇凌对现在时刻 的我的体重的影响就是 。
再根据累加原理,现在时刻 的我的体重就是:从0到 时刻我吃的所有冰淇凌对我的体重的影响的累加,即为:
这就是大家平时接触到的卷积了!
因此,在我的理解下,我将卷积解释为:
一个对象(本文中的吃冰淇凌)对一个系统(本文中的体重)的作用效果满足
线性原理、累加原理。该对象对这个系统连续作用了一段时间后,求该系统的状态。这个时候,一个卷积就可以求出来了!
在卷积 中,
第一个函数 表示这个对象对系统的作用速度。第二个函数 表示当作用速度为单位冲击函数时这个对象对系统的作用效果。
我们来验证一下第二个函数 的意义。取我吃冰淇凌的速度为单位冲击函数 ,则到时刻 我的体重就是:
的的确确就是我吃冰淇凌的速度为单位冲击函数时,我的体重的变换。
最后,是一点说明。
课本上标准的卷积其实长成下面这个样子,积分区间是 。
这个在我这个case里也比较好理解,主要是考虑到时间的物理意义。
第一,理解当 时, 恒成立。这个比较容易理解,因为,我在 时刻吃的冰淇凌,对吃冰淇凌之前也就是 时刻的我的体重是没有影响的。所以,当 的时候, ,。
第二,理解当时, 恒成立。这个更好理解,就是时间非负性。我是从 时刻开始吃冰淇凌的, 表示我在 时刻吃冰淇凌的速度。的时候,我还没吃冰淇凌呢 ,自然不存在吃冰淇凌的速度这个概念。
所以,
在其他的case里,情况就不一样了。
1、某一个对象的作用域可能不是时间域,不必遵循时间上的因果律。因此,当 时, 。
2、某一个对象的作用域可能不是时间域,作用域存在负数的可能性。因此,当 时, 。
基于以上两点考虑,积分区间就是,也就是课本上标准的卷积形式了!

目标检测系列
秘籍一:模型加速之轻量化网络
秘籍二:非极大值抑制及回归损失优化
秘籍三:多尺度检测
秘籍四:数据增强
秘籍五:解决样本不均衡问题
秘籍六:Anchor-Free
视觉注意力机制系列
Non-local模块与Self-attention之间的关系与区别?
视觉注意力机制用于分类网络:SENet、CBAM、SKNet
Non-local模块与SENet、CBAM的融合:GCNet、DANet
Non-local模块如何改进?来看CCNet、ANN
语义分割系列
一篇看完就懂的语义分割综述
最新实例分割综述:从Mask RCNN 到 BlendMask
超强视频语义分割算法!基于语义流快速而准确的场景解析
CVPR2020 | HANet:通过高度驱动的注意力网络改善城市场景语义分割
基础积累系列
卷积神经网络中的感受野怎么算?
图片中的绝对位置信息,CNN能搞定吗?
理解计算机视觉中的损失函数
深度学习相关的面试考点总结
自动驾驶学习笔记系列
Apollo Udacity自动驾驶课程笔记——高精度地图、厘米级定位
Apollo Udacity自动驾驶课程笔记——感知、预测
Apollo Udacity自动驾驶课程笔记——规划、控制
自动驾驶系统中Lidar和Camera怎么融合?
竞赛与工程项目分享系列
如何让笨重的深度学习模型在移动设备上跑起来
基于Pytorch的YOLO目标检测项目工程大合集
目标检测应用竞赛:铝型材表面瑕疵检测
基于Mask R-CNN的道路物体检测与分割
SLAM系列
视觉SLAM前端:视觉里程计和回环检测
视觉SLAM后端:后端优化和建图模块
视觉SLAM中特征点法开源算法:PTAM、ORB-SLAM
视觉SLAM中直接法开源算法:LSD-SLAM、DSO
视觉SLAM中特征点法和直接法的结合:SVO
2020年最新的iPad Pro上的激光雷达是什么?来聊聊激光SLAM























 250
250











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









