






传感器数据和显示方向 (HTML)
12/11/2015
本文内容
[ 本文适用于编写 Windows 运行时应用的 Windows 8.x 和 Windows Phone 8.x 开发人员。如果你要针对 Windows 10 进行开发,请参阅 最新文档 ]
来自 Accelerometer、Gyrometer、Compass、Inclinometer 和 OrientationSensor 类的传感器数据由其参考轴定义。 这些轴由设备的横向方向定义,并在用户转动设备时与其一起旋转。 如果你的应用支持自动旋转,即,如果它在用户旋转设备时自行重定向以适应设备,则必须先调整关于旋转的传感器数据才能使用它。
显示方向和设备方向
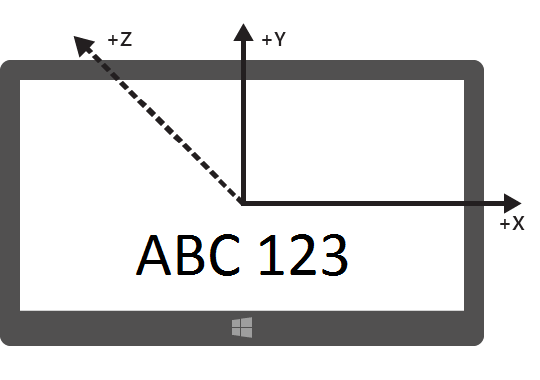
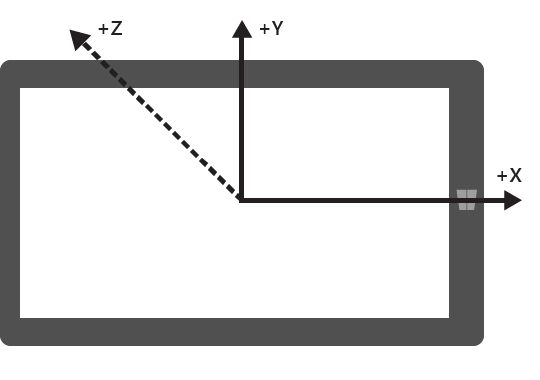
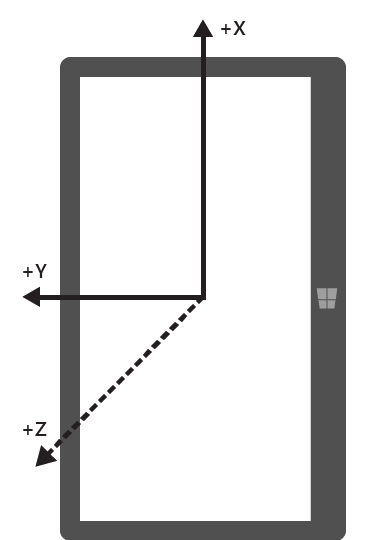
为了了解传感器的参考轴,你需要区分显示方向和设备方向。显示方向是方向文本且图像均显示在屏幕上,而设备方向则是设备的物理定位。在下图中,设备和显示方向都采用 Landscape。
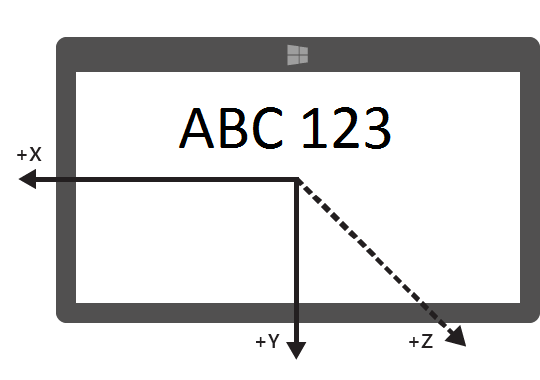
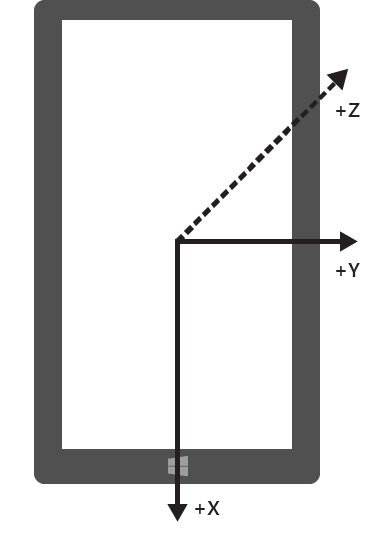
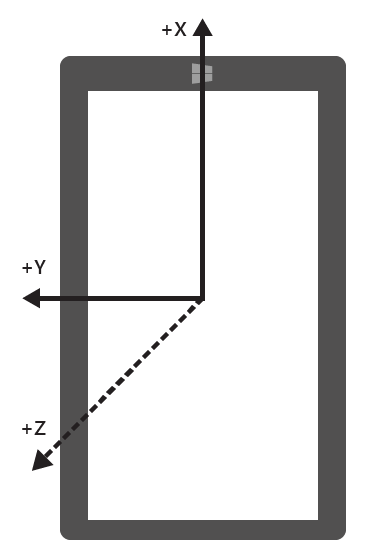
下图显示了采用 LandscapeFlipped 的显示和设备方向。
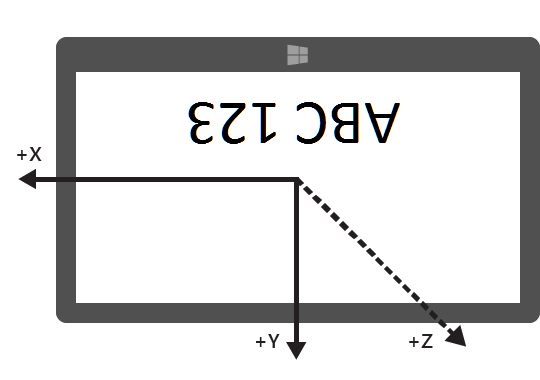
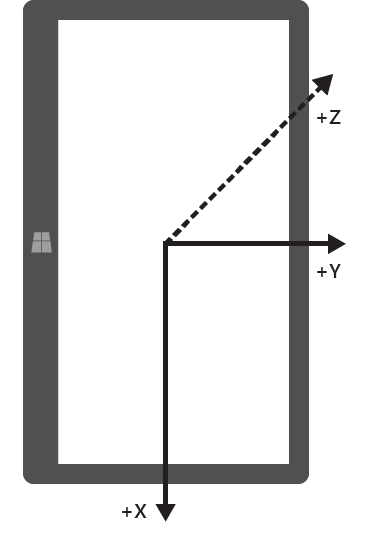
下一张图片显示了采用 Landscape 的显示方向和采用 LandscapeFlipped 的设备方向。
你可以使用具有 CurrentOrientation 属性的 GetForCurrentView 方法以通过 DisplayInformation 类查询方向值。然后,你可以通过与 DisplayOrientations 枚举进行比较来创建逻辑。 请记住,对于你支持的每一个方向,必须支持该方向的参考轴的转换。
优先横向设备和优先纵向设备
制造商现在正在生产优先横向设备和优先纵向设备。当制造商将组件集成到设备中时,他们采用统一且一致的方式执行此操作,以便所有设备均可在相同的参考帧中运行。 下表显示了适用于优先横向设备和优先纵向设备的传感器轴。
方向
优先横向
优先纵向
Landscape
Portrait
LandscapeFlipped

PortraitFlipped
显示方向和指南针方位
指南针方位具体取决于参考轴,因此它随设备方向发生变化。 可以基于此表进行修正(假设用户面朝北方)。
显示方向
用于指南针方位的参考轴
面朝北方时的 API 指南针方位
指南针方位修正
Landscape
-Z
0
方位
Portrait
Y
90
(方位 + 270)% 360
LandscapeFlipped
Z
180
(方位 + 180)% 360
PortraitFlipped
Y
270
(方位 + 90)% 360
修改指南针方位(如该表中所示),以便正确显示方位,如下所示。
function readingChanged(e) {
var heading = e.reading.headingMagneticNorth;
var displayOffset;
// Calculate the compass heading offset based on
// the current display orientation.
var displayInfo = Windows.Graphics.Display.DisplayInformation.getForCurrentView();
switch (displayInfo.currentOrientation) {
case Windows.Graphics.Display.DisplayOrientations.landscape:
displayOffset = 0;
break;
case Windows.Graphics.Display.DisplayOrientations.portrait:
displayOffset = 270;
break;
case Windows.Graphics.Display.DisplayOrientations.landscapeFlipped:
displayOffset = 180;
break;
case Windows.Graphics.Display.DisplayOrientations.portraitFlipped:
displayOffset = 90;
break;
}
var displayCompensatedHeading = (heading + displayOffset) % 360;
// Update the UI...
}
使用加速度计和陀螺测试仪显示方向
此表可转换用于显示方向的加速度计和陀螺测试仪数据。
参考轴
X
Y
Z
Landscape
X
Y
Z
Portrait
Y
-X
Z
LandscapeFlipped
-X
-Y
Z
PortraitFlipped
-Y
X
Z
以下是可将这些转换应用到陀螺测试仪的代码示例。
function readingChanged(e) {
var reading = e.reading;
var displayOffset;
// Calculate the gyrometer axes based on
// the current display orientation.
var displayInfo = Windows.Graphics.Display.DisplayInformation.getForCurrentView();
switch (displayInfo.currentOrientation) {
case Windows.Graphics.Display.DisplayOrientations.landscape:
x_Axis = reading.angularVelocityX;
y_Axis = reading.angularVelocityY;
z_Axis = reading.angularVelocityZ;
break;
case Windows.Graphics.Display.DisplayOrientations.portrait:
x_Axis = reading.angularVelocityY;
y_Axis = -1 * reading.angularVelocityX;
z_Axis = reading.angularVelocityZ;
break;
case Windows.Graphics.Display.DisplayOrientations.landscapeFlipped:
x_Axis = -1 * reading.angularVelocityX;
y_Axis = -1 * reading.angularVelocityY;
z_Axis = reading.angularVelocityZ;
break;
case Windows.Graphics.Display.DisplayOrientations.portraitFlipped:
x_Axis = -1 * reading.angularVelocityY;
y_Axis = reading.angularVelocityX;
z_Axis = reading.angularVelocityZ;
break;
}
// Update the UI...
}
显示方向和设备方向
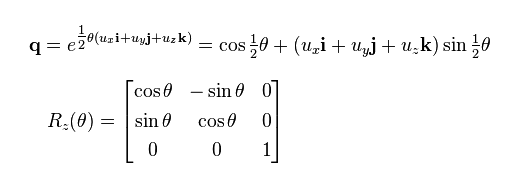
必须采用不同的方式更改 OrientationSensor。 请考虑逆时针旋转到 Z 轴时的不同方向,因此我们需要反向旋转以返回用户的方向。对于四元数数据,我们可以使用欧拉公式定义参考四元数的旋转,也可以使用参考旋转矩阵。
若要获取所需的相对方向,请用参考对象乘以绝对对象。请注意,此数学算法不可应用交换律。
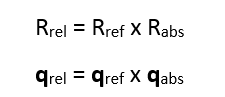
在之前的表达式中,绝对对象由传感器数据返回。
显示方向
围绕 Z 进行逆时针旋转
参考四元数(反向旋转)
参考旋转矩阵(反向旋转)
Landscape
0
1 + 0i + 0j + 0k
[1 0 0
0 1 0
0 0 1]
Portrait
90
cos(-45⁰) + (i + j + k)*sin(-45⁰)
[0 1 0
-1 0 0
0 0 1]
LandscapeFlipped
180
0 - i - j - k
[1 0 0
0 1 0
0 0 1]
PortraitFlipped
270
cos(-135⁰) + (i + j + k)*sin(-135⁰)
[0 -1 0
1 0 0
0 0 1]















 3222
3222











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









