






1.课题概述
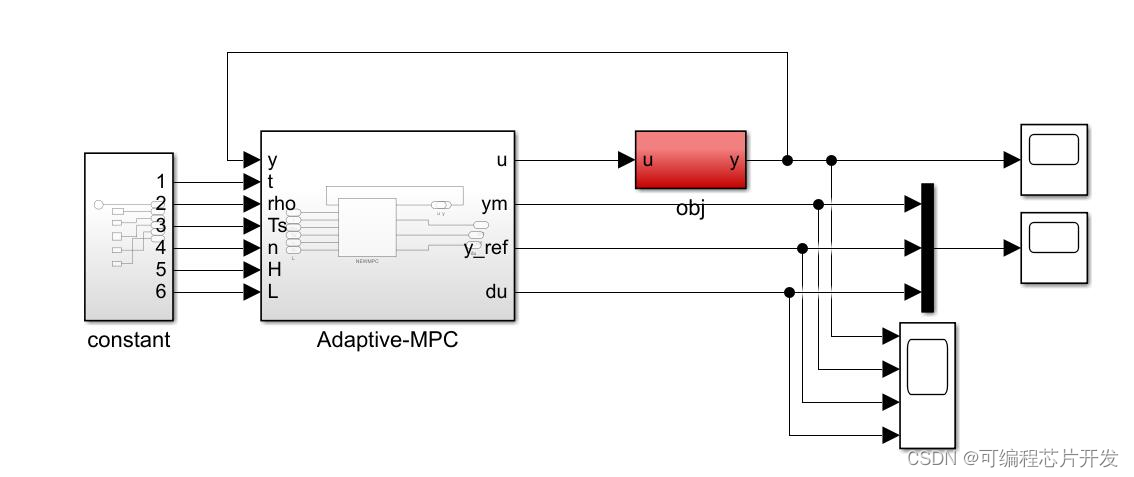
通过simulink内嵌matlab编程的方式实现自适应MPC控制器的,然后在simulink中调用该模型和控制对象,实现自适应MPC控制器的工作过程。
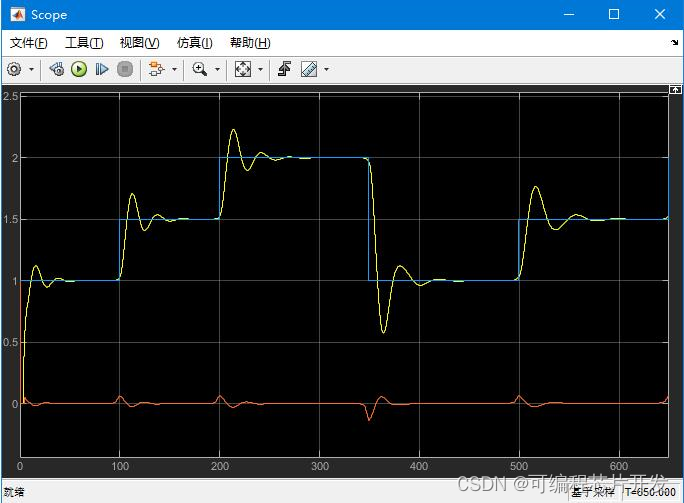
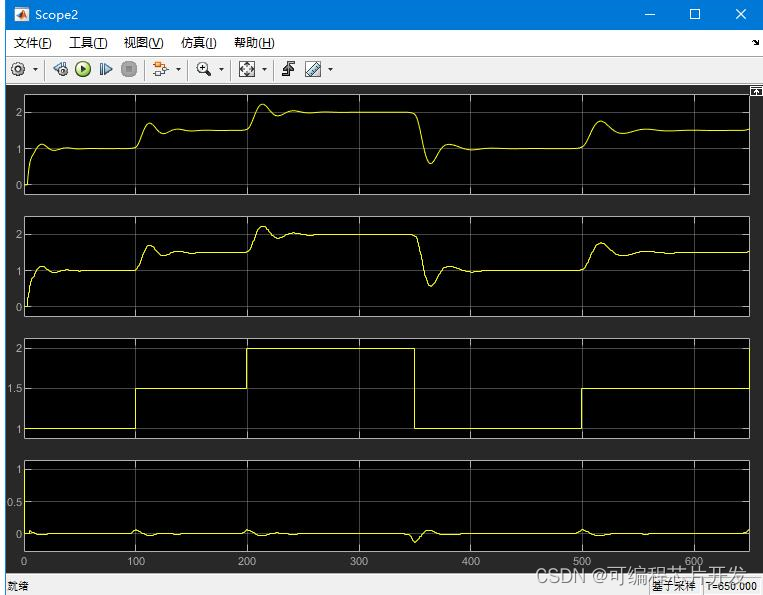
2.系统仿真结果
3.核心程序与模型
版本:MATLAB2022a
4.系统原理简介
随着现代工业过程的复杂性和不确定性不断增加,传统的控制方法往往难以满足高性能的要求。自适应模型预测控制器(AMPC)作为一种先进的控制策略,结合了模型预测控制(MPC)和自适应控制的优点,能够根据系统的实时变化自动调整控制参数,以实现优化控制和鲁棒性能。因此,AMPC在实际应用中具有重要的价值和意义。
4.1 模型预测控制(MPC)
4.2 自适应控制
4.3 AMPC的实现方法
AMPC的实现方法可以分为两个主要步骤:建模和自适应控制律设计。
首先,需要建立一个能够描述系统动态行为的模型。这个模型可以是基于物理定律的白箱模型,也可以是基于数据驱动的灰箱或黑箱模型。模型的准确性对于AMPC的性能至关重要,因此需要根据实际系统的特性和数据进行模型的选择和辨识。
在得到系统模型后,需要设计自适应控制律来实现对系统的优化控制。自适应控制律通常基于性能指标(如跟踪误差、控制能量等)的自适应调整机制,通过实时监测系统输出和模型预测之间的误差,调整控制器的参数,以使性能指标最小化。常用的自适应控制律设计方法包括梯度下降法、最小二乘法等。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









