






一、前言
一般情况下,普通用户在想要去选购一款ITX机箱时,大多数都是看中了它的小体积,当然也有小部分用户就是单纯喜欢ITX机箱的精致、紧凑。体积小的机箱,日常的使用、摆放都会比较方便,因此很多用户会将ITX机箱放置在桌面上。
而放置到桌面上之后,很多看起来体积很小巧的机箱,占地面积却并不小巧,因为他们虽然体积小,但其高度也不高,放到桌面上之后依然会占用不小的面积。
但其实,正常用户的桌面面积的利用率其实并不高,很多边角、显示器后部都是会空出不小的空间。而这些位置由于拿取不方便,日常的利用率并不高。如果能选择一款占地面积小的ITX机箱,巧妙的将这部分的面积利用起来,或许会有不一样的体验。
二、银欣(SilverStone)RVZ03小乌鸦3机箱 开箱
▼银欣这款小乌鸦3机箱的包装看起来一点都不像是机箱的包装,居然不是普通的纸箱,外
还有蓝紫色的渐变。
▼包装侧面印着机箱的型号和外观。

▼另一侧有机箱具体的参数、规格、尺寸。
▼打开纸箱,内部的保护还是挺不错的,无纺布的袋子,两侧是泡沫减震。

▼除了机箱之外,还有一个配件盒。

▼配件盒里面的配件是有够丰富的,防尘网三块,橡胶脚垫若干,还有一些线材之类的。

三、银欣(SilverStone)RVZ03小乌鸦3机箱 外观
▼机箱的外观还是挺漂亮的,看起来非常的苗条,是的,苗条。

▼机箱正面的造型比较酷炫,中间乳白色的部分应该是发光灯带。

▼机箱正面的底部是机箱的IO面板,左侧两个USB3.0和音频接口,右侧是开机、重启键,还有一个指示灯。

▼机箱的背面,金属背板,上面一个开孔,下面两个开孔。

▼机箱尾部,上面是主板的IO面板开孔。

▼下面是电源和显卡的PCIe固定槽,不过看这个方向,貌似是倒装的。

▼打开机箱的侧面金属盖板,就能看到机箱的内部了。

▼另外在机箱的金属盖板上,银欣还标配了超薄设计的机箱风扇。

▼机箱内部的空间设计还是非常有意思的,左上角是主板安装位,主板竖置安装在上方,显卡竖置、倒装,安装在下方。

▼主板的右侧是电源的安装位,最大支持ATX规格的电源,兼容性好评。

▼金属的电源安装支架,默认就是ATX规格的。

▼机箱底部是显卡的安装位,这个塑料部分貌似是显卡的安装支架,左侧还有两个2.5英寸的硬盘固定位。

▼显卡的安装支架可以轻松拆下。

▼内侧有PCIe插槽,右侧是PCIe槽的固定金属件,这是一个一体式的结构。

▼拆掉显卡固定支架之后的机箱底部,线材还是挺多的。

▼另外银欣这块小乌鸦3机箱时ARGB版的,这里还附赠了一个小小的ARGB灯效控制板,兼具ARGB HUB的功能。

四、银欣(SilverStone)RVZ03小乌鸦3机箱 装机
▼这里准备装机,处理器是R5 3600,主板是技嘉的X570I,内存是宇瞻的NOX暗黑女神8G*2 3600MHz。

▼电源用的酷妈的V750GOLD SFX电源,这里为了散热考虑,选择了体积更小的SFX电源。酷妈这里很贴心,虽然是SFX规格的电源,但是电源包装里面附赠了ATX的转接板。

▼酷妈的SFX电源全系列都非常漂亮,并且这里安装SFX规格的电源,空间会空出来不少,有利于散热。

▼酷妈的V750GOLD SFX电源是全模组的,一般装机的话使用原装的模组线就可以。

▼插上对应的主板、显卡、CPU的供电模组线,其余的线材可以不装,减小理线的压力。

▼安装好电源,并顺手将主板和CPU的供电装好。

▼接着安装显卡,银欣的小乌鸦3这款机箱对显卡的兼容性超强,即使是ROG的这款RTX2070Super A8G显卡,也能轻松的塞进去。

▼显卡安装有专门的PCIe转接和支架固定,需要先安装到支架上。

▼然后再将显卡装进机箱内部。

▼最后盖上机箱的侧面面板,整机安装完成。

▼开机,一次点亮,完美!整机的颜值还是很高的,机箱正面有非常漂亮的ARGB灯条,灯效简单、漂亮,但是丝毫没有光污染的感觉。

▼机箱侧面银欣标配有超薄的机箱风扇,朝内吹风的,机箱内部是微正压的散热,然后配件盒里面赠送的防尘网可以固定在这里。

▼透过这个位置,依稀还能看到主板上漂亮的RGB内存。

五、银欣(SilverStone)RVZ03小乌鸦3机箱 测试
▼打开鲁大师,看一下整体的配置。处理器是3600,显卡是RTX2070Super。

▼简单跑个分,整机得分44.5W左右,处理器13W,显卡30W。

▼手里的这颗3600感觉体质还行,1.35V轻松上全核4.3,稳定。

▼再跑一遍鲁大师,处理器单独得分涨到了14.5W分。

▼散热测试,技嘉的这个X570I主板供电部分有金属的被动散热,宇瞻的NOX暗黑女神的内存高度也挺高的,蘑菇手里没有合适的下压散热,直接就用原装散热压了。日常的待机温度表现还是挺好的,在43℃左右波动。

▼跑个CPU-Z的压力测试,处理器温度最高稳定在97℃,感觉3600的原装散热压一压默频的3600还行,超频全核4.3G的压不住,等两天换个散热,实在不行搞个3700X的原装散热装上去。

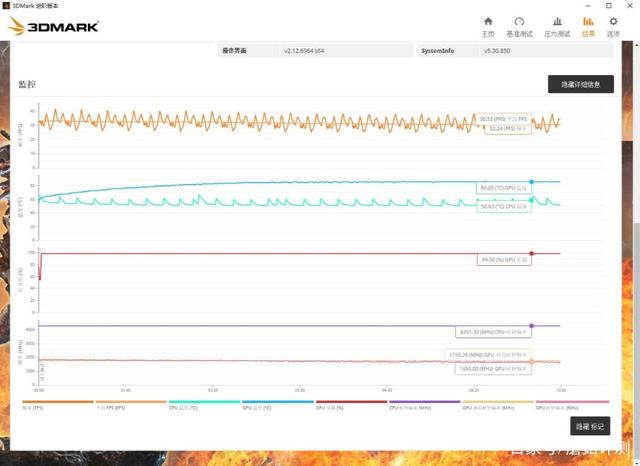
▼跑一下3Dmark的压力测试,室温29℃(蘑菇这两天肚子不舒服,不敢开空调了),显卡的核心温度86℃,处理器的核心温度在56℃上下波动。
▼银欣小乌鸦3 ARGB版这款机箱的颜值是真的漂亮,随便放在桌面上就很漂亮。

▼而且机箱很薄,仅仅比小米9手机略宽一点,什么显示器背面,桌面的边角部分都能轻松放下,很完美!

六、总结
银欣这款小乌鸦3 ARGB版机箱还是非常不错的,机箱的整体外观部分非常漂亮。特别是机箱的正面,外形设计有棱有角的,硬朗的线条,中间点缀有漂亮的ARGB灯效,整体看起来颜值很高。
另外在机箱的内部空间设计上,银欣很有想法,将主板和显卡竖置堆叠摆放,巧妙的通过PCIe转接和显卡倒置安装,将显卡和主板的横向占用的面积叠放到一起,有效的控制机箱的整体占用面积,可以轻松放到桌面上,而不占用太大的面积。当然,配合橡胶脚垫,这款机箱竖放、横放都可以。
机箱内部显卡的兼容性一流,就连ROG的这款RTX2070Super A8G显卡都能塞进去,这可是一款越肩、2.5槽厚度、三风扇散热的显卡,又长又宽又厚。当然,实际如果安装显卡,蘑菇还是建议安装稍微小一点的显卡,然后将机箱侧面的机箱风扇装好,搭建机箱内部的微正压散热风道。
谢谢大家!
The End.
举报/反馈














 949
949











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









