






单应性矩阵表示同一个平面在不同相机的图像坐标系下的变换;
三个矩阵之间的关系
单应性矩阵虽然跟本质矩阵同为点在像素坐标系下的变换,但是单应性是中的点是共面的;
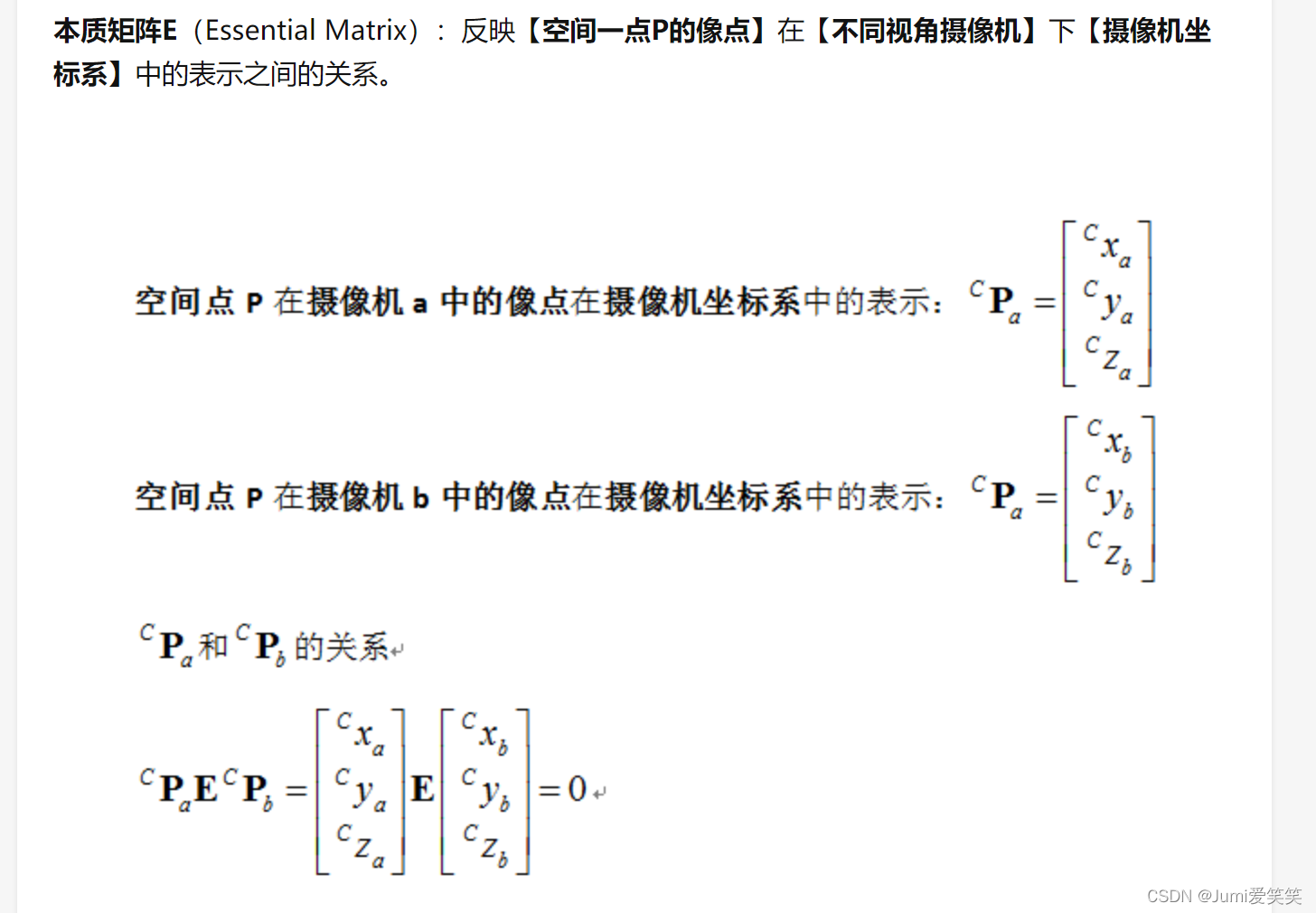
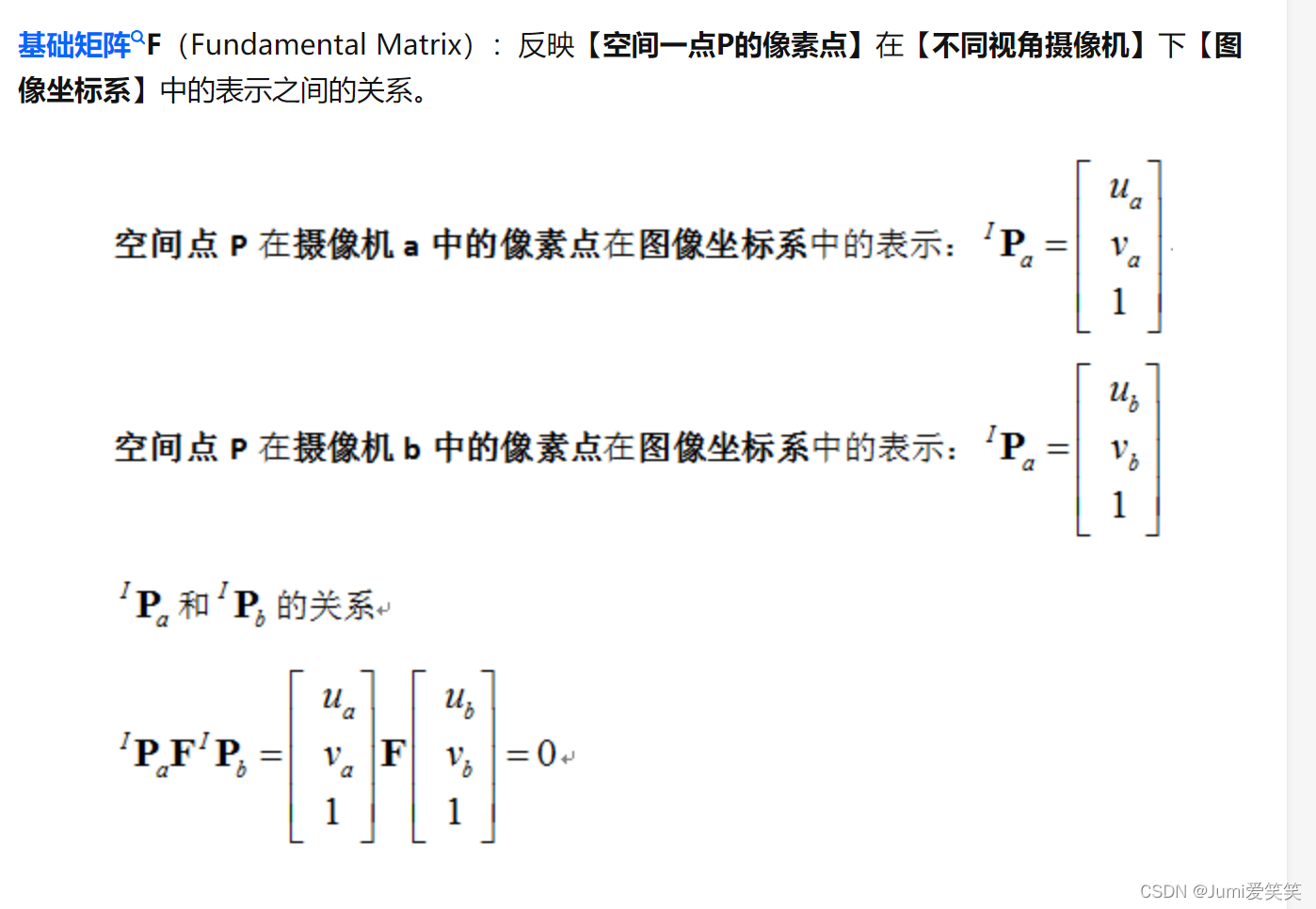
本质矩阵与基础矩阵如下图所示:
其中E为本质矩阵,
K
K
K及
K
′
K^{'}
K′是两个相机的内参,F为基础矩阵,
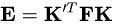
我们可以这么理解:本质矩阵是一个三维点在相机坐标系下的变换,A相机坐标系下的三维点经过内参的转置变换可以其在A相机图像坐标系的位置,经过基本矩阵获得其在B相机图像坐标系的位置,再经过B的内参,获得其在B相机坐标系下的位置;














08-30
 193
193
193
02-16
741
741
08-03
4706
4706
08-22
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









