







我们在做图像拼接时,最重要的一步就是关于特征点匹配的问题,我们常用到的特征点检测方法有SIFT,SURF以及ORB等,对于特征点匹配我们有Bruteforce方法,Flannbesed方法,这些方法处理完之后,或许特征点匹配效果还是达不到我们想要的结果,这个时候我们需要对我们匹配的特征点进行筛选。下面我来说一说常见的特征点筛选的方法
一丶特征点匹配
这里我们用SIFT方法做例子
Mat img1 = imread("D1.jpg");
Mat img2 = imread("D2.jpg");
//第一步,用SIFT算子检测关键点;
SiftFeatureDetector detector;
std::vector<KeyPoint> m_LeftKey, m_RightKey;//构造2个专门由点组成的点向量用来存储特征点
detector.detect(img1, m_LeftKey);//将img1图像中检测到的特征点存储起来放在m_LeftKey中
detector.detect(img2, m_RightKey);//同理
//计算特征向量
SiftDescriptorExtractor extractor;//定义描述子对象
cv::Mat descriptors1, descriptors2;//存放特征向量的矩阵
extractor.compute(srcImage1, m_LeftKey, descriptors1);
extractor.compute(srcImage2, m_RightKey, descriptors2);
//进行匹配
BruteForceMatcher<L2<float>>matcher;//定义一个burte force matcher对象
vector<DMatch> matches;//定义数据类型为matches的vector容器
matcher.match(descriptors1, descriptors2, matches);//匹配两个图像的特征矩阵 结果如下、
原图:


匹配结果图:

效果不好,有很多错误点,下面就是要消除错误的匹配点、
二丶特征点匹配原理
我们知道特征点匹配主要是将每一个相对应的描述子相减,计算出他们的欧式距离。
下面是我自己写的匹配代码,计算速度较慢,不过有助于理解匹配原理。
1)计算向量之间的欧式距离的函数
//每一个位置的描述子相减
double minkowsky(const vector<float>& v1, const vector<float>& v2, double m)
{
assert(v1.size() == v2.size());//描述子应该都是128维
double ret = 0.0;
for (vector<double>::size_type i = 0; i != v1.size(); ++i)
{
ret += pow(abs(v1[i] - v2[i]), m);//累加每一个向量元素的相减平方值
}
return pow(ret, 1.0 / m);
}
//计算欧式距离
double euclidean(const vector<float>& v1, const vector<float>& v2)
{
assert(v1.size() == v2.size());
return minkowsky(v1, v2, 2.0);
}
2)找出距离最近的点
左图中一个点p1与右图中所有特征点计算欧式距离,找出其距离最近距离的点p2。找出p2点之后,将p2点与左图中所有点计算欧式距离,若距离最近的点为p1,则该两点为匹配点对
//计算距离
Mat m_left_row(1, 128, CV_32S);//创建一个1*128的矩阵 用来保存每一次读取的矩阵
Mat m_right_row(1, 128, CV_32S);
Mat m_rightL_row(1, 128, CV_32S);
Mat m_leftR_row(1, 128, CV_32S);
vector<float>left_des, right_des,rightL_des,leftR_des;
float dist,dist2;
vector<float>distance1,distance2;
int index_l, index_r;
int Count = 0;
vector<KeyPoint>left_keypoint, right_keypoint;
vector<DMatch> matches;
DMatch matches1;
for (int i = 0; i < keypoints1.size(); i++)
{
//将左图第i个特征点描述子矩阵读取出来
MatRow(descriptor1, m_left_row, left_des, i);
for (int j = 0; j < keypoints2.size(); j++)
{
MatRow(descriptor2, m_right_row, right_des, j);
dist=euclidean(left_des, right_des);
// cout << "距离:"<<i<<","<<j <<": "<< dist << endl;
distance1.push_back(dist);//将与每一个距离保存下来
right_des.clear();
}
left_des.clear();
auto smallest_l = min_element(begin(distance1), end(distance1));
index_r =distance(begin(distance1), smallest_l);
//cout << "左边最小距离的位置是:" << index_r << endl;
distance1.clear();
//反过来再利用右边的最近距离特征点与左边的特征点求距离
MatRow(descriptor2, m_rightL_row, rightL_des, index_r);
for (int m = 0; m < keypoints1.size(); m++)
{
MatRow(descriptor1, m_leftR_row, leftR_des, m);
dist2 = euclidean(rightL_des, leftR_des);
distance2.push_back(dist2);
leftR_des.clear();
}
rightL_des.clear();
auto smallest_r = min_element(begin(distance2), end(distance2));
index_l = distance(begin(distance2), smallest_r);
// cout << "左图索引:" << i << endl;
//cout << "右边最小距离的位置是:" << index_l << endl;
//cout<< endl;
distance2.clear();
if (index_l == i)
{
left_keypoint.push_back(keypoints1[i]);
right_keypoint.push_back(keypoints2[index_r]);
matches1 = { i,index_r,*smallest_l };
matches.push_back(matches1);
}
}注:这个在opencv中BruteForce函数中有写好的
class CV_EXPORTS BruteForceMatcher : public BFMatcher
{
public:
BruteForceMatcher( Distance d = Distance() ) : BFMatcher(Distance::normType,true) {(void)d;}
virtual ~BruteForceMatcher() {}
};一般情况下BFMatcher中的第二个参数为false,这是什么意思呢?意思就是左图p1在右图找到最近点p2之后就认为p1和p2是匹配点对了。
我们把这个参数改为true,这样的话p1在右图找到p2之后,还要再判断p2在左图中的最近点是否为p1,如果是,才认为是匹配点对。这样也能过滤一部分错误点。
三丶特征点筛选
上面那种改BFMatcher参数的方法可以减少一些错误的匹配点,下面我总结了一下几种筛选匹配点的方法。
1)距离筛选法
//计算匹配结果中距离的最大和最小值
//距离是指两个特征向量间的欧式距离,表明两个特征的差异,值越小表明两个特征点越接近
double max_dist = 0;
double min_dist = 100;
for (int i = 0; i<matches.size(); i++)
{
double dist = matches[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
cout << "最大距离:" << max_dist << endl;
cout << "最小距离:" << min_dist << endl;
//筛选出较好的匹配点
vector<DMatch> goodMatches;
for (int i = 0; i<matches.size(); i++)
{
if (matches[i].distance < 0.5*(max_dist+min_dist))
{
goodMatches.push_back(matches[i]);
}
}结果如下:

效果好了一些
2)余弦值筛选法
计算每一个匹配点对的余弦值,求出平均余弦值,然后将每一对余弦值与平均余弦值做对比,小于平均余弦值则提出,余弦值为1时相似度最高。
vector<float> vec_all1;//矩阵第一行的向量
vector<float> vec_all2;
vector<float>vec_all3;//用于清空vec_all1和vec_all2的向量
double cosine_sum = 0;
double cosine_average;
double value;
vector<double>value_all;
for (int i = 0; i < goodMatches.size(); i++)
{
int *data1 = descriptors1.ptr<int>(goodMatches[i].queryIdx);
int *data2 = descriptors2.ptr<int>(goodMatches[i].trainIdx);
for (int j = 0; j < 128; j++)
{
int vec1 = data1[j];//读取描述子矩阵的一行的128个描述子,也就是某个特征点的描述子
int vec2 = data2[j];
vec_all1.push_back(vec1);//把描述子加入到一个向量中
vec_all2.push_back(vec2);
}
value = cosine(vec_all1, vec_all2);//计算两个特征点的余弦值
value_all.push_back(value);
cosine_sum = cosine_sum + value;//将余弦值加总
vec_all1.swap(vec_all3);
vec_all2.swap(vec_all3);
}
cosine_average = cosine_sum / goodMatches.size();//求取平均余弦值
cout << "余弦平均值为:" << cosine_average << endl;
vector<DMatch>angle_matches;
for (int n = 0; n < goodMatches.size(); n++)
{
if (value_all[n] > cosine_average) //与平均余弦值作比较 大于平均余弦值的加入到匹配中
{
angle_matches.push_back(goodMatches[n]);
}
}
cout << "角度筛选之后匹配点数" << angle_matches.size() << endl;
cout << "角度筛选筛选掉匹配点个数" << goodMatches.size() - angle_matches.size() << endl;注:上述余弦值筛选法所依赖的函数如下
//计算夹角
double dotProduct(const vector<float>& v1, const vector<float>& v2)
{assert(v1.size() == v2.size());
double ret = 0.0;
for (vector<float>::size_type i = 0; i != v1.size(); ++i)
{
ret += v1[i] * v2[i];
}
return ret;
}
//向量模
double module(const vector<float>& v)
{
double ret = 0.0;
for (vector<float>::size_type i = 0; i != v.size(); ++i)
{
ret += v[i] * v[i];
}
return sqrt(ret);
}
//计算余弦值
double cosine(const vector<float>& v1, const vector<float>& v2)
{
assert(v1.size() == v2.size());
return dotProduct(v1, v2) / (module(v1) * module(v2));
}3)相似度筛选
这个方法我感觉不是特别好,也不是特别常用,不过也可以筛选掉一部分特征点,原理就是:距离相似度=1/(1+距离),利用距离相似度的平均值方法进行筛选,大于平均值则为好的匹配点对
vector<DMatch> goodMatches;//保存筛选完之后的特征点
double similarity;
double similarity_sum = 0;
double similarity_average;//相似度平均值
vector<double>similarity_all;
for (int i = 0; i<matches.size(); i++)
{
similarity = 1 / (1 + matches[i].distance); //距离相似度 = 1 / (1 + 距离)
similarity_sum += similarity;
similarity_all.push_back(similarity);
}
similarity_average = similarity_sum / matches.size();
for (int i = 0; i < matches.size(); i++)
{
if (similarity_all[i] >similarity_average)
{
goodMatches.push_back(matches[i]);
}
}4)ransac筛选法
这个关于ransac的介绍很多,大家可以找来看一看,我给出以下我的ransac过程的代码
//RANSAC匹配过程
vector<DMatch> m_Matches = angle_matches;
cout<<"m_Matches="<<m_Matches.size()<<endl;
// 分配空间
int ptCount = (int)m_Matches.size();
//cout<<"m_Matches="<<ptCount<<endl;
Mat p1(ptCount, 2, CV_32F);
Mat p2(ptCount, 2, CV_32F);
//cout<<"p1="<<p1<<endl;
// 把Keypoint转换为Mat
Point2f pt;
for (int i = 0; i<ptCount; i++)
{
pt = m_LeftKey[m_Matches[i].queryIdx].pt;
p1.at<float>(i, 0) = pt.x;
p1.at<float>(i, 1) = pt.y;
pt = m_RightKey[m_Matches[i].trainIdx].pt;
p2.at<float>(i, 0) = pt.x;
p2.at<float>(i, 1) = pt.y;
}
//cout<<"p1="<<p1<<endl;//图1的匹配点坐标
//cout<<"p2="<<p2<<endl;//图2的匹配点坐标
// 用RANSAC方法计算F(基础矩阵)
Mat m_Fundamental;
vector<uchar> m_RANSACStatus; // 这个变量用于存储RANSAC后每个点的状态
findFundamentalMat(p1, p2, m_RANSACStatus, FM_RANSAC);
// 计算内点个数
int OutlinerCount = 0;
for (int i = 0; i<ptCount; i++)
{
if (m_RANSACStatus[i] == 0) // 状态为0表示外点
{
OutlinerCount++;
}
}
int InlinerCount = ptCount - OutlinerCount; // 计算内点
cout << "内点数为:" << InlinerCount << endl;
cout << "外点数为:" << OutlinerCount << endl;
// 这三个变量用于保存内点和匹配关系
vector<Point2f> m_LeftInlier;
vector<Point2f> m_RightInlier;
vector<DMatch> m_InlierMatches;
m_InlierMatches.resize(InlinerCount);
m_LeftInlier.resize(InlinerCount);
m_RightInlier.resize(InlinerCount);
InlinerCount = 0;
float inlier_minRx = img1.cols; //用于存储内点中右图最小横坐标,以便后续融合
//cout<<"inlier="<<inlier_minRx<<endl;
for (int i = 0; i<ptCount; i++)
{
if (m_RANSACStatus[i] != 0)
{
m_LeftInlier[InlinerCount].x = p1.at<float>(i, 0);
m_LeftInlier[InlinerCount].y = p1.at<float>(i, 1);
m_RightInlier[InlinerCount].x = p2.at<float>(i, 0);
m_RightInlier[InlinerCount].y = p2.at<float>(i, 1);
m_InlierMatches[InlinerCount].queryIdx = InlinerCount;
m_InlierMatches[InlinerCount].trainIdx = InlinerCount;
if (m_RightInlier[InlinerCount].x<inlier_minRx) inlier_minRx = m_RightInlier[InlinerCount].x; //存储内点中右图最小横坐标
InlinerCount++;
}
}
//cout<<"inlier="<<inlier_minRx<<endl;
// 把内点转换为drawMatches可以使用的格式
vector<KeyPoint> key1(InlinerCount);
vector<KeyPoint> key2(InlinerCount);
KeyPoint::convert(m_LeftInlier, key1);
KeyPoint::convert(m_RightInlier, key2);
// 显示计算F过后的内点匹配
Mat OutImage;
drawMatches(img1, key1, img2, key2, m_InlierMatches, OutImage, CV_RGB(255, 0, 255), CV_RGB(0, 255, 0));
imshow("RANSAC match features", OutImage);
imwrite("RansacMatch.tif", OutImage);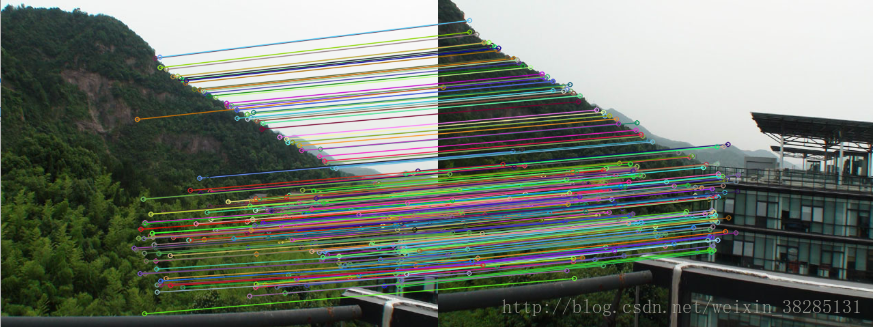
5)最近邻比次近邻方法
最近邻比次近邻法效果比较好,一般用过这个方法之后可以直接进行ransac一般也可以达到很好的效果,这个方法在我的另一篇博客中写了,下面是链接:
http://blog.csdn.net/weixin_38285131/article/details/78487782
这几种方法可以互相混着用,如果效果好的话也可以只用一种方法,总之只要达到我们想要的效果就可以啦。有问题可以跟我交流,仅供参考吧














 2536
2536











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









